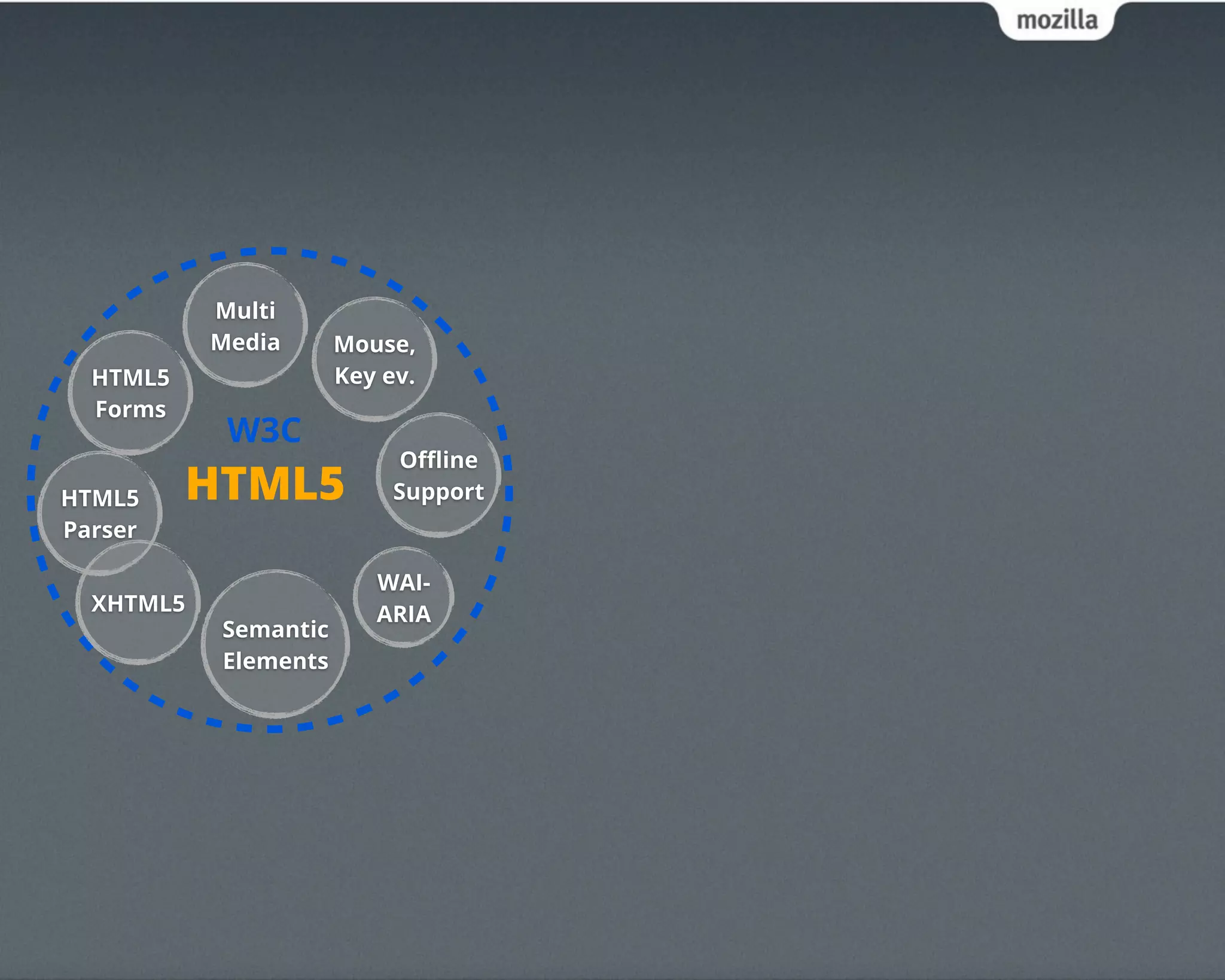
Multi
Media Mouse,
HTML5 Key ev.
