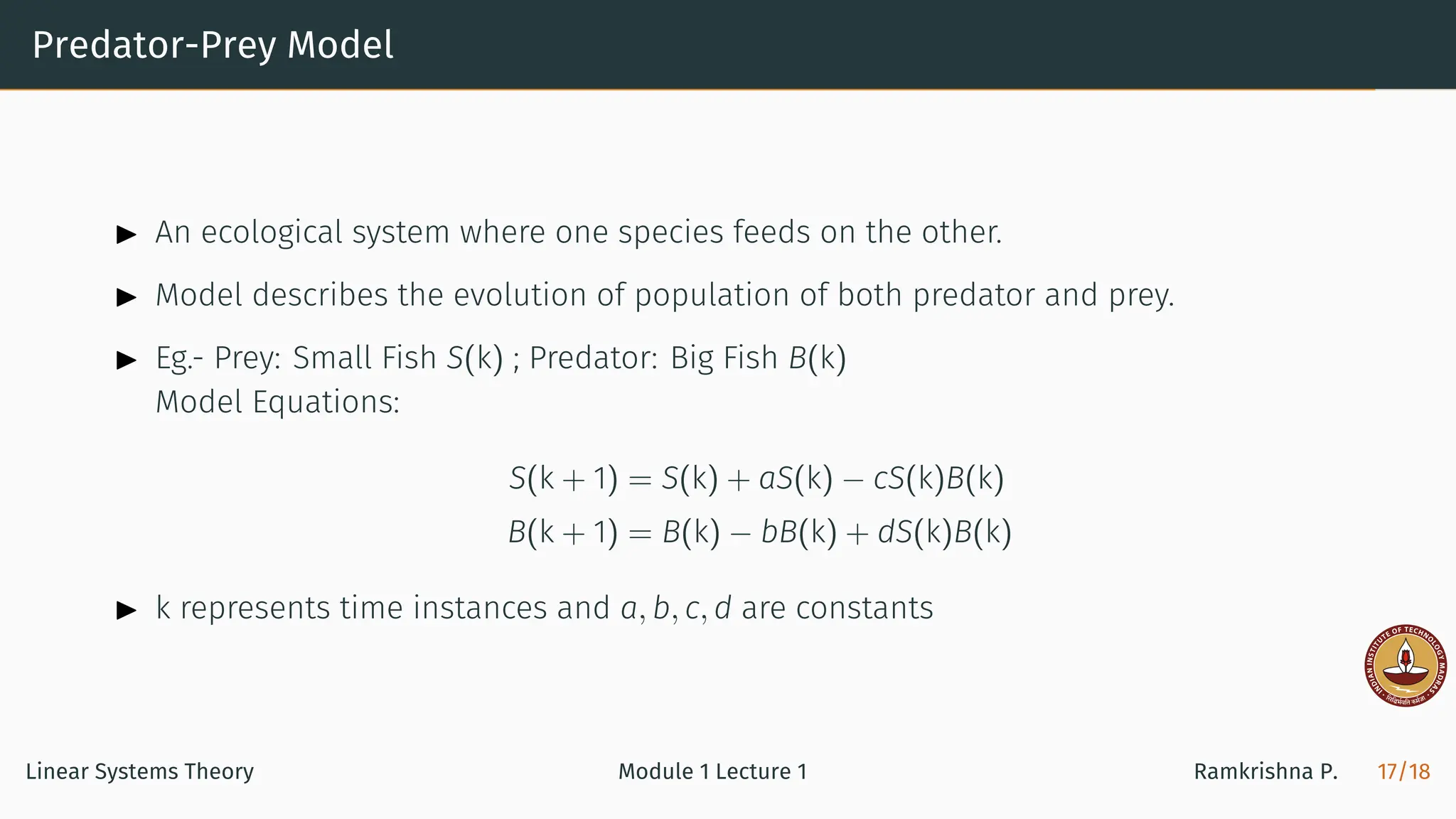
This document provides an introduction to linear systems theory, emphasizing the significance of mathematical models to represent and predict the behavior of dynamic systems. It discusses the key components of modeling, including inductance, mass, and the mass-spring-damper system, offering examples of both mechanical and electrical systems. The document also covers ecological modeling through a predator-prey model, showcasing the oscillatory nature of population dynamics.
