Downloaded 58 times






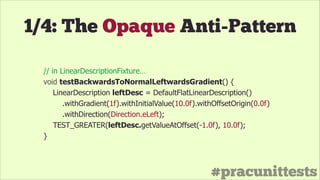
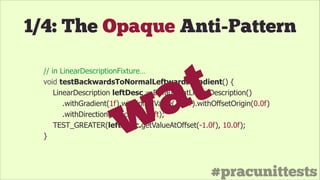
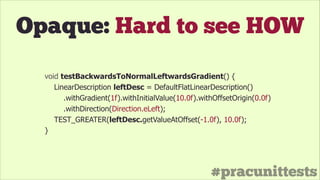
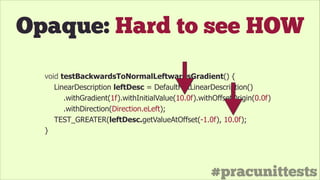
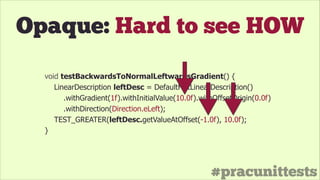
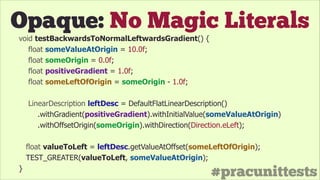
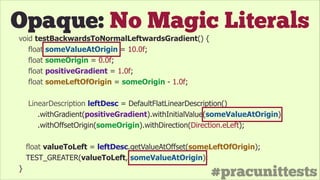
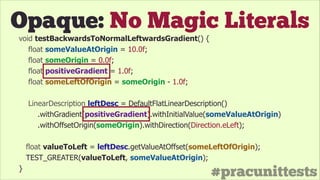
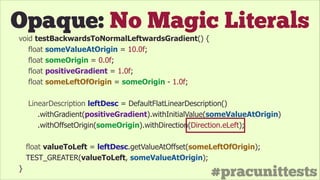
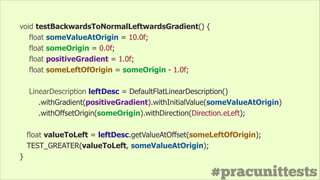
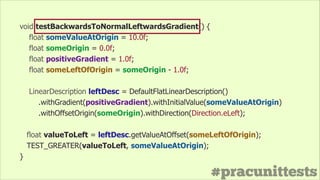
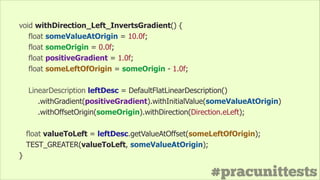
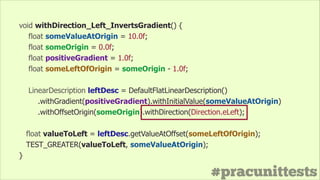
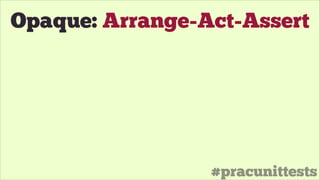
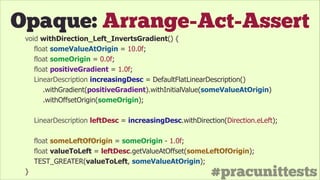
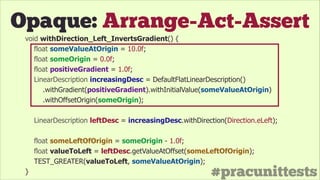
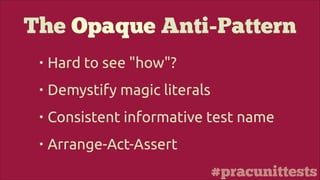

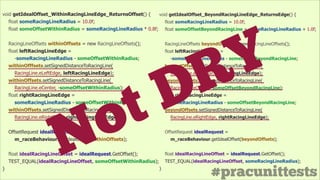
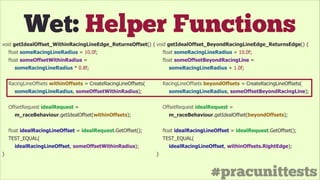

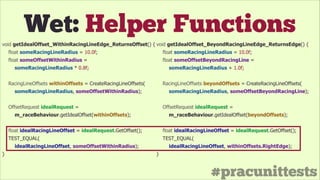
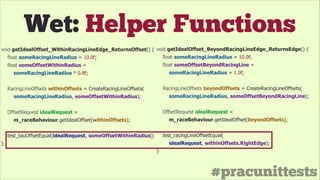
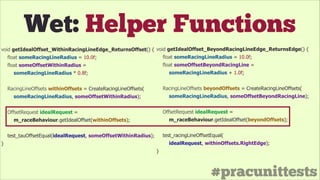


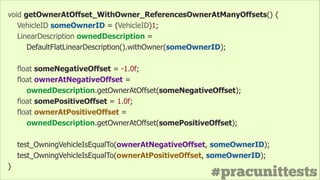
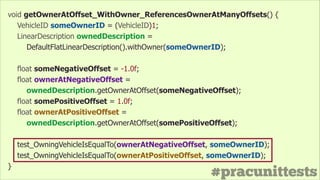
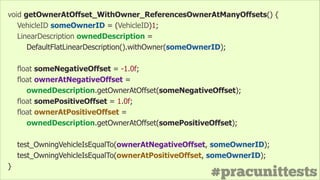

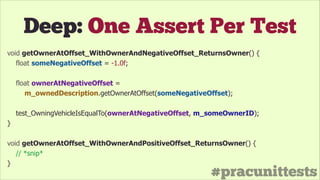
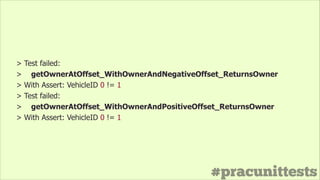
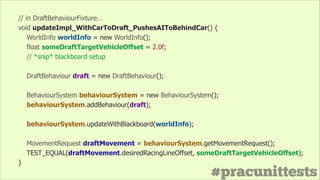
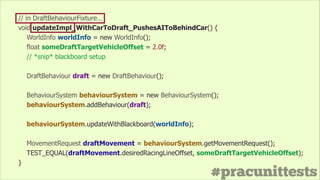
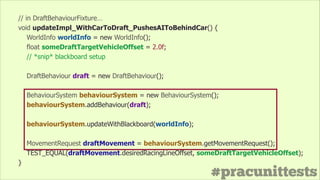

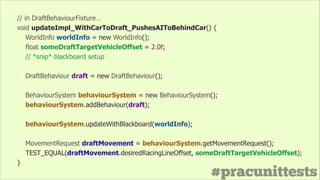





The document discusses unit testing practices in game development, focusing on test-driven development and the qualities of effective unit tests. Key concepts include the importance of readable, maintainable, and trustworthy tests, as well as common anti-patterns to avoid like opaque tests and magic literals. Examples from a racing game project outline how to structure tests for clarity and functionality.








































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)





