This document is a project report submitted by Omar Omrane to obtain a diploma in engineering from the National School of Engineering of Monastir in Tunisia. The report is focused on artificial lift design and simulation using AutographPC software. It includes dedications to his family for their support and acknowledgments to his academic and industrial supervisors for their guidance. It also provides lists of figures and tables and introduces the general topics that will be discussed in each chapter, including an overview of the oil and gas industry, electrical submersible pumps, and a case study on pump sizing.






![List of tables
Chapter I
Table I- 1: Advantages and Disadvantages of artificial lift technologies[4]......................................... 15
Chapter III
Table III- 1: Pump Design data for 3 wells ........................................................................................... 34
Table III- 2: Pump intake pressure calculation steps............................................................................. 38
Table III- 3: Free gas calculation steps.................................................................................................. 41
Table III- 4: Total Dynamic head calculation ....................................................................................... 45
Table III- 5: Required Data for pump selection .................................................................................... 46
Table III- 6: Pump specifications .......................................................................................................... 49
Table III- 7: Seal horsepower estimation .............................................................................................. 51
Table III- 8: required motor power........................................................................................................ 52
Table III- 9: motor selection specification ............................................................................................ 52
Table III- 10: Motor load calculation.................................................................................................... 52
Table III- 11: Line losses per 1000 ft calculation.................................................................................. 53
Table III- 12: Temperature correction factor estimation....................................................................... 53
Table III- 13: Voltage drop per 1000 ft calculation............................................................................... 54
Table III- 14: Total voltage drop calculation ........................................................................................ 54
Table III- 15: Motor nameplate voltage drop calculation...................................................................... 55
Table III- 16: Power cable's operating temperature. ............................................................................. 55
Table III- 17: Surface Voltage calculation ............................................................................................ 56
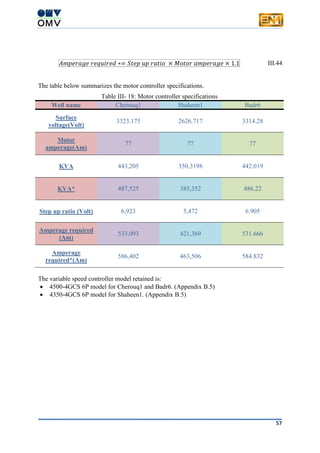
Table III- 18: Motor controller specifications....................................................................................... 57
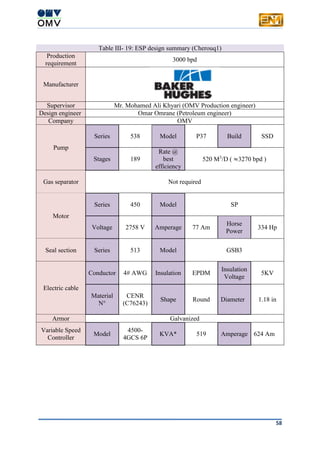
Table III- 19: ESP design summary (Cherouq1)................................................................................... 58
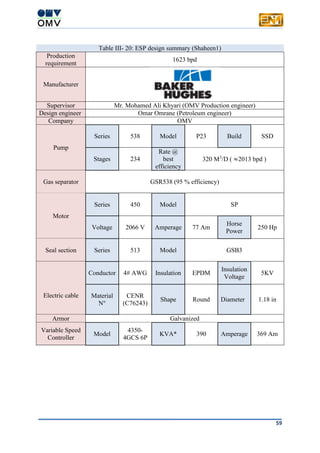
Table III- 20: ESP design summary (Shaheen1) ................................................................................... 59
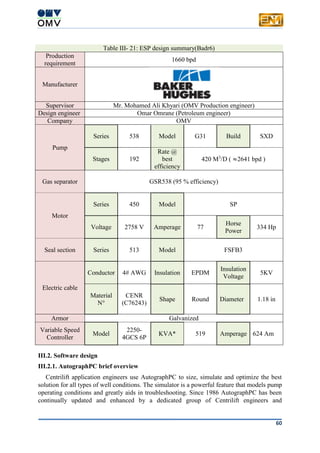
Table III- 21: ESP design summary(Badr6).......................................................................................... 60
Table III- 22: Well input Data (Software Design)................................................................................. 61
Table III- 23: Well Output Data (Software Design).............................................................................. 63
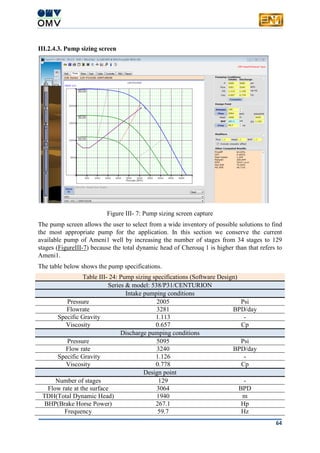
Table III- 24: Pump sizing specifications (Software Design) ............................................................... 64
Table III- 25: Motor sizing specifications (Software Design)............................................................... 65
Table III- 26: Seal sizing specifications (Software Design).................................................................. 66
Table III- 27: Cable sizing specifications (Software Design) ............................................................... 67
Table III- 28: Controller sizing specifications (Software Design) ........................................................ 68
Chapter IV
Table IV- 1: CAPEX calculation........................................................................................................... 72
Table IV- 2: Net Cash Flow calculation................................................................................................ 72](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-8-320.jpg)






![7
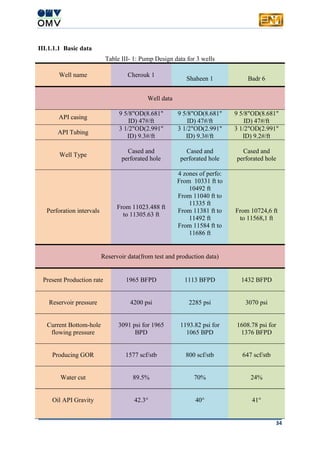
Figure I- 2: main pressure losses within production system[1]
I.3. Petroleum production engineering
I.3.1. Introduction
Production engineering technologies attempt to maximize oil and gas production in a most
possible profitable way. It offers different methods and technologies allowing to:
Evaluate inflow and outflow performance between the reservoir and the wellbore.
design completion system
Select the proper artificial lift equipment
Select equipment for surface facilities
The only way to achieving these previous responsibilities, is for production engineers to
elaborate a detailed analysis of these distinct, yet related parts:
o The components of oil and gas production system
o The fundamentals of well performance
o well completion
o oil wells activation systems
I.3.2. Production optimization and well performance
I.3.2.1. Well performance: Nodal system analysis
Well analysis is the most important step to optimize oil production. Production
optimization aims to find the flow rate of the producing well based on various approaches.
Over the years oil and gas industry have been resorted to a numerous optimization tools and
techniques to support decisions in order to reach the highest production performance possible.
One of these techniques is designing production systems and facilities.
This depends upon 'NODAL' system analysis approach. It involves employing correlations
to predict multiphase flow behavior through pipes, well completions, restrictions and the
reservoir. For this reason experts specialized in production optimization employ tow methods:
Well inflow performance relationship (IPR) and tubing performance relationship.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-16-320.jpg)
![8
I.3.2.1.1. Inflow performance from the reservoir to the wellbore
The relationship between bottom-hole pressure and corresponding production rates is of a
paramount importance for the description of well behavior. this is called the well's inflow
performance relationship (IPR) and usually obtained by running well tests.
Productivity Index concept
The productivity index is a mathematical measure of the well potential or ability to produce
and is a commonly measured well property. It's the most optimistic approach to describe the
inflow performance of oilfield wells.
