Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
sk2940635
PPT, PDF
6 views
Lecture process synchronization ppt how it
How process synchronization occurs
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 20
2
/ 20
3
/ 20
4
/ 20
5
/ 20
6
/ 20
7
/ 20
8
/ 20
9
/ 20
10
/ 20
11
/ 20
12
/ 20
13
/ 20
14
/ 20
15
/ 20
16
/ 20
17
/ 20
18
/ 20
19
/ 20
20
/ 20
More Related Content
PPT
Operating System Process Synchronization
by
harryfletcherlinkbui
PPT
ch05.ppt
by
RohitPaul71
PPT
Process synchonization : operating system ( Btech cse )
by
HimanshuSharma1389
PDF
ch5-process-synchronization. pdf
by
iamayesha2526
PDF
5 process synchronization
by
BaliThorat1
PDF
Operating System Chapter 5 Process Synchronization
by
andrewborre02
PPT
ch5 [Autosaved].ppt
by
monirJihad2
PPT
ch6-1.ppt
by
ssuserc35fa4
Operating System Process Synchronization
by
harryfletcherlinkbui
ch05.ppt
by
RohitPaul71
Process synchonization : operating system ( Btech cse )
by
HimanshuSharma1389
ch5-process-synchronization. pdf
by
iamayesha2526
5 process synchronization
by
BaliThorat1
Operating System Chapter 5 Process Synchronization
by
andrewborre02
ch5 [Autosaved].ppt
by
monirJihad2
ch6-1.ppt
by
ssuserc35fa4
Similar to Lecture process synchronization ppt how it
PPT
Operating System-Process Synchronization
by
bismahmalik22
PPT
ch5.ppt
by
vijay974055
PPT
ch5.ppt
by
karinaabyys
PPT
ch5.ppt operating system
by
Sami Mughal
PDF
ch5-Process_Synchronization.pdf
by
sharada3
PPT
Process Synchronization
by
K Gowsic Gowsic
PPT
chapter5 processes of synchronizatio ppt
by
Abdikani34
PDF
Unit II - 3 - Operating System - Process Synchronization
by
cscarcas
PDF
Process synchronisation. Chapter .......
by
deepikam681248
PPT
PS.ppt
by
DrCMeenakshiVISTAS
PPT
Comsats University Islamabad OS lab 05.pptx
by
hucavaxu
PPTX
process synchronisation operating system
by
codefast
PPT
Lecture#5
by
Adil Alpkoçak
PPT
ch6.ppt
by
MaxJoker2
PPT
operating system process synchronization.ppt
by
NAGESHUB1
PPT
Process synchronization in operating systems
by
anilvarsha1
PDF
Lecture 9.pdfLecture 9.pdfLecture 9.pdfLecture 9.pdf
by
mohammedabomashowrms
PPT
Chapter 5 Networking ddddddddddddddddddd
by
cayewe7787
PPT
Chapter 5 Process Synchronization os.ppt
by
vvsp1
PPT
Process creation and Synchronisation.ppt
by
ShreeVarshini12
Operating System-Process Synchronization
by
bismahmalik22
ch5.ppt
by
vijay974055
ch5.ppt
by
karinaabyys
ch5.ppt operating system
by
Sami Mughal
ch5-Process_Synchronization.pdf
by
sharada3
Process Synchronization
by
K Gowsic Gowsic
chapter5 processes of synchronizatio ppt
by
Abdikani34
Unit II - 3 - Operating System - Process Synchronization
by
cscarcas
Process synchronisation. Chapter .......
by
deepikam681248
PS.ppt
by
DrCMeenakshiVISTAS
Comsats University Islamabad OS lab 05.pptx
by
hucavaxu
process synchronisation operating system
by
codefast
Lecture#5
by
Adil Alpkoçak
ch6.ppt
by
MaxJoker2
operating system process synchronization.ppt
by
NAGESHUB1
Process synchronization in operating systems
by
anilvarsha1
Lecture 9.pdfLecture 9.pdfLecture 9.pdfLecture 9.pdf
by
mohammedabomashowrms
Chapter 5 Networking ddddddddddddddddddd
by
cayewe7787
Chapter 5 Process Synchronization os.ppt
by
vvsp1
Process creation and Synchronisation.ppt
by
ShreeVarshini12
Recently uploaded
PDF
2025-12-06 Overview of Lifting and Hoisting related Standards by Cranes for Y...
by
Cranes For You B.V.
