RAKENNA ROBOTTI
• Rakennakahden mottorin yleisrobotti, jossa on alaspäin
osoittava valosensori sekä eteenpäin osoittava
ultraäänisensori (kosketussensori on myös kätevä)
• Tässä rakennusohjeita, joita voit käyttää:
• Lego Educator
• Asimov-robotti (ohjeet sivuilla 18-36 ja 112)
3.
AJATTELUN TAIDOT
• Robotinsisällä on pieni tietokone, joka ei osaa tehdä mitään älykästä ennen kuin sille annetaan ohjeet eli koodi
• Jotta robotti ei törmää seiniin, sillä on sensorit (aistit) joiden avulla se voi esim. huomata esteitä
• Robotti liikkuu moottoreiden avulla, moottorit voivat pyöriä eteenpäin tai taaksepäin, moottorin voi pistää päälle
tai pois päältä, se voi pyöriä hitaasti tai nopeasti (miten käännytään?)
• Moottorit tarvitsevat sähköä toimiakseen, siksi robotissa on akku
• Robotin sensoreiden toiminnan voi ymmärtää fysiikan ilmiöiden kautta:
• Ultraäänisensori toimii kuin lepakko tai kaikuluotain
• Valosensori perustuu siihen miten eri väriset pinnat heijastavat valoa
• Tieto ja käskyt siirtyvät johtoja pitkin (toimii kuin hermosto)
EV3 OHJELMOINTI
• Graafinenohjelmointiympäristö tietokoneelle (Win ja Mac)
• Home Edition (ilmainen), sisältää rakennusohjeet Home Edition sarjan roboteille
• Education Edition (ilmainen), sisältää rakennusohjeet Eduction sarjan roboteille sekä tuen fysiikan
laboratoriomittauksille
• Graafinen ohjelmointiympäristö iPadille (ilmainen) ja Androidille (ilmainen)
• Etuna se, että oppilaat voivat liikkua vapaasti robotin kanssa, robotin ohjelman muuttaminen käy
nopeasti ja kätevästi Bluetooth-yhteyden yli
• Yksinkertaisempi (rajoitetumpi) ohjelma ja siksi helppokäyttöisempi pienempien oppilaiden kanssa
• Tallentaa automaattisesti, tunnistaa sensorit ja moottorit automaattisesti (jos yhteys on ok)
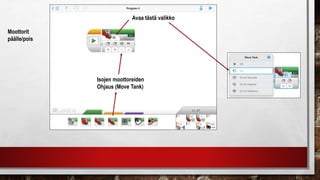
Isojen moottoreiden
Ohjaus (MoveTank)
Robotin
Liikkuminen
Eteenpäin
Säädä kuinka monta
kierrosta moottorit
pyörivät. Voit käyttää myös
desimaalilukuja.
11.
Isojen moottoreiden
Ohjaus (MoveTank)
Robotin
Liikkuminen
Taaksepäin
Avaa tästä liukukytkin
moottorin teholle.
Avaa tästä numpad ja säädä
molemmat arvot negatiivisiksi
(pyörimissuunta vaihtuu).
12.
Isojen moottoreiden
Ohjaus (MoveTank)
Robotin
Kääntäminen
1. tapa
Säädä moottoreille
eri tehot
Käännös oikealle
Käännös vasemmalle
13.
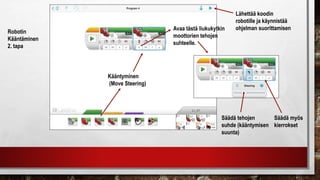
Lähettää koodin
robotille jakäynnistää
ohjelman suorittamisen
Kääntyminen
(Move Steering)
Säädä myös
kierrokset
Robotin
Kääntäminen
2. tapa
Avaa tästä liukukytkin
moottorien tehojen
suhteelle.
Säädä tehojen
suhde (kääntymisen
suunta)
14.