To utilize this concept, four assumptions have to be realized:
Radial flow near the wellbore area
A single phase, incompressible liquid is flowing
A homogeneous distribution of the formation permeability
The fluid is fully saturated in the formation
For general flow through porous media:
𝑄 =
𝐾𝐴(𝑃0 − 𝑃1)
𝜇𝐿
I.1
But in our case we're working with oil reservoirs to find the production rate of any oil well or
the Darcy law equation:[2]
𝑄 =
7.08. 10−3
ℎ𝐾0(𝑃𝑟 − 𝑃 𝑤𝑓)
𝐵0 𝜇0 ln((
𝑟𝑒
𝑟𝑤
) − 0.75)
I.2
where
𝐵0: liquid volume factor, bbl/STB
𝜇0: average viscosity, cP
𝑟𝑒: drainage radius of well, ft
𝑟𝑤: radius of wellbore, ft
𝐾0: effective permeability, md
ℎ: effective feet of pay(height), ft
𝑃𝑟: reservoir pressure, psi
𝑃 𝑤𝑓: flowing bottom-hole pressure, psi
If we make the assumption that ℎ, 𝐾0, 𝑟𝑤, 𝑟𝑒, 𝜇0 𝑎𝑛𝑑 𝐵0 are constant for a particular well the
equation becomes:
𝑞 = 𝐾(𝑃𝑅 − 𝑃 𝑤𝑓) I.3
where K is the Productivity Index.
Finally we obtain the equation I.4.
𝑞 = 𝑃𝐼(𝑃𝑅 − 𝑃 𝑤𝑓) I.4
PI is usually found by measurement (down-hole gauge and surface flow rate).
It calculates the highest maximum flow rate (AOF) since no change from producing below
bubble point is assumed.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-17-320.jpg)
![9
Figure I- 3: Straight-line IPR (for an incompressible liquid) [1]
We can notice in Figure I.3 that the curve of the wellbore flowing pressure (Pwf) in
function of the flow rate (q) is a straight line of a negative slope (−1/PI). Also this graph
shows two important points : The first one ,located on the x-axis, represents the maximum of
the potential rate corresponding to the minimum of the wellbore flowing pressure which is
zero whereas the second one ,located on the y-axis matches the two values of the minimum
flow rate (zero) and the maximum wellbore pressure (Pr: reservoir pressure) that can be
attained.
the maximum flow rate which is impossible to achieve is called typically Absolute Open
Flow Potential typically known for the abbreviation AOF. This latter is used only to compare
between different wells' deliverability. So to obtain the flow rate at any flowing bottom-hole
pressure it's sufficient to know the productivity index PI, the bottom-hole pressure Pwf and
apply the equation I.4. the productivity index is defined as the flow rate per unit pressure
drop.
Voglel's method
When two phase inflow is taking place in the well, straight line IPR are not applicable.
After a thorough study concerned inflow performance relationship of the well with a solution
gas Vogel proposed the following equation.[2]
𝑄
𝑄 𝑚𝑎𝑥
= 1 − 0.2 (
𝑃 𝑤𝑓
𝑃𝑅
) − 0.8 (
𝑃 𝑤𝑓
𝑃𝑅
)
2
I.5
where
Q: liquid rate, STB/day
Qmax: maximum rate at bottom-hole pressure (Pwf), STB/day
PR: average reservoir pressure, psi
Pwf: bottom-hole flowing pressure, psi
Figure I.4 represents Vogel's inflow performance curve.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-18-320.jpg)
![10
Figure I- 4: Vogel 's inflow performance curve
Sum up IPR
When multi-rate test data is available the straight line IPR and the Vogel IPR curve are
combined to create a new one describing the well performance when the reservoir pressure is
above the bubble point while the wellbore pressure is below. The resulting straight line has a
slope of (1/𝑛). Figure I-5 compares the production rate as a function of drawdown for an
under-saturated oil (straight line IPR, line A) and a saturated oil showing the two phase flow
effects discussed above (curve B).
Figure I- 5: Inflow Performance Relationship[2]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-19-320.jpg)

![12
Figure I- 7: Operating point
I.3.2.2. Artificial lift
I.3.2.2.1 Introduction
Over a period of time since the oil field begin producing the reservoir pressure decrease.
As a result the pressure becomes insufficient to bring up the fluid to the surface. In this case
artificial lift methods are employed allowing additional support.[3]
There are several common artificial lift techniques that have been developed and optimized
for different operating conditions such as rod pumps, electric submersible pumps and
hydraulic pumps) apart from gas lift.
I.3.2.2.2. Artificial lift forms
o Rod Pumps
Rod pumps (Figure I-8) are the most widely used in-land form of artificial lift. this unit is
made up of a surface unit connected to a down-hole with sucker rods. The main role of the
rod pump is creating a reciprocating motion in a sucker-rod string that connects to the down-
hole pump assembly. The conversion of this reciprocating motion to vertical fluid movement
is done by the intervention of a plunger and valve assembly. . This type of pump is used in
low flow rate wells (typically 5- 1500 of barrels of liquid per day).[3]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-21-320.jpg)
![13
Figure I- 8: Typical rod pump [3]
o Hydraulic Pumps
Hydraulic system transfer energy down-hole by pressurizing special power fluid, usually
water or light refined oil or pumped through well tubing or annulus to a subsurface pump,
which transmits the potential energy to produced fluids. So as shown in Figure I-9 the fluid is
injected into the pump and a small-diameter nozzle, where it becomes a low pressure, high
velocity jet. Produced fluid from the well-bore is mixed with the injected fluid and then goes
into an expanding-diameter diffuser. knowing that in the Bernoulli equation of state:
ℎ +
𝑉²
2𝑔
+
𝑃
𝜌𝑔
= 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡 II.6
when the pressure goes down the velocity goes up and vice versa. In the diffuser the fluid
underwent a velocity reduction and a pressure elevation. Common pumps consist of jets
(Venturi and orifice nozzles), reciprocating pistons, or less widely used rotating turbines.[6]
Figure I- 9: Hydraulic pump[4]
o Electric Submersible Pump
Electrical submersible pump is known as an economical and effective means of lifting
large volumes of fluid from deep wells under a variety of well conditions. Figure I-10
represents the ESP system .This system is characterized by it centrifugal pumps which contain
spinning impellers keyed on the shaft to put pressure on the surrounding fluid and leading it to
the surface. ESP is very versatile artificial lift method and can be found in operating](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-22-320.jpg)
![14
environments all over the world. They can handle a very wide range of flow rates. The
remainder of this report details the components, sizing and operating principle.[3]
Figure I- 10: ESP system[4]
o Gas Lift
Gas Lift (Figure I-11) is a form of artificial lift where gas bubbles assist in lifting the oil
from the well. It's an additional high pressure gas injected either to the casing or tubing
annulus. The main purpose of gas lift technology is to reduce the well fluid density in order to
be capable to reach the surface. The process is as follows, the injected gas passes through a
valve where it mixes with the fluid and reduce its density. The reservoir pressure then lifts the
combined liquids to the surface where they are separated.[3][4]
Figure I- 11: Gas lift system[3]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-23-320.jpg)
![15
I.3.2.2.3. Advantages and disadvantages of different artificial lift technologies:
The advantages and disadvantages of the Major artificial lift methods are listed and compared
in Table I-1. Concerning electrical submersible pump advantages and limitations will be
treated in the next chapter.
Table I- 1: Advantages and Disadvantages of artificial lift technologies[4]
Artificial Lift Advantages Disadvantages
Rod Pumps
-Simple to operate
-Unit easy changed
-Can achieve -low BHFP
-Can lift high temperature
viscous oil
-Low intervention cost
-Can be installed in remote
locations without electricity
-Best understood by the field
personnel
-Pump wear with solids
(Sand, Wax...)
