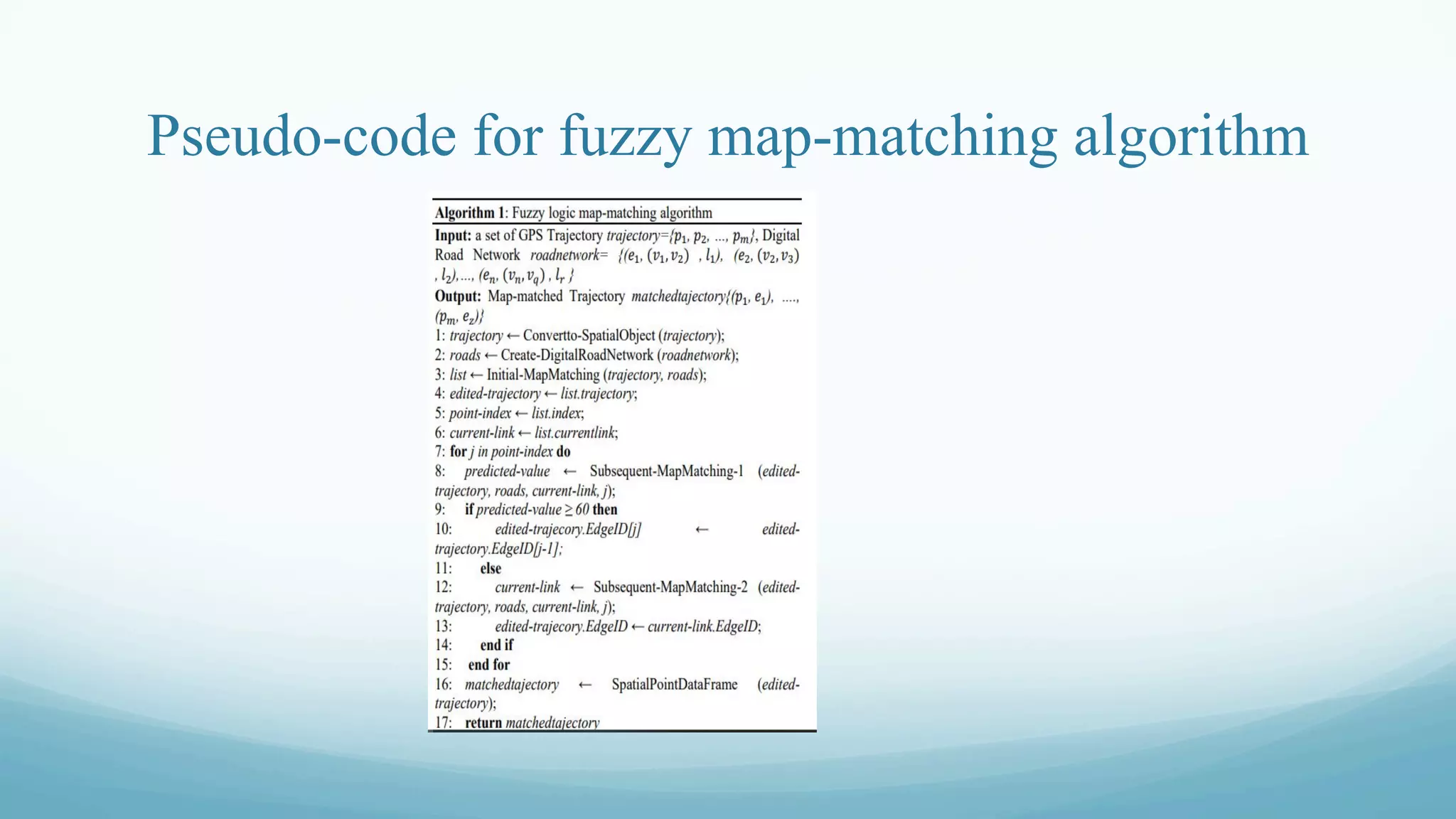
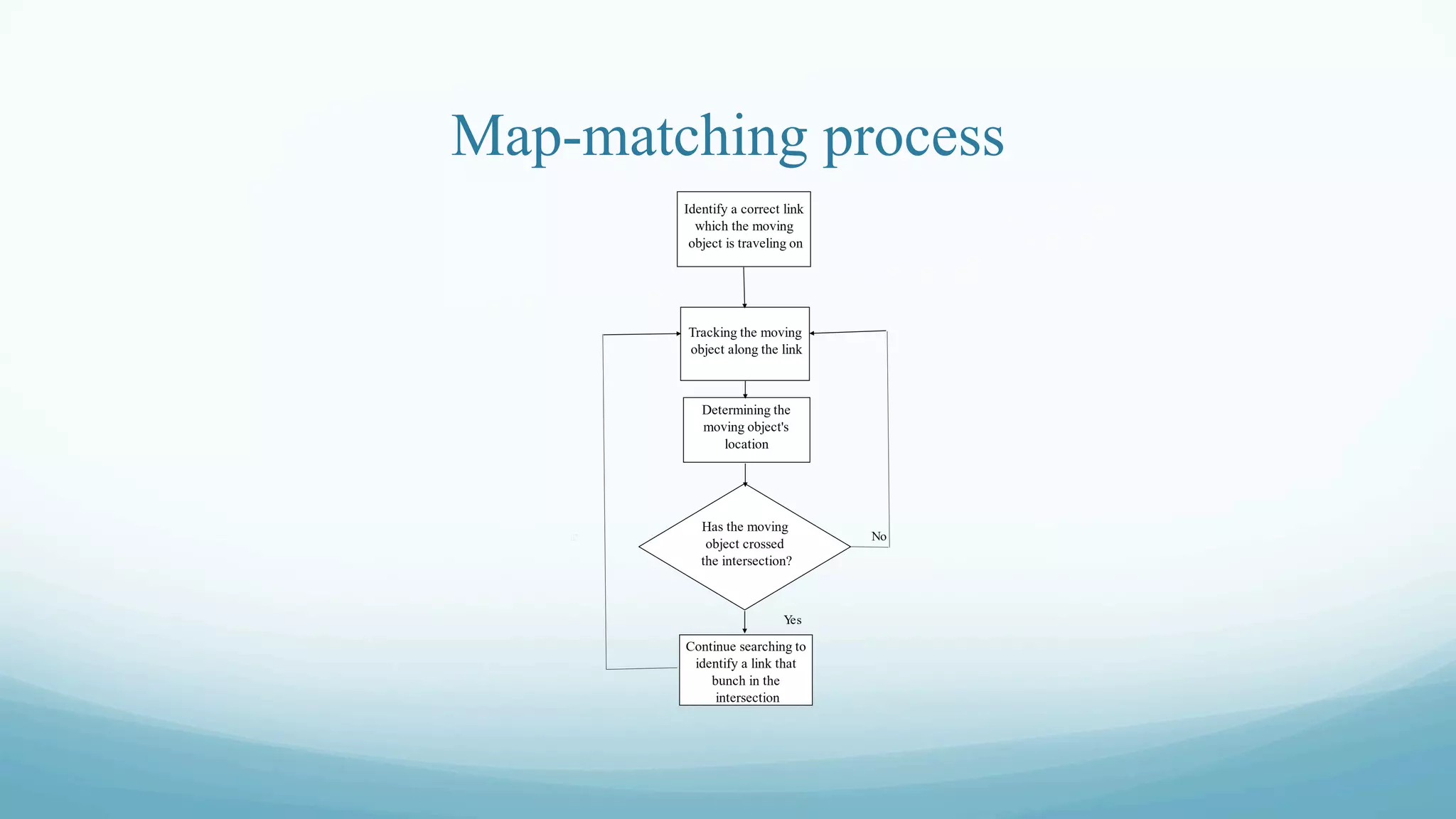
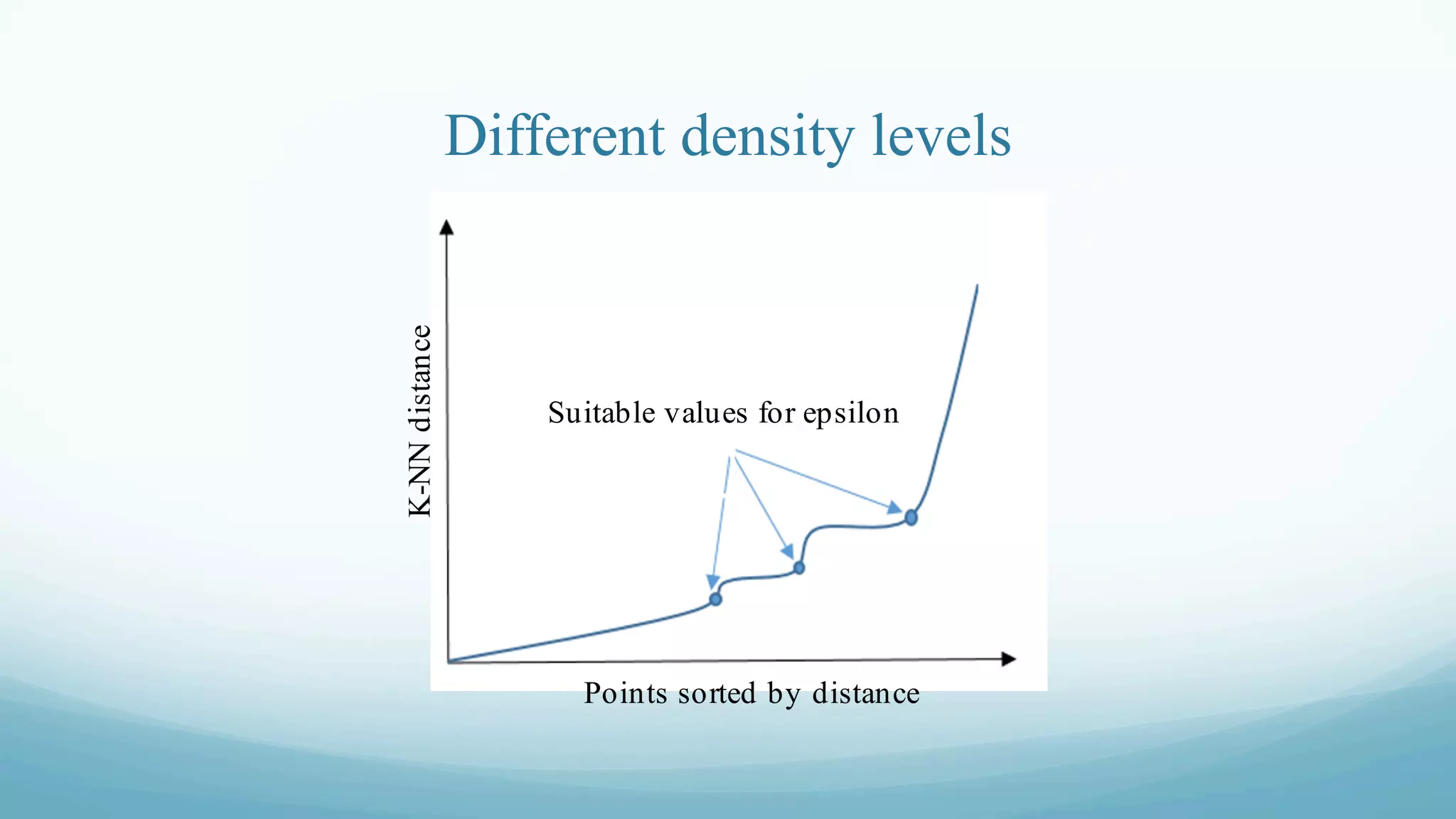
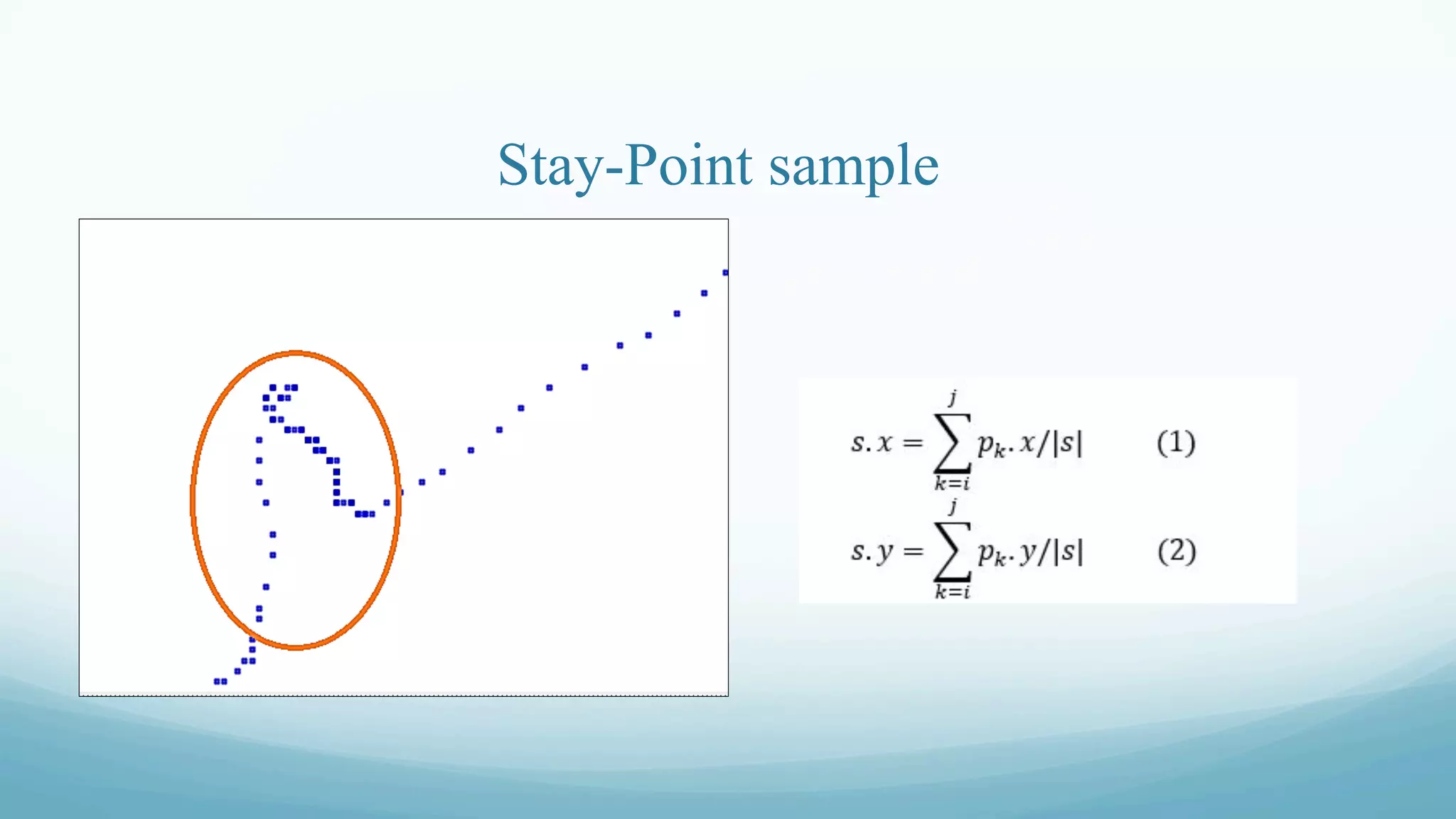
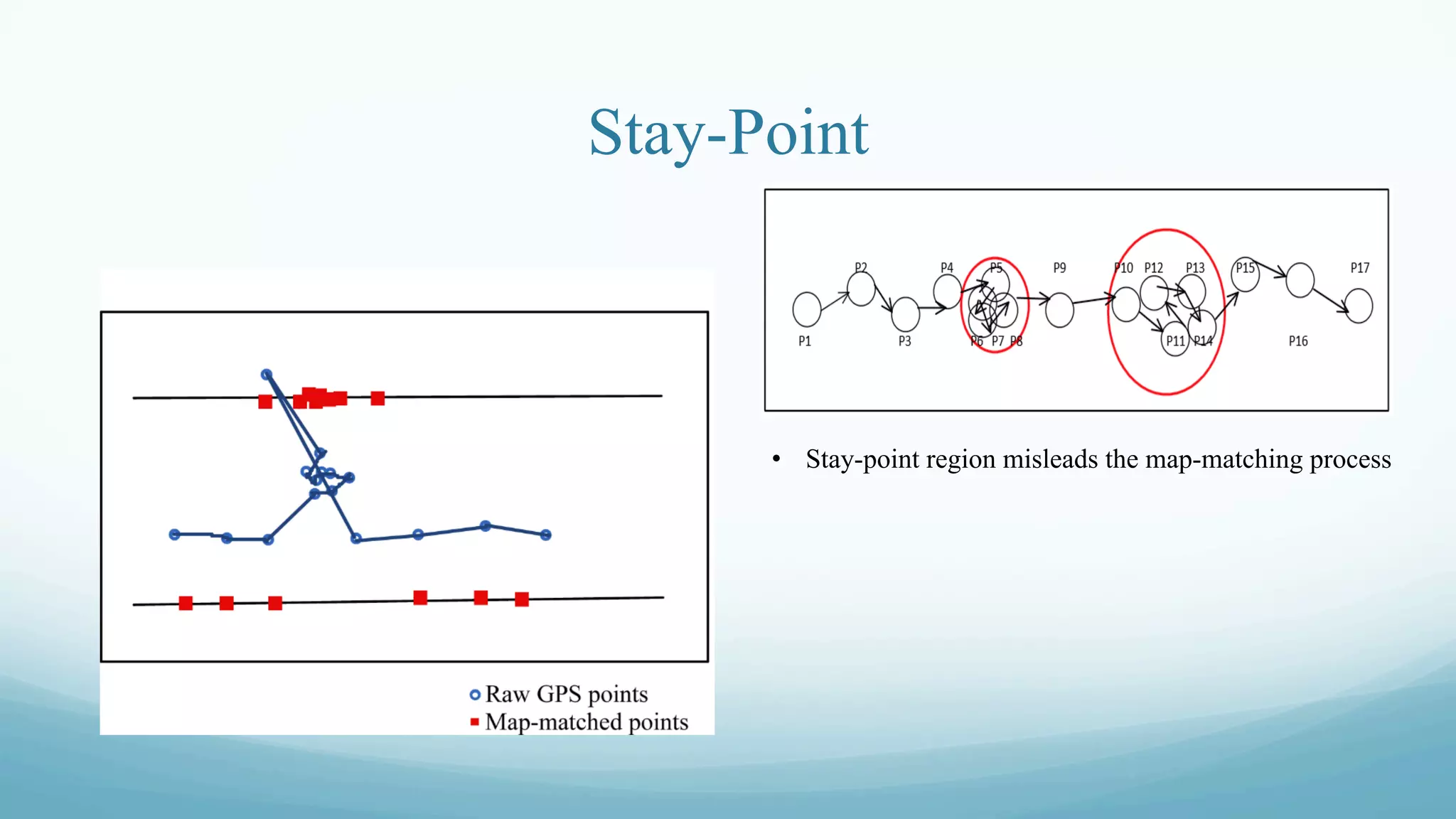
