This document discusses intelligence and knowledge in artificial intelligence. It covers several topics:
1) Recognizing intelligence, including the Turing Test which proposes that a machine can be considered intelligent if a human interrogator cannot distinguish it from a human via text-based communication.
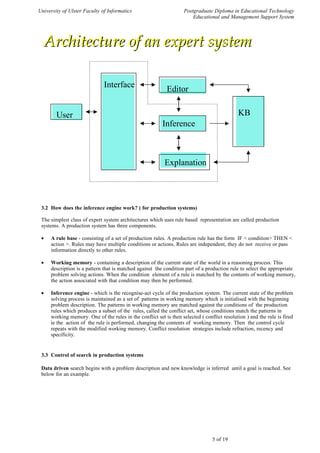
2) Machine learning and knowledge-based systems, which represent knowledge through structures like semantic networks, frames and scripts.
3) The knowledge engineering process, including knowledge acquisition techniques like interviewing and protocol analysis to extract expert knowledge and build expert systems.
4) RoboCup, an AI challenge involving robotic soccer that poses research problems in multi-agent systems and simulation.