-Free gas reduce pump
efficiency
-heavy equipment for
offshore use
-Restricted flow and depth
-Potential wellhead leaks
Venturi Hydraulic Pump
-High volume
-Can use water as power
fluid
-Tolerate high well deviation
-Simplifies completions
significantly
-No moving parts, can
tolerate solids.
-High surface pressure
-Free gas reduce pump
efficiency
-Sensitive to change in
surface flow line-pressure
-Cavitations can occur with
high GOR
-High GOR impacts
performance
Gas Lift
-Solids tolerant
-large volume in high PI
wells
-Simple maintenance
-Unobtrusive
Surface location
-Tolerate high well deviation
-Tolerate high GOR reservoir
fluids
-Fairly low operation cost
-Flexibility: Can change
producing rate by adjusting
injection rates or/and
pressure.
-Lift gas may not be
available
-Not suitable for viscous
crude oil or emulsion
-Casing must withstand lift
gas pressure
I.4. Properties of reservoir fluids and phase behavior
I.4.1. Multiphase flow theory patterns and map
Flow theory
The three components of the equation for predicting pressure losses are: elevation or static
components, friction component, acceleration component.
∆𝑃𝑡𝑜𝑡𝑎𝑙 = 𝐸𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 ℎ𝑦𝑑𝑟𝑜𝑠𝑡𝑎𝑡𝑖𝑐 + 𝐹𝑟𝑖𝑐𝑡𝑖𝑜𝑛 + 𝐴𝑐𝑐𝑒𝑟𝑎𝑡𝑖𝑜𝑛 I.7](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-24-320.jpg)





![21
II.1. Introduction
II.1.1. General history of ESP
Unlike the other artificial lift methods electrical submersible pump was innovated and
improved by a Russian named Armais Arutunoff in the late 1910s.[5]
In 1911, Arutunoff started the company Russian Electrical Dynamo of Arutunoff (its acronym
REDA still being known all over the world) and developed the first electric motor that could
be operated submersed in an oil well.[5]
In 1926 the first installation of electrical submersible was operated in the El Dorado field in
Kansas.
II.1.2. General overview of ESP
The electrical submersible pump typically called ESP is a powerful and profitable means
of artificial lift representing technical characteristics in order to tolerate harsh environment
conditions and produces moderate to high amounts of well fluids in even extreme regions.
Electrical submersible pump deal with many problems which could be encountered when
producing such as high water cut, sand production, highly deviated wells, high bottom hole
temperature, abrasive and corrosive issues and high viscosity fluid.
ESP installation
ESP consists of an electrical alternative current motor, seal section, gas separator, multi-
stage centrifugal pump, power cable, surface control mechanism and transformers.
The classical or “conventional” installation is illustrated in Figure II-1 where the ESP unit is
run on the tubing string and is submerged in well fluids.[7]
The electric submersible motor is at the bottom of the unit just above the perforation zone.
It is connected to the protector (a.k.a. seal section) that ensures the unit safety through many
crucial functions. Overhead of the protector a pump intake or gas separator is settled which
allows well fluids to enter the centrifugal pump excluding from low quantities of free
gas(taken from the solution in the gas separator). Liquid is lifted up to the surface by the
multistage centrifugal pump, the heart of the ESP system. Surface equipments include a
junction box, surface electric cables and a control unit called switchboard that provides
measurement and control functions. The ESP unit receives AC electricity from a set of
transformers (not shown) which supply the required voltage by stepping up or down the
voltage available from the surface electric network.[7]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-30-320.jpg)
![22
Figure II- 1: Conventional ESP installation[7]
Theory of Operation
ESP constructional and operational features underwent a continuous evolution over the
years, their basic operational principle remained the same.[7]
The whole ESP systems function is to transform electrical power supplying from the
surface through copper resistant cables to head or potential energy in a form of pressure . ESP
units are typically installed over the perforation zone permitting fluid to flow from the
perforated area past the motor aiming to cool it. The motor generates the rotation of a shaft
which connects the seal protector and the pump by a mechanical coupling. So as the impellers
(the rotating part of the pump stage) are keyed to the shaft they will rotate in highly speed at
the same RPM (rotation per minute) of the motor shaft imparting Kinetic energy to the fluid
from a centrifugal force with the intervention of a stationary part of the pump called
diffuser.[3]
II.2. ESP components
ESP Systems include all the necessary components to transfer power from the surface,
convert the power into shaft rotation and impart energy to the produced fluids. A typically
ESP system includes:[3]
ESP down-hole components:
• Pump
• Gas Separator
• Seal
• Electric Motor
ESP Surface components:
• Junction box
• Power Cable
• Motor Controller
• Transformer](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-31-320.jpg)
![23
II.2.1. ESP down-hole components
II.2.1.1 Pump
Introduction and purpose
Being the major part of the ESP system it's crucial to understand the operating principle of
the submersible pump. The main objective of a multistage centrifugal pump is to lift the fluid
from the bottom-hole up to the surface by converting the energy from rotational shaft into
centrifugal pump.
components
As shown in figure II.2 the submersible pump is made of the following basic components:
Shaft, Impeller, Diffuser, Housing and Intake
Figure II- 2: ESP submersible pump cutaway[3]
Impeller
The impeller is locked to the shaft and rotates at the motor RPM. As the impeller rotates it
imparts centrifugal force on the production fluid. Figure II-3 is an illustration of an impeller
keyed to a shaft, and identifies key subcomponents of the impeller.[3]
Figure II- 3: Illustration of impeller and subcomponents[3]
Diffuser
The diffuser in the Figure II-4 turns the fluid into the next impeller and does not rotate.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-32-320.jpg)
![24
Figure II- 4: illustration cutaway of a diffuser[3]
pump stage
The pumps stage in Figure II-5 is a combination of an impeller and a diffuser.
Figure II- 5: Illustration of a pump stage[3]
pump Intake
The pump intake in Figure II-6 attaches to the lower end of the pump housing and provides
a passageway for fluids to enter and a flange to attach to the ESP seal.
Figure II- 6: Pump intake[3]
II.2.1.2 Gas separator
Introduction and purpose
Gas production has been a problem since the early days of oil production. It limited
production on many oil wells producing with pumps, It causes a gas locking and cavitations.
For this reason a gas separator should be designed to keep free gas for entering the pump.[3]
Components
The ESP Gas Separator in Figure II-7 is made up of the following major components:[3]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-33-320.jpg)
![25
- Gas Vent Port, Guide Vane, Inducer or High Angle Vane Auger (Patented), Separation
Chamber, Intake and a Shaft
Figure II- 7: Rotary gas separator[3]
II.2.1.3. Seal section
Introduction and purpose
The electric motor of the ESP system is completely sealed against the produced liquid in
order to prevent short-circuits and burning of the motor after it is contaminated with well
fluids.[7]
ESP motors must be kept open to their surroundings but at the same time must still be
protected from the harmful effects of well fluids. The main reason for this is that since the
motor must be filled up with a high dielectric strength oil, ESP motors operating at elevated
temperatures, if completely sealed, would burst their housing due to the great pressure
developed by the expansion of the oil.[7]
This is guaranteed by connecting a protector (a.k.a. seal) section between the motor and the
centrifugal pump.[7]
Seal sections perform the following vital functions:
• Isolates the clean motor oil from wellbore fluids to prevent contamination.[3]
• Couples the torque developed in the motor to the pump intake via the protector shaft.
• Provides a reservoir for the thermal expansion of the motor's oil.[4]
Seal section types
There are two main types of seal section:[4]
Bag type protectors (positive seal): Designed to physically separate the well fluid and
motor oil.
Labyrinth type protectors: Use the difference in specific gravity of the well fluid and the
motor oil to keep them apart even though they are in direct contact.
