Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
UR
Uploaded by
uzziel avila ramon
50 views
Libro6 tareahoja3
Tarea
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 1
More Related Content
XLSX
Tercero.xls
by
DAIHANA GUTIERREZ
XLS
Tercero.xsl
by
nicolas rubiano
PDF
Campaña rcn
by
angelesw187
PPTX
Finished children book
by
Joe Young
PDF
ECE GATE COACHING IN DELHI ENGINEERS SUCCESS
by
esneharawat
PPT
Hansen aise im ch04
by
Daeng Aiman
PPTX
Final magazine pages
by
sam hill
PDF
ds-tibco-nimbus
by
Monte Lim, MPP
Tercero.xls
by
DAIHANA GUTIERREZ
Tercero.xsl
by
nicolas rubiano
Campaña rcn
by
angelesw187
Finished children book
by
Joe Young
ECE GATE COACHING IN DELHI ENGINEERS SUCCESS
by
esneharawat
Hansen aise im ch04
by
Daeng Aiman
Final magazine pages
by
sam hill
ds-tibco-nimbus
by
Monte Lim, MPP
Viewers also liked
PDF
Was ist ein Geschäftsmodell
by
Jan Schmiedgen
PDF
Alternanza scuola lavoro ite casarano
by
itecasarano
PPT
Hansen aise im ch14
by
Daeng Aiman
DOCX
De un sueño a un cuento.
by
Ivonne Barnard
DOC
Hemant_Experience
by
Hemant Bairagi
DOCX
Rubrica 2
by
Yolotzin Sánchez
PPTX
Eled465 decision makingpres
by
jordanjohnson965
PPT
День открытых дверей 2016
by
Валерий Мусинов
PDF
Buyer Persona Best Practices by Joshua Feinberg, HubSpot Accredited Trainer
by
Boca Raton HubSpot User Group
PPT
опорная школа 2015
by
Валерий Мусинов
DOCX
estrategias de búsqueda y manejo de la información en internet
by
Katya Paola Encontra
PDF
FulltextA novel design process of low cost 3D printed ambidextrous finger des...
by
Mashood Mukhtar
PDF
Optimizacion costes en centros fitness
by
JORDI VIÑAS FORT
Was ist ein Geschäftsmodell
by
Jan Schmiedgen
Alternanza scuola lavoro ite casarano
by
itecasarano
Hansen aise im ch14
by
Daeng Aiman
De un sueño a un cuento.
by
Ivonne Barnard
Hemant_Experience
by
Hemant Bairagi
Rubrica 2
by
Yolotzin Sánchez
Eled465 decision makingpres
by
jordanjohnson965
День открытых дверей 2016
by
Валерий Мусинов
Buyer Persona Best Practices by Joshua Feinberg, HubSpot Accredited Trainer
by
Boca Raton HubSpot User Group
опорная школа 2015
by
Валерий Мусинов
estrategias de búsqueda y manejo de la información en internet
by
Katya Paola Encontra
FulltextA novel design process of low cost 3D printed ambidextrous finger des...
by
Mashood Mukhtar
Optimizacion costes en centros fitness
by
JORDI VIÑAS FORT
More from uzziel avila ramon
PDF
Libro 7hoja3
by
uzziel avila ramon
DOCX
Cartas
by
uzziel avila ramon
DOCX
Tareas de herramientas
by
uzziel avila ramon
DOCX
Carta3
by
uzziel avila ramon
DOCX
Carta 2
by
uzziel avila ramon
PDF
Libro1
by
uzziel avila ramon
PDF
Libro3
by
uzziel avila ramon
PDF
Libro5hoja1
by
uzziel avila ramon
PDF
Libro4hoja2
by
uzziel avila ramon
PDF
Libro 7hoja4
by
uzziel avila ramon
PDF
Libro6 tareahoja1
by
uzziel avila ramon
PDF
Libro 7hoja1
by
uzziel avila ramon
PDF
Promedio libro2
by
uzziel avila ramon
PDF
Libro6 tareahoja2
by
uzziel avila ramon
PDF
Libro 7hoja2
by
uzziel avila ramon
PDF
Libro5hoja3
by
uzziel avila ramon
PDF
Libro2
by
uzziel avila ramon
PDF
Libro5hoja2
by
uzziel avila ramon
Libro 7hoja3
by
uzziel avila ramon
Cartas
by
uzziel avila ramon
Tareas de herramientas
by
uzziel avila ramon
Carta3
by
uzziel avila ramon
Carta 2
by
uzziel avila ramon
Libro1
by
uzziel avila ramon
Libro3
by
uzziel avila ramon
Libro5hoja1
by
uzziel avila ramon
Libro4hoja2
by
uzziel avila ramon
Libro 7hoja4
by
uzziel avila ramon
Libro6 tareahoja1
by
uzziel avila ramon
Libro 7hoja1
by
uzziel avila ramon
Promedio libro2
by
uzziel avila ramon
Libro6 tareahoja2
by
uzziel avila ramon
Libro 7hoja2
by
uzziel avila ramon
Libro5hoja3
by
uzziel avila ramon
Libro2
by
uzziel avila ramon
Libro5hoja2
by
uzziel avila ramon
Libro6 tareahoja3
1.
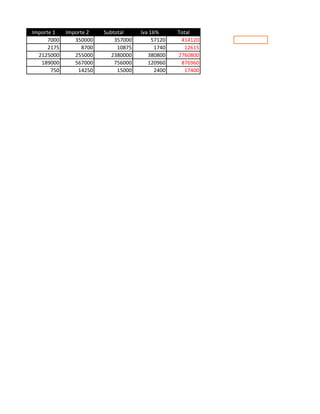
Importe 1 Importe
2 Subtotal Iva 16% Total 7000 350000 357000 57120 414120 2175 8700 10875 1740 12615 2125000 255000 2380000 380800 2760800 189000 567000 756000 120960 876960 750 14250 15000 2400 17400
Download