ENSIMMÄINEN HAASTE
• Käytä”Move Tank” (ja/tai ”Move Steering”) lohkoja ja ohjaa robotti kiertämään este esim. penaali ja
palaamaan lähtöviivan taakse (este noin 50-100 cm päässä lähtöviivasta).
https://youtu.be/fQtLB3AGqY0
KOLMAS HAASTE
• Toteutapölynimuri-robotti, joka huomaa seinän, pakittaa,
kääntyy, siirtyy vähän ja kääntyy imuroimaan lisää
• Mieti algoritmi sille miten imuroidaan tehokkaasti
• Mieti mikä on jakso, jota pölynimuri-robotti toistaa ja
sijoita se silmukan sisään
Silmukka
Silmukkaa voi
käyttää myös
niin,että se lopettaa,
kun tietty sensori-
ehto toteutuu
Avaa tästä valikko
Silmukka (Loop)
Säädä
etäisyyttä
Silmukan
lopetusehto
23.
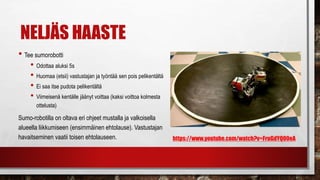
NELJÄS HAASTE
• Kehitäpölynimuriasi
• Paranna imurointitarkkuutta, jokainen kohta lattiasta pitää
saada imuroitua
• Imurin pitää myös osata pysähtyä, kun se on imuroinut
kaiken, tee lopetusehto imurille
https://youtu.be/RgZ7BaOrd-s
24.
Ehtolause
(osa 1)
Avaa tästävalikko
Ehtolause (Switch)
Säädä ehtoon
heijastuneen valon
määrä (musta heijastaa
vähän, < 15)
25.
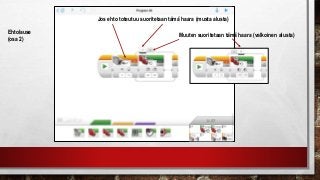
Ehtolause
(osa 2)
Jos ehtototeutuu suoritetaan tämä haara (musta alusta)
Muuten suoritetaan tämä haara (valkoinen alusta)
26.
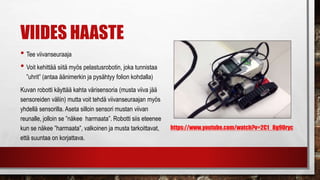
VIIDES HAASTE
• Teesumorobotti
• Odottaa aluksi 5s (tämä voidaan jättää myös pois)
• Huomaa (etsii) vastustajan ja työntää sen pois pelikentältä
• Ei saa itse pudota pelikentältä
• Viimeisenä kentälle jäänyt voittaa (kaksi voittoa kolmesta
ottelusta)
Sumo-robotilla on oltava eri ohjeet mustalla ja valkoisella
alueella liikkumiseen (ensimmäinen ehtolause). Vastustajan
havaitseminen vaatii toisen ehtolauseen. https://www.youtube.com/watch?v=FruGdYQO0eA
KUUDES HAASTE
• Teeviivanseuraaja
Aseta silloin värisensori mustan viivan reunalle, jolloin se
”näkee harmaata”. Robotti siis eteenee kun se näkee
”harmaata”, jos se näkee valkoista tai mustaa se tarkoittaa,
että suuntaa on korjattava. Tarvitset tähän koodiin
sisäkkäisiä ehtolauseita.
• Voit kehittää siitä myös ”pelastusrobotin”, joka tunnistaa
”uhrit” (antaa äänimerkin ja pysähtyy uhrin eli folioteipin
kohdalla) https://youtu.be/7gd2haYkmvo
29.
LISÄPUUHAA: ROBOLOGIC HD- PELI
Ohjaa robotti
oranssiin ruutuun
ja sytytä siihen lamppu
Eteenpäin
Hyppy
Lampun sytytys
Käännös oikealle ja
vasemmalle