Components
Seal Sections are made up of the following major components:[3]
Mechanical Seals, Elastomer Bag(s), Labyrinth Chamber(s), Thrust Bearing, Heat Exchanger
Figure II-8 shows the construction of major components of a typical seal section.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-34-320.jpg)
![26
Figure II- 8: ESP combined seal section components[3]
II.2.1.4. Electrical motor
Introduction and purpose
The major and sole objective of a motor is the transformation of electrical energy into
motion that turns the shaft. This latter is connected through the seal and gas separator and
turns the pump impellers.[3]
components
Figure II-9 is an ESP Motor made up of the following major components:[3]
- Rotors, Stator, Shaft, Bearings, Insulated Magnet Wire, Winding Encapsulation, Rotor and
Stator Laminations, Housing, Thrust Bearing
Figure II- 9: ESP motor cutaway illustration[3]
II.2.2. ESP Surface components
II.2.2.1. Junction Box
A junction box (vent box) performs three functions. First, it provides a connection point for
the surface cable from the motor control panel to the power cable in the wellbore coming
from the wellhead . Second, it allows for any gas to vent that may have migrated through to
the power cable.
Finally, it provides accessible test point for electrically checking down-hole equipment.[4]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-35-320.jpg)
![27
During the installation of the junction box it's required to leave a minimum distance from
wellhead (35 ft) and from the switchboard (15ft).
II.2.2.2 Power cable
Banded to the tubing, the power cable is considered as an electrical power transfer means
from the surface to the down-hole motor. This cable must be of specific construction to
prevent mechanical damage, and able to retain its physical and electrical properties when
exposed to hot liquids and gasses in oil wells.[3][4]
The power cable is available on both flat or round construction. It consists of three copper
conductor wires extending from the top of the motor lead to the wellhead. The size of the
cable selected is based on amperage and voltage drop.[3][4]
II.2.2.3. Motor controller
The main function of the motor controller is primarily to protect the ESP motor by
measuring the surface current and voltage to avoid the underload and overload of the motor.
The controller also provides the capability to monitor performance of down-hole electrical
system(current, voltage, frequency, etc).
II.2.2.4. ESP variable speed drive
Variable speed drives (VSD) allows the variation of the ESP performance through the
motor speed control. As the shaft connects the motor to the protector and the pump VSD
modify also the pump impellers rotation speed. By allowing the pump speed to be varied, the
rate and/or head can be adjusted (depending on the application) with no modification of the
down-hole unit.[3]
Its numerous operational features make it one of the ESP assets such as:[3]
Controlling motor speed can avoid heat failure (burning of the motor components)
Control well drawdown
Adjust ESPs with changing well conditions
Decrease system stress at start up
II.2.2.5. Transformer
Since ESP equipments operation need a variable range of voltage from 250 volts up to
4000 volts depending on the power of the components. Voltage transformation is required
because electrical power is usually supplied to oilfield at a voltage of 6000 volts or higher.[3]
Transformers contain a substantial number of secondary voltage taps which allows a wide
range of output voltages. This is required in order to adjust the surface voltage to account for
cable voltage drop that occurs due to setting depths.[3]
II.2.3. ESP mainly support equipment
Most of well fields requires the involvement of some additional support equipment. For
example the most substantial ones are the wellhead, check valves, drain valve, backspin relay
and the centralizer. These equipments depends necessarily on the power available and the
conditions of the well.[3]
Wellhead
The main function of the wellhead is to support the weight of the subsurface equipment
and to maintain annular pressure of the well. It includes the pack-off generally known as the
tubing head bonnet. It's an additional element of sealing around the cable and the tubing. The
highest rated pack-off can resist pressure up to 5000 psi.[3]
Check Valve](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-36-320.jpg)
![28
To avoid fluid falling down-hole during the shut off of the ESP system a check valve
should be installed. Without this equipment reverse rotation of the pump impellers and as a
result the reverse rotation of the pump and motor shaft may occur. In this case it cause a
electrical failure or mechanical damage to the equipment.[3]
Centralizer
Centralizers are used in ESP applications to set the equipment in the center of the wellbore.
This is chiefly practical in deviated wells to eliminate external damage and insure proper
cooling of the equipment..[3]
II.3. Performance of an ESP system
The Brake Horse Power is the power required to drive the pump which needs to cover the
sum of the energy that pump the well fluid and the energy losses arising in the pump and the
tubing due to friction. The mathematical relationship between head, capacity, efficiency and
brake horsepower is expressed as: [3]
𝐵𝐻𝑃 =
𝑄 × 𝐻 × 𝑆𝑝𝑒𝑐𝑖𝑓𝑖𝑐 𝐺𝑟𝑎𝑣𝑖𝑡𝑦
𝑃𝑢𝑚𝑝 𝐸𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑐𝑦
II.1
Where
Q: flow rate, bpd
H: head required, ft
The performance of ESP pumps is characterized by the pump performance curves which are
plotted in figure II-10 in the function of the pumping rate and represent:[7]
the head developed by the pump
the efficiency of the pump, and
the mechanical power (brake horsepower) required to drive the pump when pumping
water.[7]
Figure II- 10: example performance curve of an ESP pump[7]
These curves are experimentally obtained with freshwater under controlled conditions at an
operating temperature of 60ºF. Tests on submersible pumps are made by driving the pump at
a constant rotational speed, usually 3,500 RPM for 60 Hz service. The actual performance
may be obtained by a simple correction using the Affinity Laws.[7]
Affinity Laws](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-37-320.jpg)
![29
These are a couple of equations that link the actual speed of a centrifugal pump and its
performance parameters. There are in total three relationships:
The flow rate is directly proportional to the pump's operating speed:
𝑄2 = 𝑄1
𝑁2
𝑁1
II.2
The head is proportional to the square of the pump's operating speed:
𝐻2 = 𝐻1 (
𝑁2
𝑁1
)
2
II.3
The brake horse power is proportional to the square of the pump's operating speed:
𝐵𝐻𝑃2 = 𝐵𝐻𝑃1 (
𝑁2
𝑁1
)
3
II.4
Where:
Q1: the first flow rate, bpd
Q2: the second flow rate, bpd
H1: the first head, ft
H2: the second head, ft
BHP1: the first brake horsepower, HP
BHP2: the second brake horsepower, HP
N1: first rotational speed, rpm
N2: second rotational speed, rpm
II.4. Evaluation of ESP components
II.4.1 ESP advantages
General advantages of using ESP units can be summed up as follows:
Good efficiency over the widest range of production rate ( high to extremely high amount
of liquid)[5][4]
Can achieve high production rates: the maximum is around 30,000 bpd from ft.[4][5]
Suitable for both vertical and deviated well[5]
Can operate reliably in onshore and offshore wells.[4]
Can be flexible to accommodate changing conditions in time (PI, water cut Pwf, Pr, etc)
due to the Variable Speed Drive characteristic.[4]
Can operate under tough conditions such as low bottom-hole pressure, high bottom-hole
temperature, high amount of corrosion and scale. [4][5]
Surface equipment required a minimal space comparing with the other artificial lift
systems(sucker rod...) [5]
II.4.2. ESP disadvantages
The most known of ESP disadvantages are listed below:
Expensive intervention cost: A pulling unit (heavy work-over rig) is required to retrieve
the failed ESP regardless of failed component. [4][5]
Extremely high well temperature cable and motor insulation.[4]
High solids and sand or abrasive materials may cause rapid equipment wear. For this
reason special abrasion-resistant materials are used and that increase the capital cost.[4]
[5]
The presence of free gas at pump suction weakens the submersible pump's efficiency by
gas locking problems and can even totally prevent liquid production.[5]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-38-320.jpg)
![30
ESP installation required a crucial availability of high voltage electrical power. [5]
Production of high viscosity oils increases power requirements and reduces lift.[5]
II.5. Conclusion
In this chapter we intended to present the electrical submersible pump system. The main
objective was to thoroughly describe the ESP equipments with highlighting the particular
function of each one. We also mentioned the importance and the limitation of the ESP by
enumerating its advantages and disadvantages.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-39-320.jpg)

![32
III.1. Hand sizing
III.1.1. The 9 steps procedure
The design of the Electric Submersible pump system follows these nine steps :
Step1: Basic Data
Collect and analyze all the well data that will be used for the design.[3][8]
Step2: Production Capacity
Determine the well productivity at the desired pump setting depth or determine the pump
setting depth at the desired production rate. [3][ 8]
Step3: Gas Calculation
Calculate the fluid volumes, including gas, at the pump intake conditions. [3][ 8]
Step4: Total Dynamic Head
Determine the required dynamic head and so the pump discharge requirement.[3][ 8]
Step5: Pump Type
For a given capacity and head select the pump type that will have the highest efficiency for
the desired flow rate. [3][ 8]
Step6: Optimum Size of Components
Select the optimum size of pump, motor and protector and check equipment limitations. [3][
8]
Step7: Electric Cable
Select the correct type and size of cable.[3][ 8]
Step8: Accessories and Optional Equipment
Select the motor controller, transformer, tubing head and optional equipment.[3][ 8]
Step9: The Variable Speed Pumping System
For additional operational flexibility, select the variable speed submersible pumping system.