PPTX
Optimized access control techniques in Cloud Computing with Security and Scal...
by
mareswariesteru
PDF
EDIH TRAINING AI FOR COMPANIES: MODULE 4
by
Hristian Daskalov
PDF
10 Tips for Successfully Purchasing Twitter Accounts.pdf
by
marketing
PDF
God series - Physics video office crossed
by
jangidankit8781
PPTX
What TPM Looks Like When You’re Short-Staffed and Still Make It Work | Lean T...
by
MaintWiz Technologies Private Limited
PDF
Chip Designer's Code - Linux Terminal Part 6 - Text Viewers
by
Amr Adel
PDF
(en/zhTW)All_Roads_Lead_to_IPC_DannyJiang
by
Danny Jiang
PPTX
TELECOMMUNICATION FOR SOCIETY to all over
by
madagonikranthikumar
PDF
Fluid Mechanics, Heat Transfer, and Mass Transfer_ Chemical Engineering Pract...
by
nikptl09
PPTX
Top 3 winning teams announcement - TechSprint
by
bajpaitusharoffon678
PDF
Basic Thumb rule For switchgear Selection
by
Vimal Kr
PDF
ERTMS-conference-WS8_Presentations_v0.pdf
by
Eduardo147194
PPTX
Electronics Device - EC25C01 - Semiconductor: Types, Conductivity,
by
Mathavan N
PDF
Day 01- Basic Knowledge for LPG system design.pdf
by
kmas1612
PDF
Chris Elwell Woburn - An Experienced IT Executive
by
Chris Elwell Woburn
PDF
Chip Designer's Code - Linux Terminal Part 7.1 - Text Processing
by
Amr Adel
PDF
PROPOSED 5 BEDROOM DUPLEX DEVELOPMENT DRAWINGS..pdf
by
jamessylvester167
PPTX
The Half-Life of Preventive Maintenance: Why PM Compliance Fails & How to Res...
by
MaintWiz Technologies Private Limited
PDF
generative ai and prompt Engineering with out put images.pdf
by
info839249
2025-12-06 Overview of Lifting and Hoisting related Standards by Cranes for Y...
by
Cranes For You B.V.
Optimized access control techniques in Cloud Computing with Security and Scal...
by
mareswariesteru
EDIH TRAINING AI FOR COMPANIES: MODULE 4
by
Hristian Daskalov
10 Tips for Successfully Purchasing Twitter Accounts.pdf
by
marketing
God series - Physics video office crossed
by
jangidankit8781
What TPM Looks Like When You’re Short-Staffed and Still Make It Work | Lean T...
by
MaintWiz Technologies Private Limited
Chip Designer's Code - Linux Terminal Part 6 - Text Viewers
by
Amr Adel
(en/zhTW)All_Roads_Lead_to_IPC_DannyJiang
by
Danny Jiang
TELECOMMUNICATION FOR SOCIETY to all over
by
madagonikranthikumar
Fluid Mechanics, Heat Transfer, and Mass Transfer_ Chemical Engineering Pract...
by
nikptl09
Top 3 winning teams announcement - TechSprint
by
bajpaitusharoffon678
Basic Thumb rule For switchgear Selection
by
Vimal Kr
ERTMS-conference-WS8_Presentations_v0.pdf
by
Eduardo147194
Electronics Device - EC25C01 - Semiconductor: Types, Conductivity,
by
Mathavan N
Day 01- Basic Knowledge for LPG system design.pdf
by
kmas1612
Chris Elwell Woburn - An Experienced IT Executive
by
Chris Elwell Woburn
Chip Designer's Code - Linux Terminal Part 7.1 - Text Processing
by
Amr Adel
PROPOSED 5 BEDROOM DUPLEX DEVELOPMENT DRAWINGS..pdf
by
jamessylvester167
The Half-Life of Preventive Maintenance: Why PM Compliance Fails & How to Res...
by
MaintWiz Technologies Private Limited
generative ai and prompt Engineering with out put images.pdf
by
info839249
Lecture process synchronization ppt how it
1.