![A Simple Mechanical System
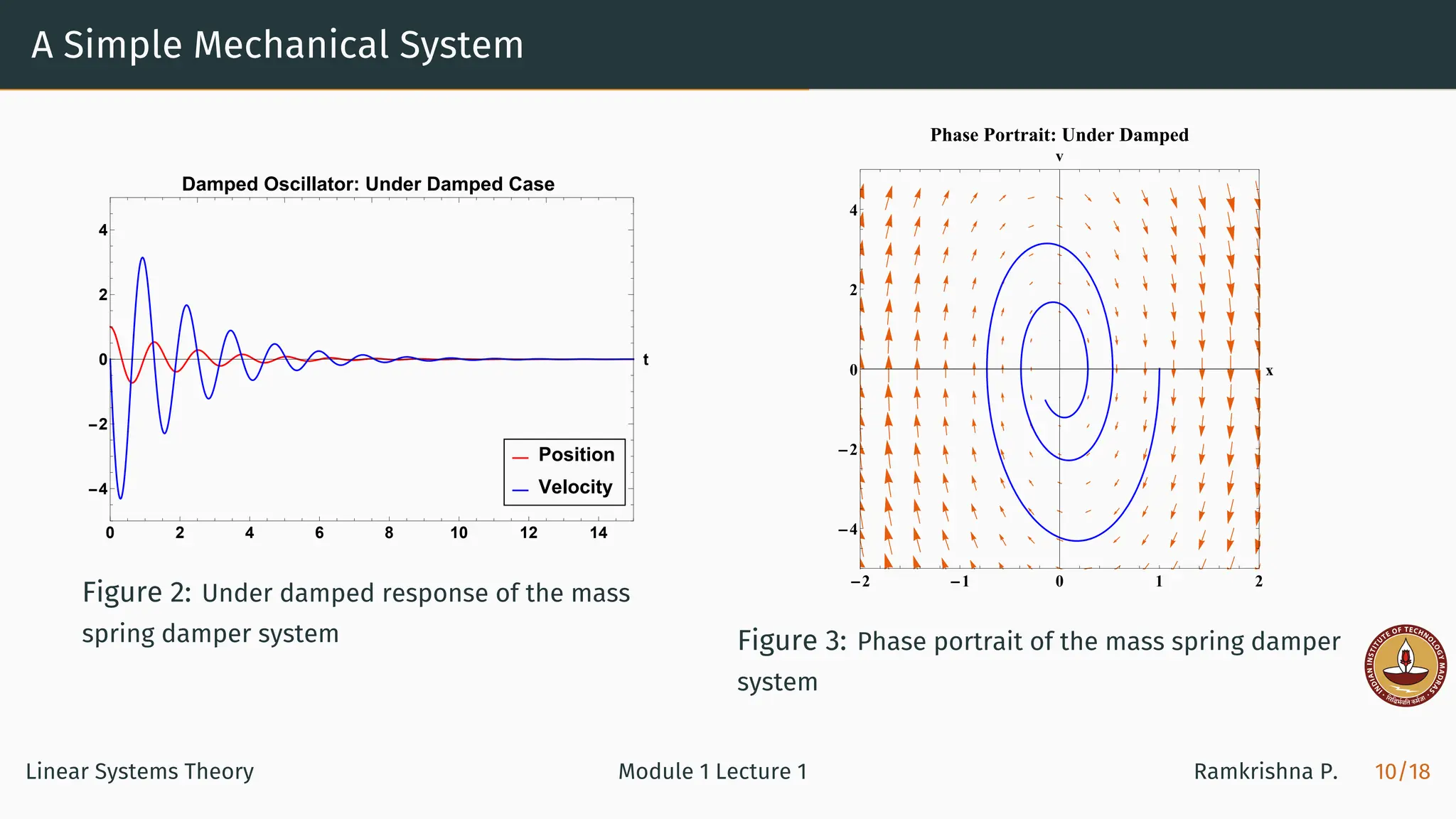
▶ This system can also be written as
x = x1
ẋ1 = x2
ẋ2 = −
d
m
x2 −
k
m
x1
▶ Or in a structured way of the form
[
ẋ1
ẋ2
]
=
[
0 1
− k
m − d
m
]
| {z }
The state matrix A
[
x1
x2
]
|{z}
state vector x
ẋ = Ax
Linear Systems Theory Module 1 Lecture 1 Ramkrishna P. 9/18](https://image.slidesharecdn.com/1llstmod1lec1-240529120658-03ef62f5/75/Linear-control-systems-Automatic-Control-14-2048.jpg)
![A Simple Electrical System
▶ Series RLC Circuit with voltage source
▶ The governing equations of the system are
V = RiL + L
diL
dt
+ vC
iL = C
dvC
dt
▶ Written in the state space form as
[
dvC
dt
diL
dt
]
=
[
0 1
C
−1
L −R
L
]
| {z }
A
[
vC
iL
]
|{z}
x
+
[
0
1
L
]
|{z}
The input matrix B
V (The Control input u)
ẋ = Ax + Bu
Linear Systems Theory Module 1 Lecture 1 Ramkrishna P. 13/18](https://image.slidesharecdn.com/1llstmod1lec1-240529120658-03ef62f5/75/Linear-control-systems-Automatic-Control-18-2048.jpg)
![A Simple Electrical System
Impulse Response
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Time [s]
-1
0
1
2
3
4
5
Current
[A]
10-5 Current for Impulse Input
Figure 8: Current through the RLC circuit
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Time [s]
-0.5
0
0.5
1
1.5
2
2.5
Voltage
[V]
10-3 Voltage across Capacitor for Impulse Input
Figure 9: Voltage across the capacitor
Linear Systems Theory Module 1 Lecture 1 Ramkrishna P. 14/18](https://image.slidesharecdn.com/1llstmod1lec1-240529120658-03ef62f5/75/Linear-control-systems-Automatic-Control-19-2048.jpg)
![A Simple Electrical System
Step Response
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Time [s]
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
Current
[A]
10-3 Current for Step Input
Figure 10: Current through the RLC circuit
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
Time [s]
0
0.2
0.4
0.6
0.8
1
1.2
Voltage
[V]
Voltage across Capacitor for Step Input
Figure 11: Voltage across the capacitor
Linear Systems Theory Module 1 Lecture 1 Ramkrishna P. 15/18](https://image.slidesharecdn.com/1llstmod1lec1-240529120658-03ef62f5/75/Linear-control-systems-Automatic-Control-20-2048.jpg)
![A Simple Electrical System
Response to Sinusoidal Input
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Time [s]
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Current
[A]
10-4 Current for Sinusoidal Input
Figure 12: Current through the RLC circuit
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Time [s]
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Voltage
[V]
Voltage across Capacitor for Sinusoidal Input
Figure 13: Voltage across the capacitor
Linear Systems Theory Module 1 Lecture 1 Ramkrishna P. 16/18](https://image.slidesharecdn.com/1llstmod1lec1-240529120658-03ef62f5/75/Linear-control-systems-Automatic-Control-21-2048.jpg)