Reliable information or data must be available to design a submersible pumping unit.
Although if the information, especially that pertaining to the well’s capacity, is poor, the
design will not be accurate and will be almost marginal. Bad data often results in a misapplied
pump and costly operation.[3][ 8]
A misapplied pump may operate outside the recommended range, overload or under-load the
motor or drawdown the well at a rapid rate which may result in formation damage. On the
other side, the pump may not be large enough to provide the desired production rate.[3][ 8]
The selection and design procedure may vary significantly depending on the well fluid
properties. The three major types of ESP applications are:[3][ 8]
High water-cut wells producing fresh water or brine.
Wells with multi-phase flow (high GOR).
Wells producing highly viscous fluids.
Following is list of the data required:
A) Wells Data
Casing or liner size and weight.
Tubing size, type and thread (condition).
Perforated or open hole interval.
Pump setting depth (measured and vertical).[3][ 8]
B) Production Data
Wellhead tubing pressure.
Wellhead casing pressure.
Present production rate.
Producing fluid level.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-41-320.jpg)
![33
Static fluid level and/or static bottom-hole pressure.
Datum point.
Bottom-hole temperature.
Desired production rate.
Gas-oil ratio.
Water cut.[3][ 8]
C) Well Fluid Conditions
Specific gravity of water.
Oil API or specific gravity.
Specific gravity of gas.
Bubble-point pressure and temperature.
PVT data.[3][ 8]
D) Power Sources
Available primary voltage.
Frequency.
Power source capabilities.[3][ 8]
E) Possible Problems
Sand Production.
Corrosion.
Paraffin.
Emulsion.
Gas.etc…[3][ 8]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-42-320.jpg)


![39
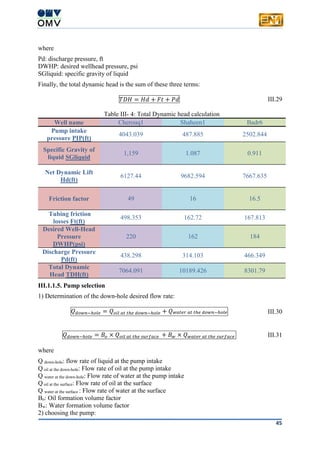
III.1.1.3. Gas calculation
In this third step, we need to determine the total fluid mixture inclusive of water, oil and
free gas that will enter the pump.[3][8]
1) We will determine first of all the solution Gas Oil Ratio (Rs) at the pump intake, for this
purpose we will use the Standing’s approach or correlation and substitute the pump intake
pressure for the bubble pressure in the following formula:
𝑅𝑠 = 𝑆𝐺𝑔 × (
𝑃𝑏
18
×
100.0125×°𝐴𝑃𝐼
100.00091×𝑇(°𝐹)
)
1.2048
III.12
where:
T: reservoir temperature.
SGgas: specifig gravity of gas.
Pb: bubble point pressure
2) Since the oil formation volume factor is given no need to determine it using the Standing’s
approach. We will assume that it will not change remarkably otherwise we could use the
following formula to check the exactitude of our data:
𝐵𝑜 = 0.972 + 0.000147 × {5.61 × 𝑅𝑠 × ((
𝑆𝐺𝑔𝑎𝑠
𝑆𝐺𝑜𝑖𝑙
)
0.5
) + 1.25 × (1.8𝑡 + 32)}
1.175
III.13
Where:
t: Bottom-hole Temperature, °C
Rs: solution gas oil ratio at pump intake
SGoil: specific gravity of oil
SGgas: specific gravity of gas
Bo is measured in (rb/stb) where rb is barrel at reservoir conditions
3) Determine the gas volume factor Bg as follows:
𝐵𝑔 = 5.04 ×
𝑍 × 𝑇
𝑃
III.14
Where:
Z: Gas compressibility factor
T: Bottom-hole temperature degrees Rankin (460+°F)
P: Submergence pressure, psi (reservoir pressure)
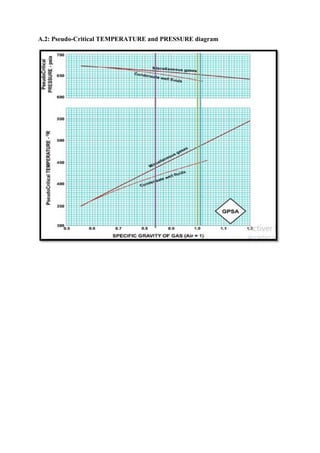
The compressibility factor or the deviation factor Z is not given in the well data table so we
should calculate it.
Based on the gas specific gravity we determine as a first step the pseudo-critical pressure and
temperature referring to the (Appendix A.2)
After determining the Pseudo-critical Temperature Tpc(°R) and the Pseudo-critical Pressure
Ppc (psi) we calculate the Pseudo-reduced Temperature Tpr(°R) and the Pseudo-reduced
Pressure Ppr(psi).