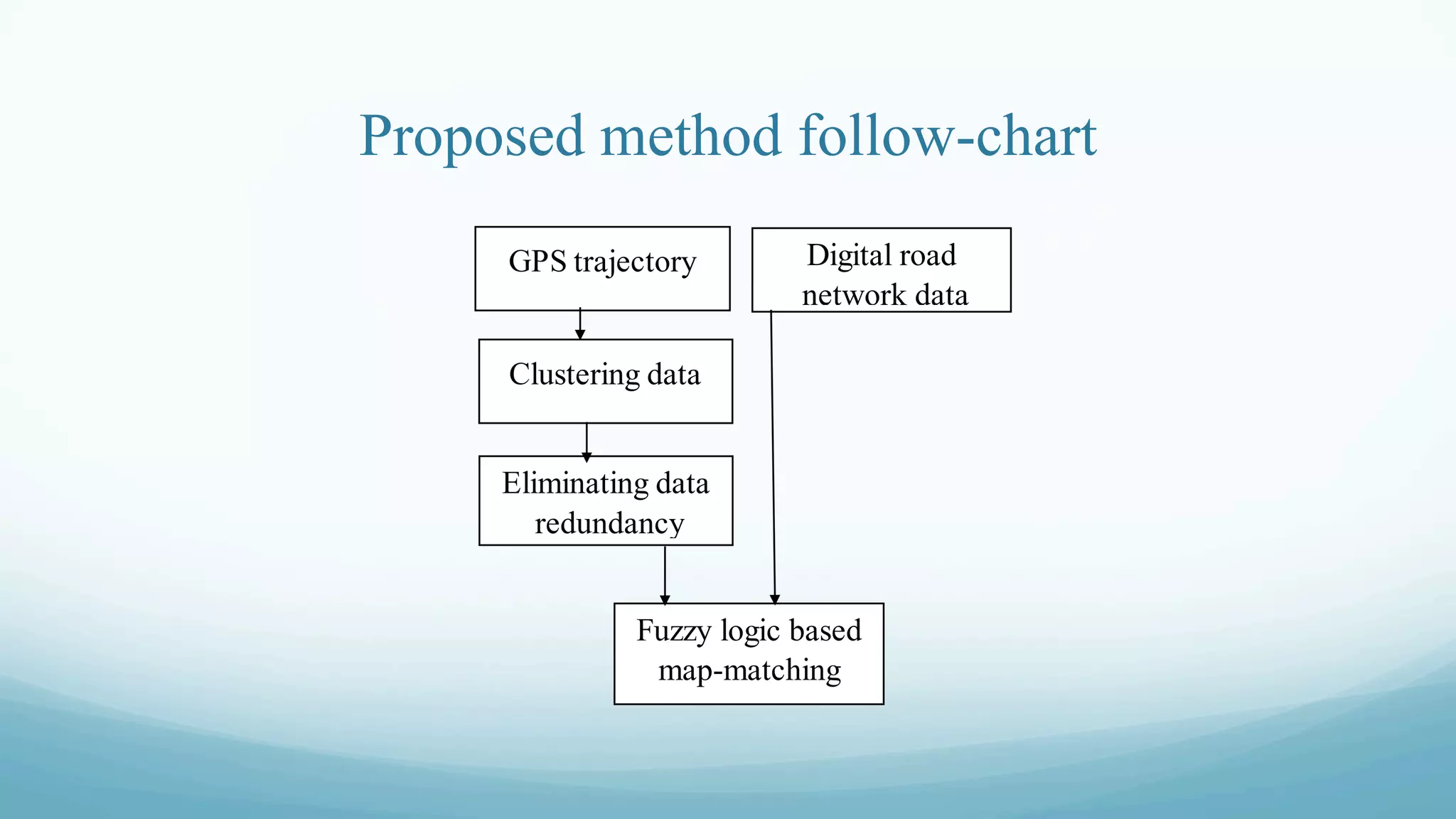
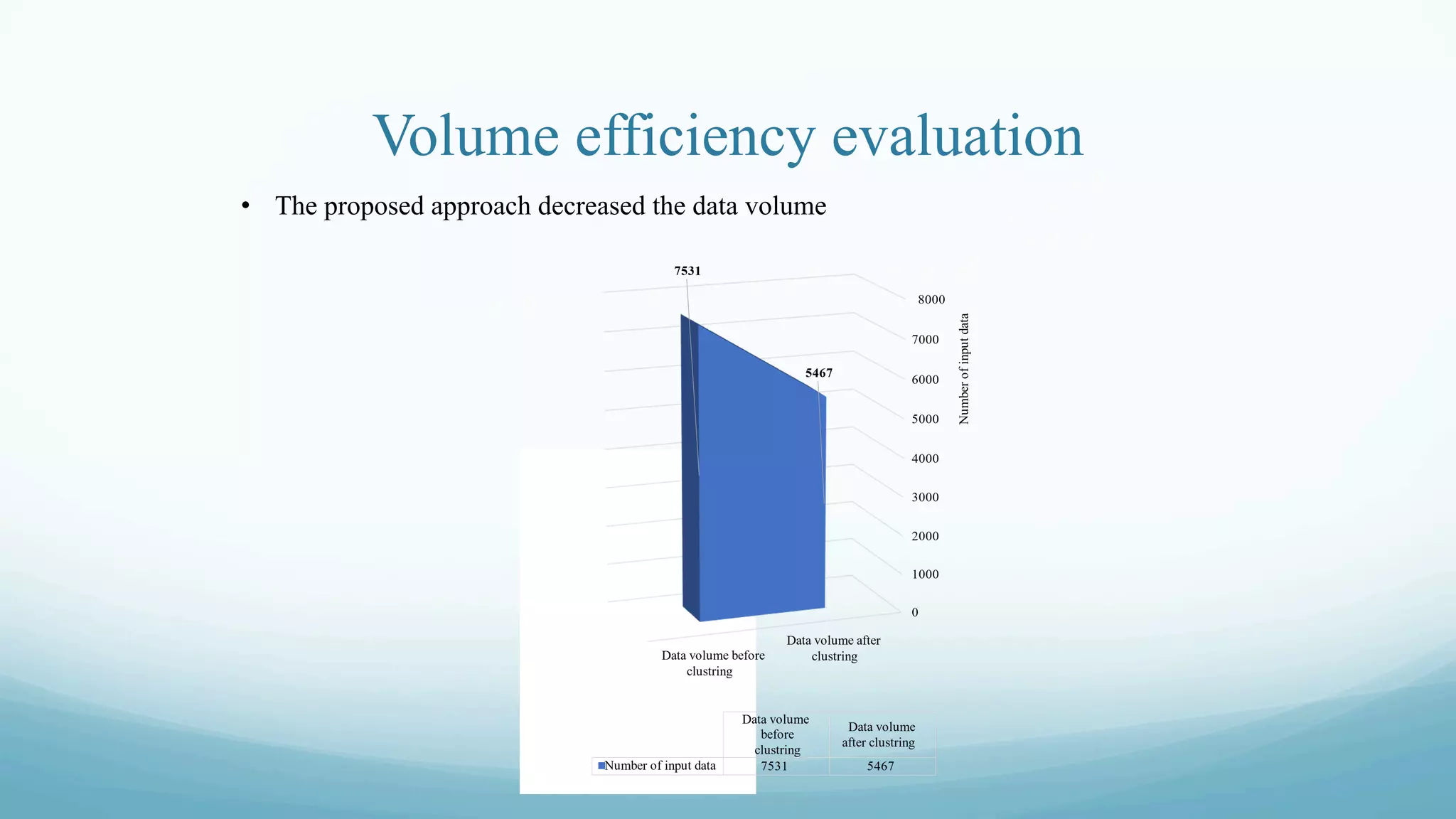
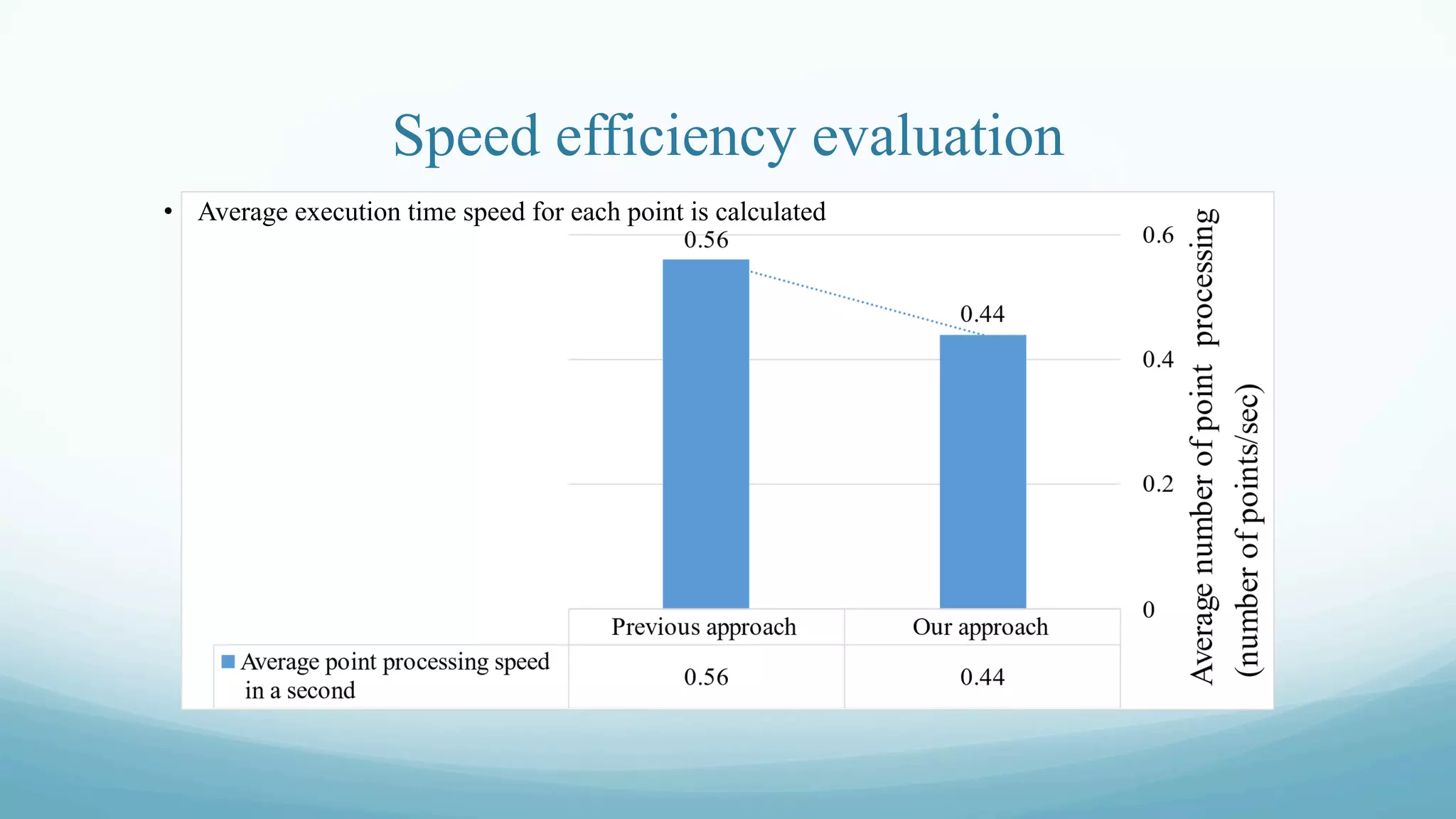
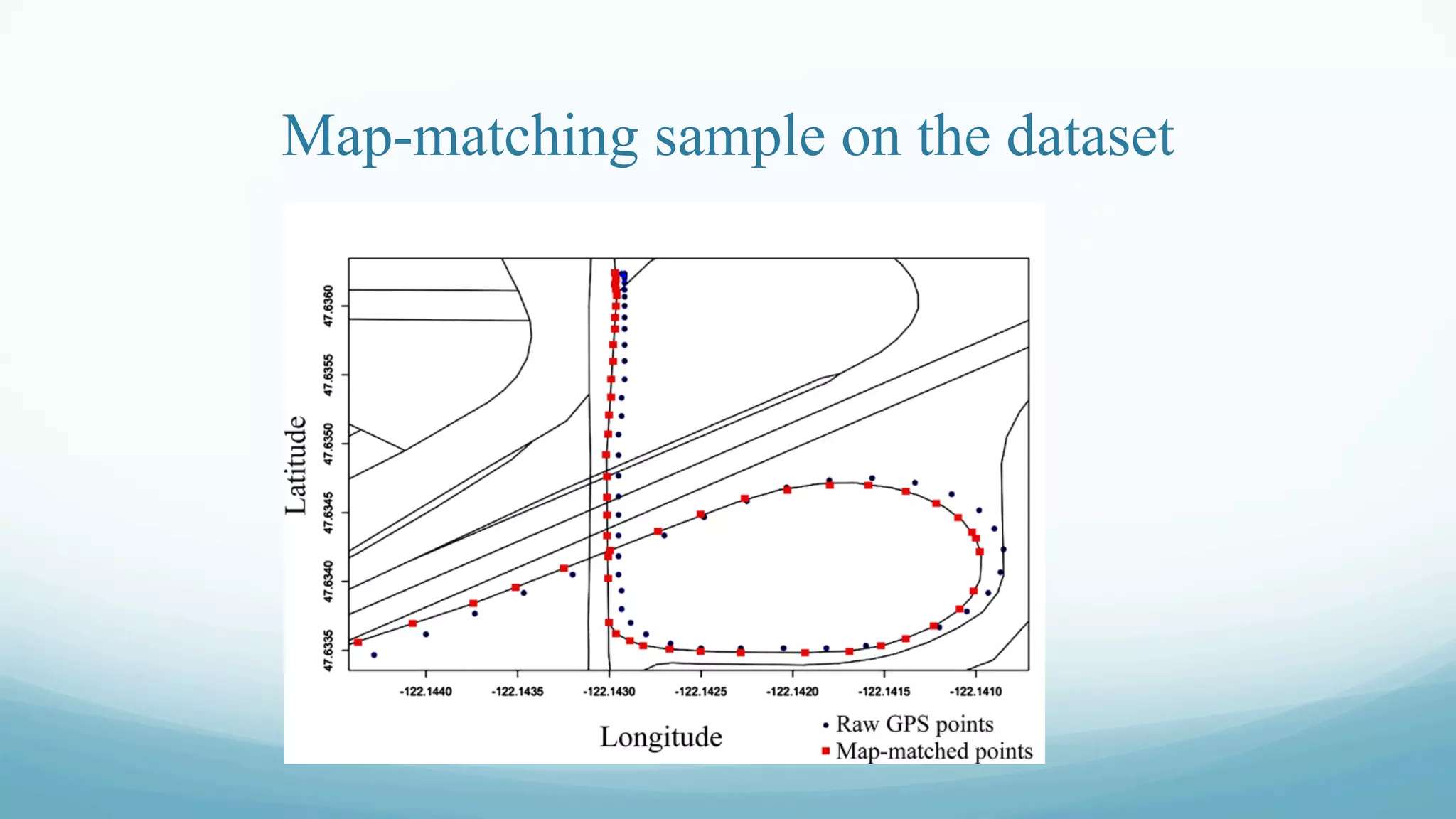
The document discusses improvements