More Related Content

PPTX

PDF
【CVPR 2020 メタサーベイ】Vision Applications and Systems 
PDF

PPTX

PPTX
ITを使った今時の聖地巡礼ユーザー分析 in 沼津 
PPTX

PPTX

PPTX
Featured

PDF
Everything You Need To Know About ChatGPT 
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process 
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing 
PDF
ChatGPT and the Future of Work - Clark Boyd 
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis... 
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf 
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights 
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR... 
PDF
2024 State of Marketing Report – by Hubspot 
PPTX
How to Prepare For a Successful Job Search for 2024 
PDF

PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024 
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent 
PDF
Product Design Trends in 2024 | Teenage Engineerings 
PDF
Content Methodology: A Best Practices Report (Webinar) 
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024 
PDF
Getting into the tech field. what next 
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health 
PDF
5 Public speaking tips from TED - Visualized summary 
PDF
How to have difficult conversations Kincetを用いた鍬動作の初心者と熟練者の比較分析手法の試作
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
- 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
考察
認識した鍬動作について
- 鍬を手と誤認識する問題は腕の長さで補正することで改善でき
る可能性がある
-基本周波数・Wiiリモコンからの加速度をもとに分割の精度を改
善できる可能性がある
- 本稿で認識し分割した動作以外にも鍬動作は存在する
農作業基本オントロジー[朱 16]が参考になる可能性がある
データの蓄積について
- 十分な人数の熟練者の動作を蓄積し,これを名人のデータとし
て分析に使う
- 実際の畑で計測を行うので障害物を考慮する必要がある
朱 他: データ連携のためのオントロジーを用いた農業分野の用語標準化. JSAI2016, 2D5-4, 2016.
- 32.
Editor's Notes
- #3 2016年秋に設立された人工知能学会の市民共創知研究会がある
市民があつまって大学などと一緒に研究をすることを市民共創プロジェクトと呼んでいる
その一つとして農業を科学するというコンセプトのもとに立ち上がった市民共創プロジェクトである「スーパーアグリ構想」がある
発案者である大森は農家民宿を訪れる都心からの学生は鍬や身体の使い方がわからないことが多いと指摘している
そこで本研究では身体の使い方や農作業を指導するために,「名人の技を科学する」というアプローチから
鍬の名人と初心者のデータを蓄積,比較するために鍬動作を分析した.
- #5 発案者である共著者の大森は農家体験にくる学生や家庭菜園の初心者は鍬や身体の使い方がわからないことが多いと指摘している
そこで本研究では身体の使い方や農作業を指導するために,「名人の技を科学する」というアプローチから
鍬の名人と初心者のデータを認識・蓄積,比較するために鍬動作を分析した.
- #6 比較
- #7 比較(開発中)
アドバイス生成(未実装)
- #35 デバイスコネクトWebAPIを使ってHTTP GET リクエストで加速度を取得していた
それではリアルタイムでデータがとれなかった
WebSocketを用いると改善できる
Web経由で計測しているので
加速度の取得には時差があり,精度も良くないので使うためには改善が必要






![鍬動作の比較
熟練者と初心者の鍬動作を比較するためには
データ同士の比較をしやすくする必要がある
参考文献[白鳥 05]をもとに
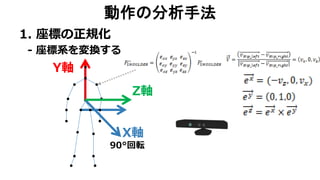
1. 空間的にそろえる
→対象が常に横を向くように座標を正規化
2. 時間的にそろえる
→取得した座標から得た速さの時系列データを
動作プリミティブに分割
白鳥貴亮 他: モーションキャプチャと音楽情報を用いた舞踊動作解析手法, 電子情報通信学会論文誌 D, 2005.](https://image.slidesharecdn.com/ichinoseisai2017-170716064032/85/Kincet-7-320.jpg)



![動作の分析手法
2. 動作プリミティブの抽出
動作プリミティブとは
「人間の動きを短い単位時間に分けたときの動作要素とする」[佐藤 07]
本研究では鍬の動作として2パターンを想定
(1)「振り上げ」「振り下ろし」「引き」
振り上げた時に静止する場合
(2)「引き」「空中動作」
空中で静止せず動作が連続する場合
佐藤知正 他: 日常生活支援のための机上作業のモデル化およびその認識と支援軌道の生成, 日本ロボット学会誌, 2007.](https://image.slidesharecdn.com/ichinoseisai2017-170716064032/85/Kincet-12-320.jpg)

















![考察
認識した鍬動作について
- 鍬を手と誤認識する問題は腕の長さで補正することで改善でき
る可能性がある
- 基本周波数・Wiiリモコンからの加速度をもとに分割の精度を改
善できる可能性がある
- 本稿で認識し分割した動作以外にも鍬動作は存在する
農作業基本オントロジー[朱 16]が参考になる可能性がある
データの蓄積について
- 十分な人数の熟練者の動作を蓄積し,これを名人のデータとし
て分析に使う
- 実際の畑で計測を行うので障害物を考慮する必要がある
朱 他: データ連携のためのオントロジーを用いた農業分野の用語標準化. JSAI2016, 2D5-4, 2016.](https://image.slidesharecdn.com/ichinoseisai2017-170716064032/85/Kincet-31-320.jpg)
