
Recommended
More Related Content
Viewers also liked
Viewers also liked (20)
Similar to IP_poster_presentation
Similar to IP_poster_presentation (20)
IP_poster_presentation
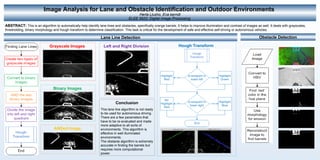
- 1. Image Analysis for Lane and Obstacle Identification and Outdoor Environments Herta Llusho, Eva berndt ELEE 5920: Digital Image Processing Obstacle Detection This lane line algorithm is not ready to be used for autonomous driving. There are a few parameters that have to be re-evaluated and made more adaptive to all sorts of environments. This algorithm is effective in well illuminated environments. The obstacle algorithm is extremely accurate in finding the barrels but requires more computational power. Lane Line Detection ABSTRACT: This is an algorithm to automatically help identify lane lines and obstacles, specifically orange barrels. It helps to improve illumination and contrast of images as well. It deals with grayscales, thresholding, binary morphology and hough transform to determine classification. This task is critical for the development of safe and effective self-driving or autonomous vehicles. Grayscale Images Binary Images ANDed Image Left and Right Division Hough Transform Conclusion