Silberschatz, Galvin and
Gagne ©2013 Operating System Concepts – 9th Edition Chapter 5: Process Synchronization
2.
5.2 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Background Processes can execute concurrently May be interrupted at any time, partially completing execution Concurrent access to shared data may result in data inconsistency Maintaining data consistency requires mechanisms to ensure the orderly execution of cooperating processes Illustration of the problem: Suppose that we wanted to provide a solution to the consumer-producer problem that fills all the buffers. We can do so by having an integer counter that keeps track of the number of full buffers. Initially, counter is set to 0. It is incremented by the producer after it produces a new buffer and is decremented by the consumer after it consumes a buffer.
3.
5.3 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Producer while (true) { /* produce an item in next produced */ while (counter == BUFFER_SIZE) ; /* do nothing */ buffer[in] = next_produced; in = (in + 1) % BUFFER_SIZE; counter++; }
4.
5.4 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Consumer while (true) { while (counter == 0) ; /* do nothing */ next_consumed = buffer[out]; out = (out + 1) % BUFFER_SIZE; counter--; /* consume the item in next consumed */ }
5.
5.5 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Race Condition Race Condition: The situation where several processes access and manipulate shared data concurrently, the final value of the data depends on which process finishes last. counter++ could be implemented as register1 = counter register1 = register1 + 1 counter = register1 counter-- could be implemented as register2 = counter register2 = register2 - 1 counter = register2 Consider this execution interleaving with “count = 5” initially: S0: producer execute register1 = counter {register1 = 5} S1: producer execute register1 = register1 + 1 {register1 = 6} S2: consumer execute register2 = counter {register2 = 5} S3: consumer execute register2 = register2 – 1 {register2 = 4} S4: producer execute counter = register1 {counter = 6 } S5: consumer execute counter = register2 {counter = 4}
6.
5.6 Silberschatz, Galvin
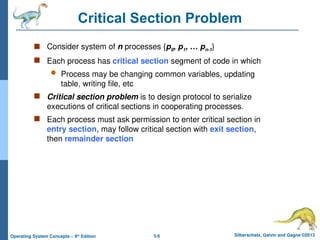
and Gagne ©2013 Operating System Concepts – 9th Edition Critical Section Problem Consider system of n processes {p0, p1, … pn-1} Each process has critical section segment of code in which Process may be changing common variables, updating table, writing file, etc Critical section problem is to design protocol to serialize executions of critical sections in cooperating processes. Each process must ask permission to enter critical section in entry section, may follow critical section with exit section, then remainder section
7.
5.7 Silberschatz, Galvin
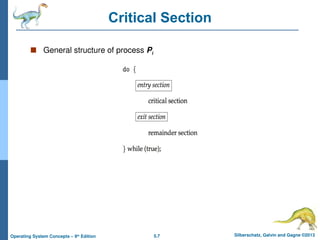
and Gagne ©2013 Operating System Concepts – 9th Edition Critical Section General structure of process Pi
8.
5.8 Silberschatz, Galvin
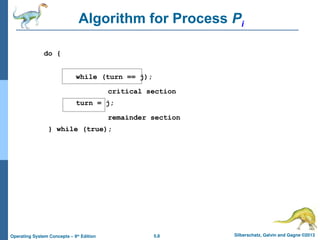
and Gagne ©2013 Operating System Concepts – 9th Edition Algorithm for Process Pi do { while (turn == j); critical section turn = j; remainder section } while (true);
9.
5.9 Silberschatz, Galvin
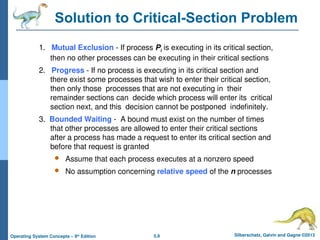
and Gagne ©2013 Operating System Concepts – 9th Edition Solution to Critical-Section Problem 1. Mutual Exclusion - If process Pi is executing in its critical section, then no other processes can be executing in their critical sections 2. Progress - If no process is executing in its critical section and there exist some processes that wish to enter their critical section, then only those processes that are not executing in their remainder sections can decide which process will enter its critical section next, and this decision cannot be postponed indefinitely. 3. Bounded Waiting - A bound must exist on the number of times that other processes are allowed to enter their critical sections after a process has made a request to enter its critical section and before that request is granted Assume that each process executes at a nonzero speed No assumption concerning relative speed of the n processes
10.