𝑃𝑝𝑟 =
𝑃𝑟
𝑃𝑝𝑐
III.15](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-48-320.jpg)

![41
𝑉𝑤 = 𝐵𝑊𝑃𝐷 × 𝐵𝑤 III.22
Where:
BWPD: barrel of water per day
Bw: water formation volume factor
we suppose that Bw =1
g) The total volume (Vt) of oil, water and gas at the pump intake can be now determined:
𝑉𝑡 = 𝑉𝑤 + 𝑉𝑔 + 𝑉𝑜 III.23
h) The ratio or the percentage of free gas %Fg present at the pump intake to the total of fluid
is:
%𝐹𝑔 =
𝑉𝑔
𝑉𝑡
III.24
Actually, as long as the gas remains in solution, the pump behaves normally and at high
performance as if it’s pumping a liquid of low density. However, the pump begins producing
lower head than required as the gas/oil ratio (at pumping conditions) increases beyond a
“critical” value (usually about 10 % to 15 % of total fluid volume). If the percentage of free
gas to the total of fluid volume is less than 10 %, the pump can withstand this and the
performance decreases slightly but over 10 %, the performance of the pump decreases
significantly. The main reason for this is that it will occur great slippage between the two
phases present liquid and gas leading to decrease of the pump intake pressure an. Accordingly
the phenomenon of cavitation appears and unfortunately the head required couldn't be
achieved, a separator must be installed to deal with this problem.[3][8]
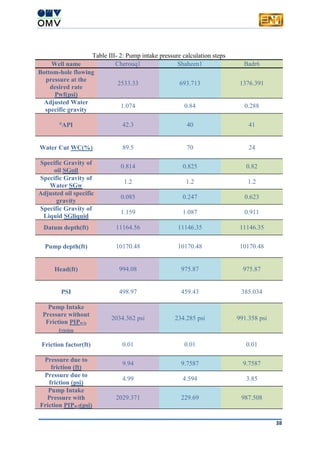
Table III- 3: Free gas calculation steps
Well name Cherouq1 Shaheen1 Badr6
Specific Gravity of
Gas SGgas
0.84 1.08 0.99
Pump Intake
Pressure PIP(psi)
2029.371 229.69 987.508
°API 42.3 41 40
Bottom-hole
Temperature
BHT(°F)
197 198 195.8
Solution GOR
Rs(scf/stb)
657.188 56.376 311.814
Specific Gravity of
Oil SGoil
0.814 0.825 0.82
Bottom-hole
temperature(°C)
91.66 92.22 91](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-50-320.jpg)
![43
Volume of Water at
pump depth
Vw(bbl)
2685
1136.178 398.337
Total Volume at
pump depth Vt(bbl)
3476.212 2184.595 2529.881
Percentage of Free
Gas at pump depth
Fg(%)
5,81% 16.11% 12.94%
In our case of study the percentage of free gas is less than 10% by volume just for
Cherouq1, it would have little effect on the pump performance therefore, a gas separator is not
required. But for Shaheen 1 and Badr 6 we should install a gas separator because the
percentage of free gas is higher than 10%. The gas separator should have the same diameter as
the pump, that's means the same series. Our choice is based on the series of the pump.(See
ESP Design summary table.
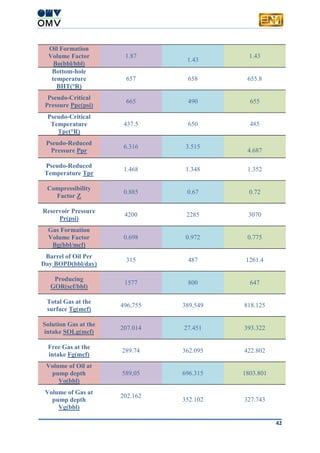
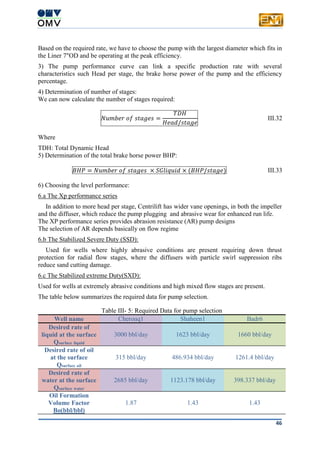
III.1.1.4. Total dynamic head
This step consists on the calculation of the total dynamic head required to pump the desired
capacity. The total pump head refers to feet of liquid being pumped and is calculated to be the
sum of:
Net well lift (dynamic lift).
Well tubing friction losses.
Wellhead discharge pressure converted to footage.[3][10]
The simplified equation is as follows:
𝑇𝐷𝐻 = 𝐻𝑑 + 𝐹𝑡 + 𝑃𝑑 III.25
Where:
TDH: Total dynamic head in feet delivered by the pump when pumping the desired volume.
Hd: Vertical distance in feet between the wellhead and the estimated producing fluid level at
the expected capacity (Figure III-1).
Ft: The head required to overcome the friction losses in tubing.
Pd: The head required to overcome friction in the surface pipe, valves etc… and to overcome
also elevation changes between wellhead and the tank.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-52-320.jpg)
![44
Figure III- 1: Total dynamic head[10]
1) Determination of Hd:
The vertical distance between the estimated producing fluid level and the surface (Hd) is
determined as follows:[3][8]
𝐻 𝑑 = 𝑃𝑆𝐷 − (
𝑃𝐼𝑃 × 2.31
𝑆𝐺𝑙𝑖𝑞𝑢𝑖𝑑
) III.26
Where:
PSD: pump setting depth, ft
PIP: pump intake pressure, psi
SGliquid: specific gravity of the liquid
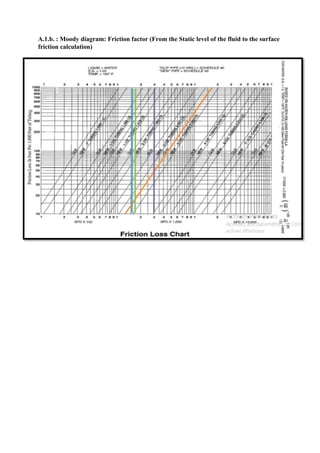
2) Determination of the tubing friction losses:
This value is determined by using the chart of friction losses in API tubular (Appendix A.1.b)
𝐹𝑡 =
𝑃𝑢𝑚𝑝 𝑠𝑒𝑡𝑡𝑖𝑛𝑔 𝑑𝑒𝑝𝑡ℎ × 𝑓𝑟𝑖𝑐𝑡𝑖𝑜𝑛 𝑓𝑎𝑐𝑡𝑜𝑟
1000
III.27
The discharge pressure head (desired wellhead pressure ) is determined as follows:
𝑃𝑑(𝑓𝑡) =
𝐷𝑊𝐻𝑃(𝑝𝑠𝑖) × 2.31(
𝑓𝑡
𝑝𝑠𝑖)
𝑆𝐺𝑙𝑖𝑞𝑢𝑖𝑑
III.28](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-53-320.jpg)
![47
Water Formation
Volume Factor
Bw(bbl/bbl)
1 1 1
Desired rate of oil
at the pump intake
Qoil down-hole
589.05 bbl/day 696.315 bbl/day 1803.801 bbl/day
Desired rate of
water at the pump
intake Qwater down-hole
2685 bbl/day 1123.178 bbl/day 398.337 bbl/day
Desired rate of
liquid at the pump
intake Qliquid down-hole
3274.05 bbl/day 1832.494 bbl/day 2202.138 bbl/day
Desired rate of
liquid at the pump
intake Q liquid down-
hole
520 M3
/day 291 M3
/day 350 M3
/day
Casing OD 9 5/8" 9 5/8" 9 5/8"
Tubing OD 3.1/2" 3.1/2" 3.1/2"
Liner OD 7" 7" 7"
After a thorough checking we choose from the Centrilift pump catalog[6]:
Centurion pump 538 series: P37 (Figure III-2) For Cherouq 1
Centurion pump 538 series: P23 (Figure III-3) For Shaheen 1
Centurion pump 538 series: G31 (Figure III-4) For Badr 6
8) Pump performance curves](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-56-320.jpg)
![48
Figure III- 2: Pump performance curve 538 series P37 Centurion pump[6]
Figure III- 3: Pump performance curve 538 series P23 Centurion pump[6]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-57-320.jpg)
![49
Figure III- 4: Pump performance curve 538 series G31 Centurion pump[6]
a) Pump's stage and housing number
Referring to (Appendix B.1) we choose the number of stages and housing defining each pump
based on number of stage calculated theoretically.
