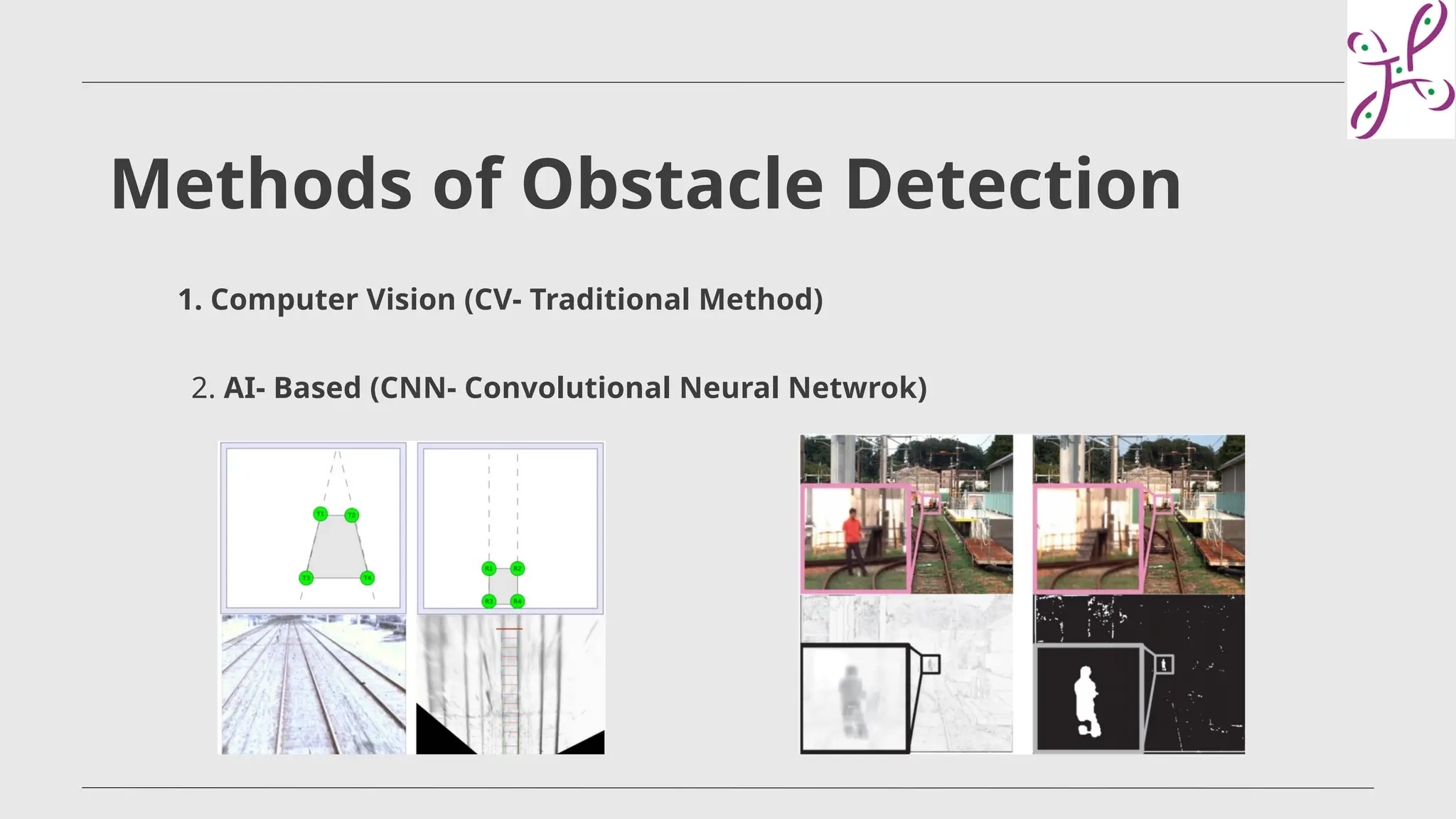
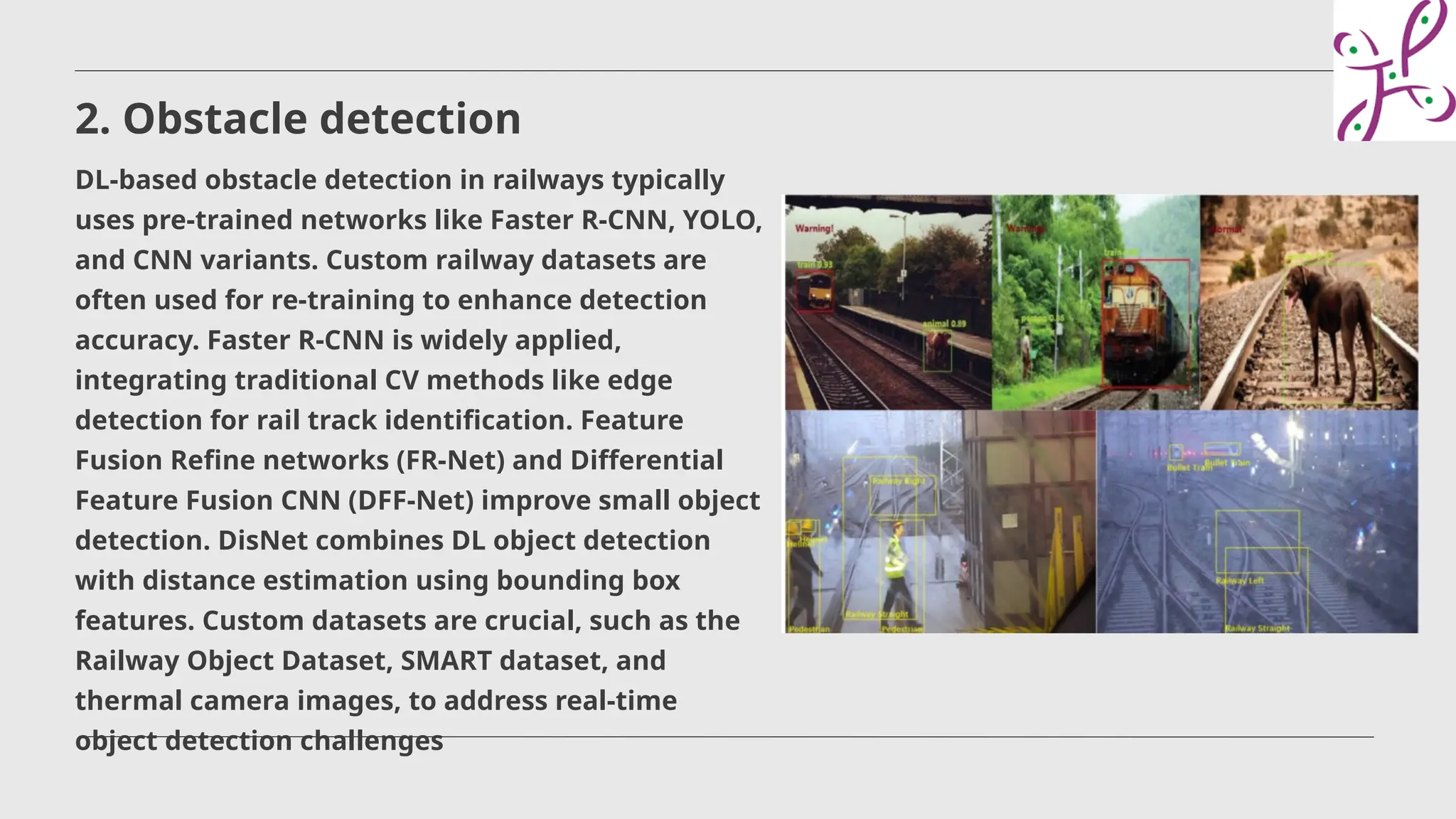
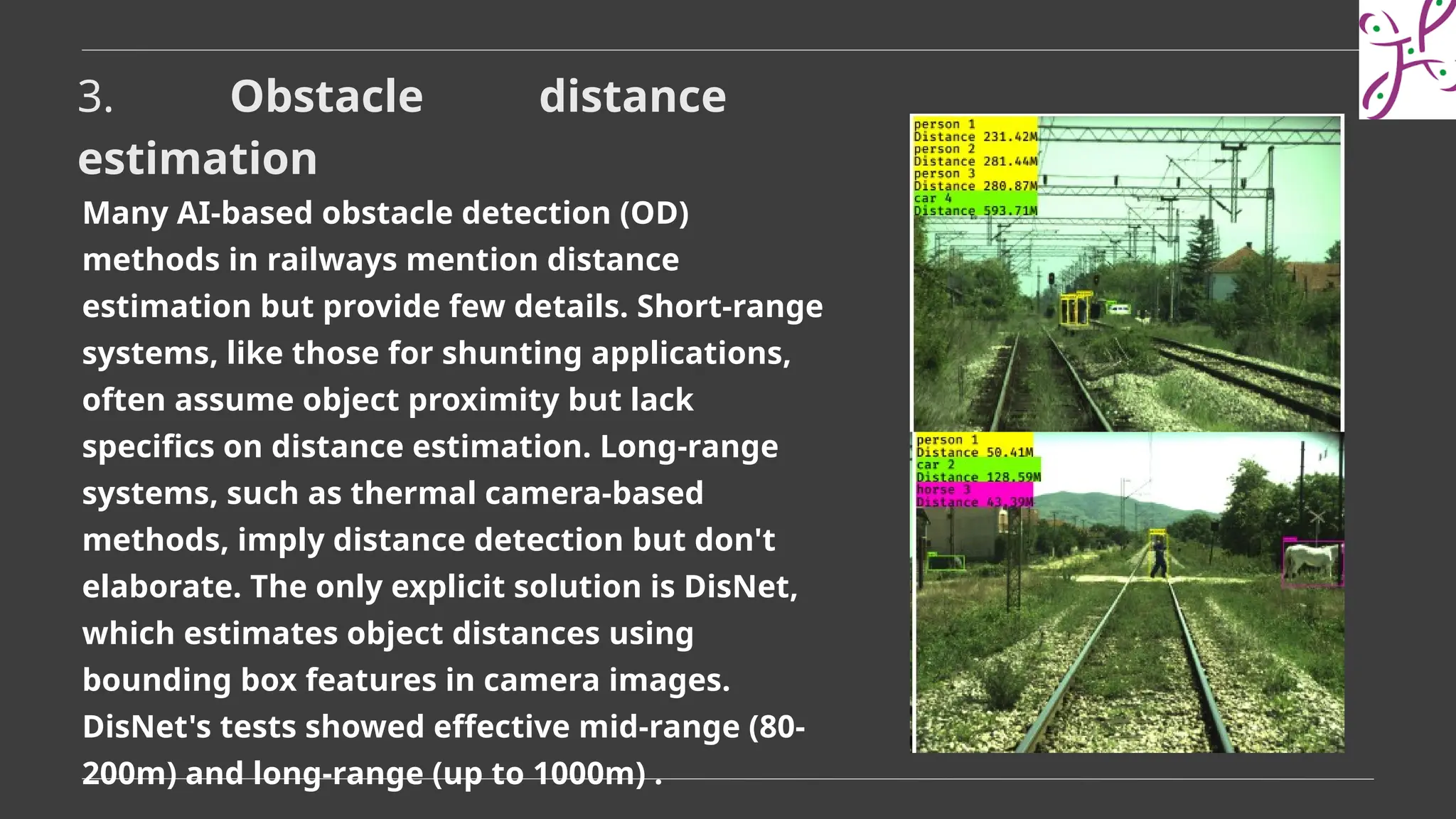
The document discusses vision-based and AI-based methods for railway track and obstacle detection, highlighting advancements in neural network technology, particularly convolutional neural networks (CNNs) and deep learning. It details methods for rail track detection and obstacle detection, emphasizing the importance of custom datasets and the effectiveness of systems like disnet for distance estimation. The findings suggest that AI-driven approaches improve detection accuracy and real-time information delivery for trains, with specific focus on issues like short-range and long-range obstacle detection.