5.10 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Peterson’s Solution Good algorithmic description of solving the problem Two process solution Assume that the load and store machine-language instructions are atomic; that is, cannot be interrupted The two processes share two variables: int turn; Boolean flag[2] The variable turn indicates whose turn it is to enter the critical section The flag array is used to indicate if a process is ready to enter the critical section. flag[i] = true implies that process Pi is ready!
11.
5.11 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Algorithm for Process Pi do { flag[i] = true; turn = j; while (flag[j] && turn = = j); critical section flag[i] = false; remainder section } while (true);
12.
5.12 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Peterson’s Solution (Cont.) Provable that the three CS requirement are met: 1. Mutual exclusion is preserved Pi enters CS only if: either flag[j] = false or turn = i 2. Progress requirement is satisfied 3. Bounded-waiting requirement is met
13.
5.13 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Synchronization Hardware Many systems provide hardware support for implementing the critical section code. All solutions below based on idea of locking Protecting critical regions via locks Uniprocessors – could disable interrupts Currently running code would execute without preemption Generally too inefficient on multiprocessor systems Operating systems using this not broadly scalable Modern machines provide special atomic hardware instructions Atomic = non-interruptible Either test memory word and set value Or swap contents of two memory words
14.
5.14 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Semaphore Synchronization tool that provides more sophisticated ways (than Mutex locks) for process to synchronize their activities. Semaphore S – integer variable Can only be accessed via two indivisible (atomic) operations wait() and signal() Originally called P() and V() Definition of the wait() operation wait(S) { while (S <= 0) ; // busy wait S--; } Definition of the signal() operation signal(S) { S++; }
15.
5.15 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Semaphore Usage Counting semaphore – integer value can range over an unrestricted domain Binary semaphore – integer value can range only between 0 and 1 Same as a mutex lock Can solve various synchronization problems Consider P1 and P2 that require S1 to happen before S2 Create a semaphore “synch” initialized to 0 P1: S1; signal(synch); P2: wait(synch); S2; Can implement a counting semaphore S as a binary semaphore
16.
5.16 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Semaphore Implementation Must guarantee that no two processes can execute the wait() and signal() on the same semaphore at the same time Thus, the implementation becomes the critical section problem where the wait and signal code are placed in the critical section Could now have busy waiting in critical section implementation But implementation code is short Little busy waiting if critical section rarely occupied Note that applications may spend lots of time in critical sections and therefore this is not a good solution
17.
5.17 Silberschatz, Galvin
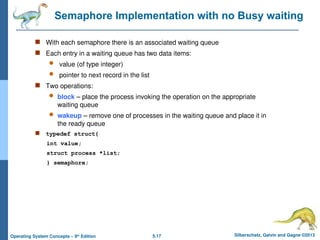
and Gagne ©2013 Operating System Concepts – 9th Edition Semaphore Implementation with no Busy waiting With each semaphore there is an associated waiting queue Each entry in a waiting queue has two data items: value (of type integer) pointer to next record in the list Two operations: block – place the process invoking the operation on the appropriate waiting queue wakeup – remove one of processes in the waiting queue and place it in the ready queue typedef struct{ int value; struct process *list; } semaphore;
18.
5.18 Silberschatz, Galvin
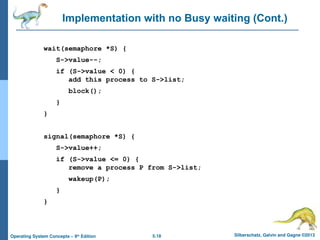
and Gagne ©2013 Operating System Concepts – 9th Edition Implementation with no Busy waiting (Cont.) wait(semaphore *S) { S->value--; if (S->value < 0) { add this process to S->list; block(); } } signal(semaphore *S) { S->value++; if (S->value <= 0) { remove a process P from S->list; wakeup(P); } }
19.
