Download to read offline
![Motivation: Using CMA-ES
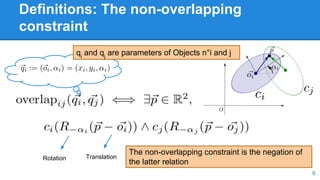
In [Mar13] the packing problem was solved minimizing a violation function
with the CMA-ES algorithm. The function is a measure of overlapping.
The approach gives
encouraging results, but
requires ad-hoc distance
functions for each pair of
objects
Our objective is to replace these ad-hoc formulas by a numerical algorithm
4](https://image.slidesharecdn.com/packingcurvedobjectsijcaifinalversion1-150807123104-lva1-app6892/85/Packing-Curved-Objects-4-320.jpg)
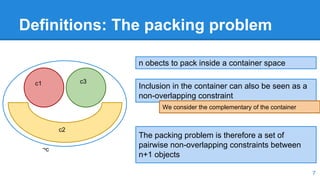

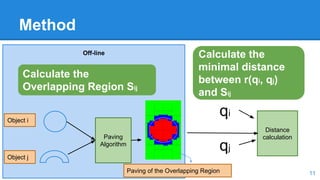
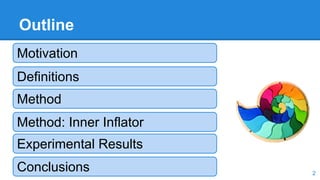
![Method: Paving of the Overlapping Region
Outer Rejection Test
Inner Inflation [detailed further]
Bisection
Branch and Bound algorithm, that alternates 3 steps:
Starts with an arbitrary large box [qj]
The paving is stored in a tree structure
12](https://image.slidesharecdn.com/packingcurvedobjectsijcaifinalversion1-150807123104-lva1-app6892/85/Packing-Curved-Objects-12-320.jpg)
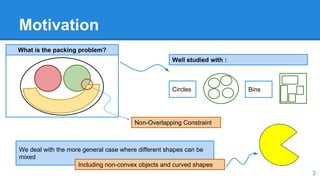
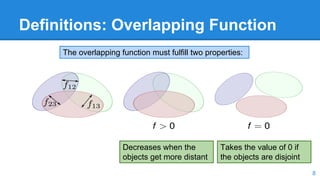
![Resulting
inflation
Method: Inner Inflation
p satisfies
14
Translation Rotation
The boundary angles of [ᾱ , ⍶] are two angles that
makes the boundary of Object j meets p
~
~](https://image.slidesharecdn.com/packingcurvedobjectsijcaifinalversion1-150807123104-lva1-app6892/85/Packing-Curved-Objects-14-320.jpg)
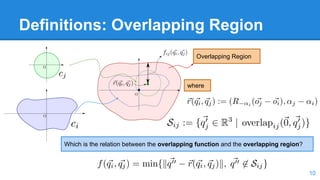
![Method: Inner Inflation
15
Cartesian
Product [ᾱ , ⍶][oj
]](https://image.slidesharecdn.com/packingcurvedobjectsijcaifinalversion1-150807123104-lva1-app6892/85/Packing-Curved-Objects-15-320.jpg)
![Conclusions
We have presented a numerical algorithm that replaces such formulas.
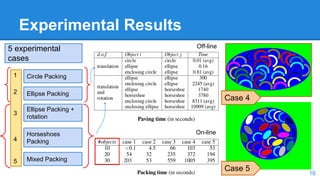
The experimental results shows that our approach:
In [Mar13] was proposed an original approach for solving the generic packing
problem, requiring ad-hoc distance formulas.
17
Is not competitive for standard packing problems.
But is able to pack arbitrary objects, including non-convex ones.
The approach is particularly well-suited for uniform packing.
Limitation: the processing time increases with the number of shapes.
Objects with the same shape](https://image.slidesharecdn.com/packingcurvedobjectsijcaifinalversion1-150807123104-lva1-app6892/85/Packing-Curved-Objects-17-320.jpg)



This document presents a method for packing curved and non-convex objects without overlap. The method uses an offline algorithm to calculate the overlapping region between all object pairs and the minimum distance between them. An online inner inflation method then finds the closest non-overlapping configuration by iteratively inflating objects within their overlapping regions. Experimental results show the approach can pack arbitrary object shapes, including rotations, but has increasing processing time with more complex object combinations.





