to a fuzzy-logic based map-matching method that incorporates trajectory stay-point detection to address data irregularities in vehicle GPS datasets. It evaluates the algorithm's accuracy and efficiency by analyzing the processing time and the number of correct links identified within several mapped trajectories. Key findings demonstrate that the proposed approach enhances the reliability and speed of map-matching compared to previous methods.
![References
— [1] Jafarlou, Minoo, Omid Mahdi Ebadati E, and Hassan Naderi. "Improving Fuzzy-Logic based Map-
Matching Method with Trajectory Stay-Point Detection." arXiv e-prints (2022): arXiv-2208.
— [2] Schubert, Erich, et al. "DBSCAN revisited, revisited: why and how you should (still) use DBSCAN." ACM
Transactions on Database Systems (TODS) 42.3 (2017): 1-21.
— [3] Quddus, Mohammed A., Robert B. Noland, and Washington Y. Ochieng. "A high accuracy fuzzy logic
based map matching algorithm for road transport." Journal of Intelligent Transportation Systems 10.3 (2006):
103-115.](https://image.slidesharecdn.com/map-matchingmethodwithtrajectorystay-pointdetection-220822053149-fe3204d1/75/Map-Matching-Method-with-Trajectory-Stay-Point-Detection-pdf-23-2048.jpg)