5.19 Silberschatz, Galvin
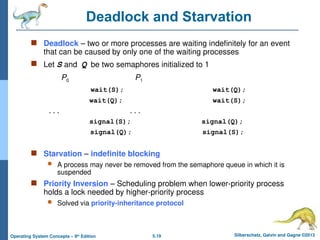
and Gagne ©2013 Operating System Concepts – 9th Edition Deadlock and Starvation Deadlock – two or more processes are waiting indefinitely for an event that can be caused by only one of the waiting processes Let S and Q be two semaphores initialized to 1 P0 P1 wait(S); wait(Q); wait(Q); wait(S); ... ... signal(S); signal(Q); signal(Q); signal(S); Starvation – indefinite blocking A process may never be removed from the semaphore queue in which it is suspended Priority Inversion – Scheduling problem when lower-priority process holds a lock needed by higher-priority process Solved via priority-inheritance protocol
20.
5.20 Silberschatz, Galvin
and Gagne ©2013 Operating System Concepts – 9th Edition Classical Problems of Synchronization Classical problems used to test newly-proposed synchronization schemes Bounded-Buffer Problem Readers and Writers Problem Dining-Philosophers Problem
Download
![5.3 Silberschatz, Galvin and Gagne ©2013
Operating System Concepts – 9th
Edition
Producer
while (true) {
/* produce an item in next produced */
while (counter == BUFFER_SIZE) ;
/* do nothing */
buffer[in] = next_produced;
in = (in + 1) % BUFFER_SIZE;
counter++;
}](https://image.slidesharecdn.com/lec13-15-251217140410-c31f2ee2/85/Lecture-process-synchronization-ppt-how-it-3-320.jpg)
![5.4 Silberschatz, Galvin and Gagne ©2013
Operating System Concepts – 9th
Edition
Consumer
while (true) {
while (counter == 0)
; /* do nothing */
next_consumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
counter--;
/* consume the item in next consumed */
}](https://image.slidesharecdn.com/lec13-15-251217140410-c31f2ee2/85/Lecture-process-synchronization-ppt-how-it-4-320.jpg)
![5.10 Silberschatz, Galvin and Gagne ©2013
Operating System Concepts – 9th
Edition
Peterson’s Solution
Good algorithmic description of solving the problem
Two process solution
Assume that the load and store machine-language
instructions are atomic; that is, cannot be interrupted
The two processes share two variables:
int turn;
Boolean flag[2]
The variable turn indicates whose turn it is to enter the critical
section
The flag array is used to indicate if a process is ready to enter
the critical section. flag[i] = true implies that process Pi is
ready!](https://image.slidesharecdn.com/lec13-15-251217140410-c31f2ee2/85/Lecture-process-synchronization-ppt-how-it-10-320.jpg)
![5.11 Silberschatz, Galvin and Gagne ©2013
Operating System Concepts – 9th
Edition
Algorithm for Process Pi
do {
flag[i] = true;
turn = j;
while (flag[j] && turn = = j);
critical section
flag[i] = false;
remainder section
} while (true);](https://image.slidesharecdn.com/lec13-15-251217140410-c31f2ee2/85/Lecture-process-synchronization-ppt-how-it-11-320.jpg)
![5.12 Silberschatz, Galvin and Gagne ©2013
Operating System Concepts – 9th
Edition
Peterson’s Solution (Cont.)
Provable that the three CS requirement are met:
1. Mutual exclusion is preserved
Pi enters CS only if:
either flag[j] = false or turn = i
2. Progress requirement is satisfied
3. Bounded-waiting requirement is met](https://image.slidesharecdn.com/lec13-15-251217140410-c31f2ee2/85/Lecture-process-synchronization-ppt-how-it-12-320.jpg)






![ch5 [Autosaved].ppt](https://cdn.slidesharecdn.com/ss_thumbnails/ch5autosaved-230604145932-d82b045b-thumbnail.jpg?width=640&height=640&fit=bounds)