Table III- 6: Pump specifications
Well name Cherouq1 Shaheen 1 Badr6
Desired rate of
liquid at the pump
intake Q liquid down-
hole
520 M3
/day 291 M3
/day 350 M3
/day
Pump series P37 538-SSD series P23 538- SSD series G31 538-SXD series
Pump OD 5.38" 5.38" 5.38"
Operation range
From 330 to 635
M3
/day at 50.0 Hz
From 160 to 370
M3
/day at 50.0 Hz
From 240 to 580
M3
/day at 50.0 Hz
Efficiency(%) 68 % 64 % 46.66 %](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-58-320.jpg)
![50
Ft/stage 11.5 m 12.25 m 13.1 m
Ft/stage 37.73 ft 40.19 ft 42.978 ft
TDH 7064.091 10189.426 8301.797
Number of stages
calculated
188 254 193
Number of stages
required
the values above go well beyond the technical data sheet reference
values.(Appendices: B.1.a, B.1.b and B.1.c)
For this reason we have to choose two or three housing and summing
its corresponding number of stages to ensure reaching the number
required.
189 254 192
Housing required
2 (N°16 and N°6)
Appendix B.1.a
2 (N°17 and N°5)
Appendix B.1.b
2 (N°18 and N°10)
Appendix B.1.c
Brake Horse Power
per stage
1 KW 0.65 KW 1.15 KW
Brake Horse Power
per stage
1.34 HP 0.872 HP 1.542 HP
Total Brake Horse
Power
293.651 HP 221.448 HP 269.839 HP
Shaft Diameter 0.875" 0.875" 0.875"
Level performance XP performance XP performance XP performance
III.1.1.6. Seal section selection
Normally the seal section series should be the same as that of the pump, although, there are
exceptions and special adapters are available to connect the units together. In our case study,
we will assume that the seal section and the pump are of the same series.[3]
The horsepower requirement for the seal section is based upon the total dynamic head
produced by the pump.[3]
We considered that the seal section and pump are of the same series which is 538[9].](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-59-320.jpg)
![51
The GSB3 model is chosen for Cherouq 1 and Shaheen 1 wells (Appendix B.2.a) and
FSFB3 model is picked for Badr 6 well (Appendix B.2.b). The horsepower required for the
seal section is based upon the total dynamic head produced by the pump such indicated from
the chart below: Figure III-5.[3]
Figure III- 5: Horsepower VS Total dynamic head in feet[3]
The table below shows the Seal horsepower estimation
Table III- 7: Seal horsepower estimation
Well name Cherouq1 Shaheen1 Badr6
Total Dynamic
Head (ft)
7064.091 10189.426 8301.797
Seal horsepower
(HP)
3.4 3.45 3.6
III.1.1.7 Motor selection
The most important criteria for motor selection are :
Horsepower
Voltage
Amperage
Load
BHT
The brake horse power required for the motor is calculated before, we have to take into
account the horse power needed for the seal section to calculate the total horse power needed
for the motor.
𝑚𝑜𝑡𝑜𝑟 𝐵𝐻𝑃 = 𝑝𝑢𝑚𝑝 𝐵𝐻𝑃 + 𝑠𝑒𝑎𝑙 𝐻𝑃 III.34](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-60-320.jpg)
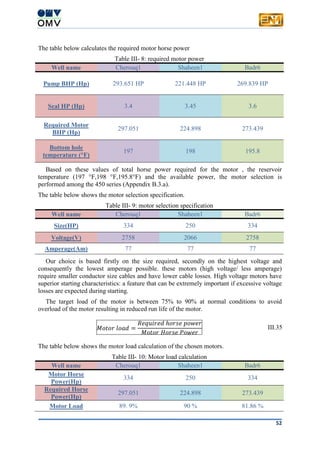
![53
We can conclude that all motor load values are between 75% and 90% that confirms our
choice.
III.1.1.8. Power cable selection
Many parameters are involved in the choice of the power cable namely, amperage (voltage
drop), conductor temperature (insulation material), insulation voltage rating, gas handling
(decompression protection), corrosive properties of well fluid, available space (casing
clearance).
A) Amperage (Voltage Drop)
Line loss is the normal reduction in available voltage after long distance transmission.
High temperatures impede the ability of the conductor to transmit voltage (resistance).
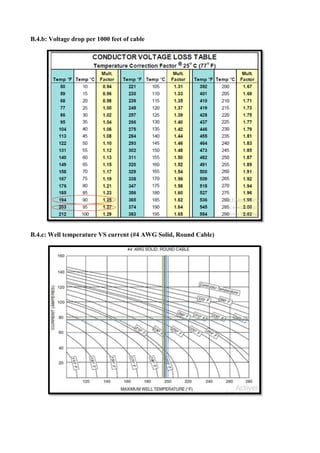
Voltage drop refers to voltage losses due to distance and temperatures.[3][8]
The conductor size is measured by American Wire Gauge(#AWG). The size goes from 1
to 6 with 1 for the largest size, however the voltage drop increases with the largest diameter.
For this reason it is recommended to select the tightest allowed cable size.
The Voltage Drop per1000 feet (Line losses) is determined from the chart (Appendix B.4.a)
The table below shows the line losses estimation.
Table III- 11: Line losses per 1000 ft calculation
Well name Cherouq1 Shaheen1 Badr6
Amperage(am) 77 77 77
Line Losses
(Volt/1000)
43.33 43.33 43.33
From the chart the voltage drop through cable is identified in the table below, those values
were taken for a temperature of 77°F,so a simple multiplication by a correction factor must be
done to take into account this difference (Appendix B.4.b).[3][8]
The table below shows the temperature correction factor estimation.
Table III- 12: Temperature correction factor estimation
Well name Cherouq1 Shaheen1 Badr6
Bottom-hole
temperature (°F)
197 198 195.8
Temperature
Correction Factor
1.27 1.26 1.25
B)Cable length
The total cable length should be at least 100ft (30m) longer than the measured pump
setting depth in order to make surface connections at safe distance from the wellhead.
To avoid the possibility of low voltage starts the cable length shall not exceed a maximum
value in order to skip a high cable voltage drop.[8]
The length of cable is the sum of the pump setting depth and at least additive safety length
equal to 100 feet.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-62-320.jpg)
![54
𝑉𝑜𝑙𝑡𝑎𝑔𝑒 𝐷𝑟𝑜𝑝 = 𝐿𝑖𝑛𝑒 𝐿𝑜𝑠𝑠𝑒𝑠 × 𝑇𝑒𝑚𝑝𝑒𝑟𝑎𝑡𝑢𝑟𝑒 𝐶𝑜𝑟𝑟𝑒𝑐𝑡𝑖𝑜𝑛 𝐹𝑎𝑐𝑡𝑜𝑟 III.36
The table below shows the voltage drop per 1000 feet calculation.
Table III- 13: Voltage drop per 1000 ft calculation
Well name Cherouq1 Shaheen1 Badr6
Line Losses
(Volt/1000)
43.33 43.33 43.33
Temperature
Correction Factor
1.27 1.26 1.25
Voltage
Drop(Volt/1000)
55.029 54.595 54.163
If we assume a surface cable length to of 100 ft.
𝑇𝑜𝑡𝑎𝑙 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 𝐷𝑟𝑜𝑝 =
(𝑣𝑜𝑙𝑡𝑎𝑔𝑒 𝑑𝑟𝑜𝑝)×𝑙𝑒𝑛𝑔𝑡ℎ 𝑜𝑓 𝑐𝑎𝑏𝑙𝑒
1000
III.36
where 𝑙𝑒𝑛𝑔𝑡ℎ 𝑜𝑓 𝑐𝑎𝑏𝑙𝑒 = 𝑃𝑢𝑚𝑝 𝑆𝑒𝑡𝑡𝑖𝑛𝑔 𝐷𝑒𝑝𝑡ℎ + 𝑆𝑢𝑟𝑓𝑎𝑐𝑒 𝐶𝑎𝑏𝑙𝑒 III.37
The table below shows the total voltage drop calculation.
