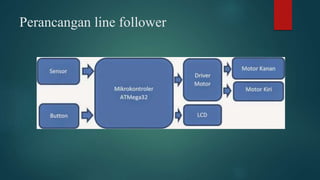
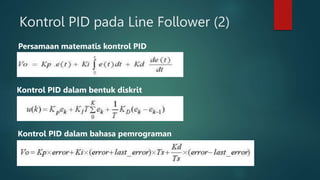
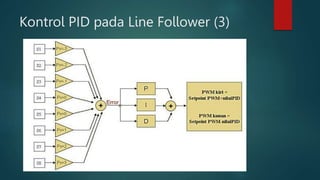
Robot line follower adalah robot mobile yang didesain untuk mendeteksi dan mengikuti garis secara otonom. Robot ini menggunakan sensor, mikrokontroler, driver motor, dan LCD untuk mendeteksi garis dan menggerakkan motor sesuai hasil deteksi sensor. Kontrol PID digunakan untuk mengoptimalkan pergerakan robot dengan mempertimbangkan komponen proporsional, derivatif, dan integratif dari kesalahan posisi robot relatif terhadap garis.