Table III- 14: Total voltage drop calculation
Well name Cherouq1 Shaheen1 Badr6
Pump Setting
Depth(ft)
10170.48 10170.48 10170.48
Surface Cable
length(ft)
100 100 100
Total Cable
Length(ft)
10270.48 10270.48 10270.48
Voltage
Drop(Volt/1000)
55.029 54.595 54.163
Total Voltage
Drop(Volt)
565.175 560.717 556.28
At the selected motor amperage and given down-hole temperature, the selection of a cable
size that will give a voltage drop of less than 30 volts per 1,000 ft. is usually recommended to
insure current carrying capability of cable.[3][8]
If the voltage drop is too low the starting torque may result in shaft breakage. Consider
using a VSD if the nameplate voltage drop is less than 5% (see equation III.38 in the next
page).[3][8]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-63-320.jpg)
![55
Applying these rules while selection:
Total Voltage Drop/1000 ft < 30 V/1000 ft (better selection).
Nameplate Voltage Drop
𝑁𝑎𝑚𝑒𝑝𝑙𝑎𝑡𝑒 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 𝐷𝑟𝑜𝑝 =
𝑇𝑜𝑡𝑎𝑙 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 𝐷𝑟𝑜𝑝
𝑀𝑜𝑡𝑜𝑟 𝑉𝑜𝑙𝑡𝑎𝑔𝑒
III.38
The table below shows the Motor nameplate voltage drop calculation.
Table III- 15: Motor nameplate voltage drop calculation
Well name Cherouq1 Shaheen1 Badr6
Total Voltage
Drop(V)
565.175 560.717 556.28
Motor Voltage(V) 2758 2066 2758
Nameplate Voltage
Drop
20.05 % 27.14 % 20.17 %
#4 AWG conductor is used in our case.
C) Conductor Temperature:
Selection of cable type is primarily based on fluid conditions and operating temperature.
The operating temperature can be determined using (Appendix B.4.c) based on the motor
current and the bottom-hole temperature.[3][8]
The table below shows the operating temperature of the power cable estimated.
Table III- 16: Power cable's operating temperature.
Well name Cherouq1 Shaheen1 Badr6
Bottom-hole
temperature (°F)
197 198 195.8
Current(am)
77 77 77
Conductor
temperature(°F)
260 263 257
All conductor temperatures are below 280°F that's why we choose CENR (Copper Conductor,
EPDM insulation, Nitrile jacket, Both round or flat, armor galvanized) to withstand
temperature requirements (Appendix B.4.d).
D) Insulation KV choice:
Based on the surface voltage requirements, the insulation type is chosen:[3][8]
𝑆𝑢𝑟𝑓𝑎𝑐𝑒 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 = 𝑀𝑜𝑡𝑜𝑟 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 + 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 𝐷𝑟𝑜𝑝 III.39](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-64-320.jpg)
![56
The table below shows the surface voltage calculation
Table III- 17: Surface Voltage calculation
Well name Cherouq1 Shaheen1 Badr6
Total voltage drop
(Volt)
565.175 560.717 556.28
Motor voltage(Volt) 2758 2066 2758
Surface
voltage(Volt)
3323.175 2626.717 3314.28
Baker Hughes manufacturer gives 3KV, 4KV, 5KV options for insulation voltage classified
into 2 artificial lift series [9]:
- Superior Performance (SP) series for sandy wells.
- Extreme Performance (XP) series for corrosive wells.
In our case the SP series is chosen because it provides abrasion protection. Mind that the
surface voltage is above 3KV we should select through 4KV or 5KV option. Our choice is
5KV insulation voltage for more security.
CENR: EPDM (C76243) round cable is our choice for the three wells. Round options is the
suited shape, we will select the round configuration under the reference: CENR (C76243)
with nominal dimension of 1.18. (Appendix B.4.e)
III.1.1.9. Motor controller selection
Our choice is based on two features identifying a transformer or a motor controller which are
voltage and amperage required:[9]
A) voltage
We determine the KVA required for the transformer:
𝐾𝑉𝐴 = (
𝑆𝑢𝑟𝑓𝑎𝑐𝑒 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 × 𝑀𝑜𝑡𝑜𝑟 𝐴𝑚𝑝𝑒𝑟𝑎𝑔𝑒 × √3
1000
)
III.40
We must consider a safety margin of 10% by multiplying the value of KVA by 1.1 in order to
withstand unexpected fluctuations.
𝐾𝑉𝐴 ∗= (
𝑆𝑢𝑟𝑓𝑎𝑐𝑒 𝑉𝑜𝑙𝑡𝑎𝑔𝑒 × 𝑀𝑜𝑡𝑜𝑟 𝐴𝑚𝑝𝑒𝑟𝑎𝑔𝑒 × √3
1000
) × 1.1 III.41
B) Amperage:
Determine step up ratio
𝑆𝑡𝑒𝑝 𝑢𝑝 𝑟𝑎𝑡𝑖𝑜 = (
𝑠𝑢𝑟𝑓𝑎𝑐𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒
480
) III.42
Multiply step up ratio by motor amperage
𝐴𝑚𝑝𝑒𝑟𝑎𝑔𝑒 𝑟𝑒𝑞𝑢𝑖𝑟𝑒𝑑 = 𝑆𝑡𝑒𝑝 𝑢𝑝 𝑟𝑎𝑡𝑖𝑜 × 𝑀𝑜𝑡𝑜𝑟 𝑎𝑚𝑝𝑒𝑟𝑎𝑔𝑒 III.43
We must consider a safety margin of 10% by multiplying the value of Amperage required by
1.1 in order to withstand unexpected fluctuations.](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-65-320.jpg)












![References
[1] HERIOT WATT UNIVERSITY, PRODUCTION TECHNOLOGY I, ,PRODUCTION
DEPARTMENT, 2010
[2] HERIOT WATT UNIVERSITY, PRODUCTION TECHNOLOGY II, PRODUCTION
DEPARTMENT, 2010
[3] BAKER HUGHES CENTRILIFT, SUBMERSIBLE PUMP HAND BOOK NINTH EDITION,
PRODUCTION DEPARTMENT, 2009
[4] SHLUMBERGER, ARIFICIAL LIFT SYSTEMS, PRODUCTION DEPARTMENT, 2008
[5] GABOR TAKACS, ELECTRICAL SUBMERSIBLE PUMP MANUAL: OPERATIONS,
TECHNOLOGY AND MAINTENANCE, PRODUCTION DEPARTMENT, 2009
[6] BAKER HUGHES CENTRILIFT, CENTRILIFT PUMP CURVES, PRODUCTION DEPARTMENT,
2007
[7] GABOR TAKACS, DESIGN AND ANALYSIS OF ESO INSTALLATIONS, PRODUCTION
DEPARTMENT, 2009
[8] BAKER HUGHES CENTRILIFT, CENTRILIFT NINE STEPS FOR ESP DESIGN, PRODUCTION
DEPARTMENT, 2005
[9] BAKER HUGHES CENTRILIFT, BAKER HUGHES ESP TECHNICAL REFERENCE,
PRODUCTION DEPARTMENT, 2011](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-86-320.jpg)



![Appendix B: ESP design
B.1. ESP selection[6]
B.1.a: Performance Series 538P37 Pump[6]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-92-320.jpg)
![B.1.b: Performance Series 538P23 Pump[6]
B.1.c: Performance Series 538G31 Pump[6]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-93-320.jpg)
![B.2.a: 513&538 Series Seal sections[6]
B.2.b: 400 Series Seal sections[6]](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-94-320.jpg)
![B.3.a: 450 SP 200°F Motors.[6]
B.4.a: Voltage drop per 1000 feet of cable](https://image.slidesharecdn.com/54cc694f-9211-45ba-b3cc-df8280d34144-160802153323/85/Omar-Omrane-Final-report-95-320.jpg)