Forms
W3C
Offline
HTML5 HTML5 Support
Parser
WAI-
XHTML5 ARIA
Semantic
Elements
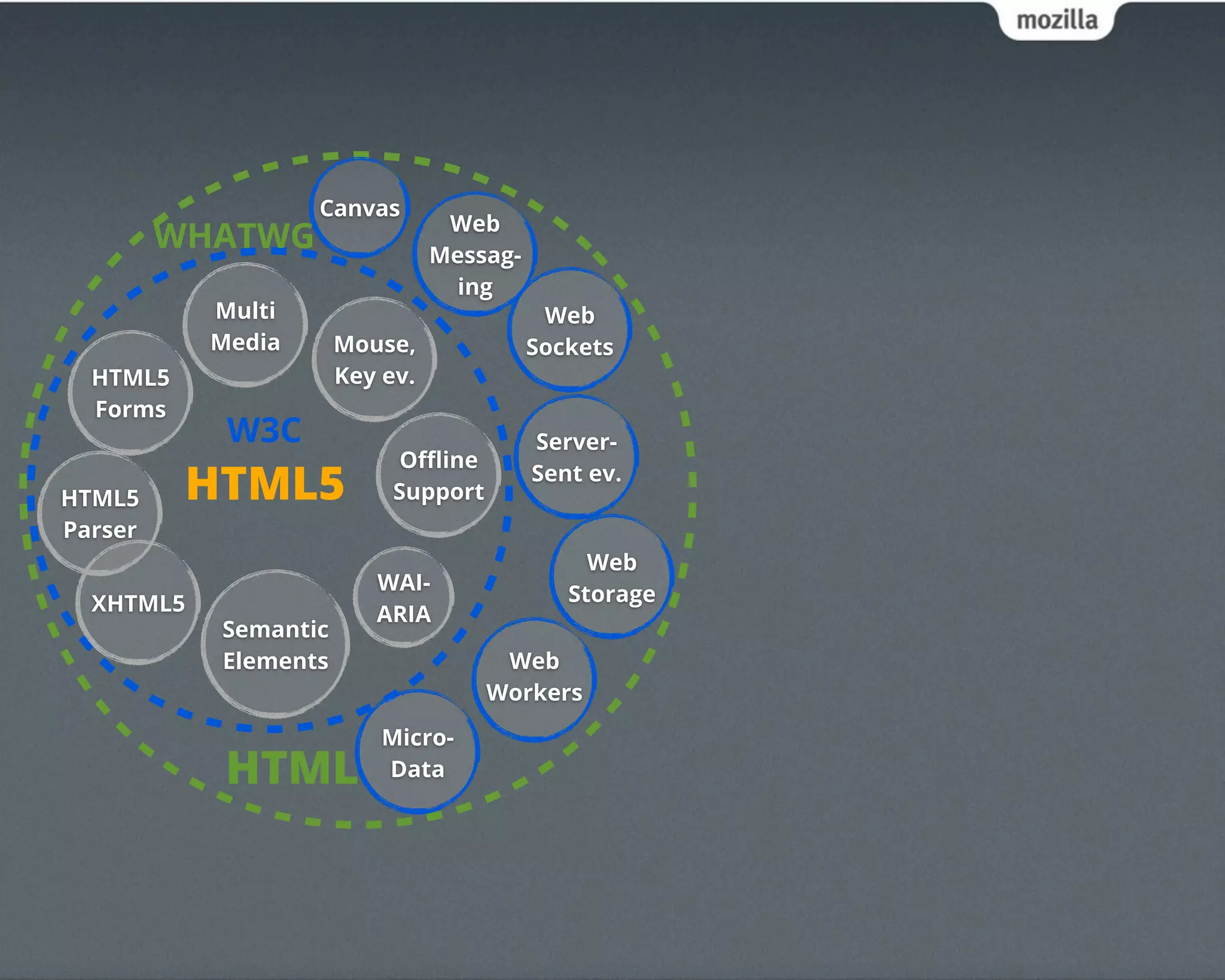
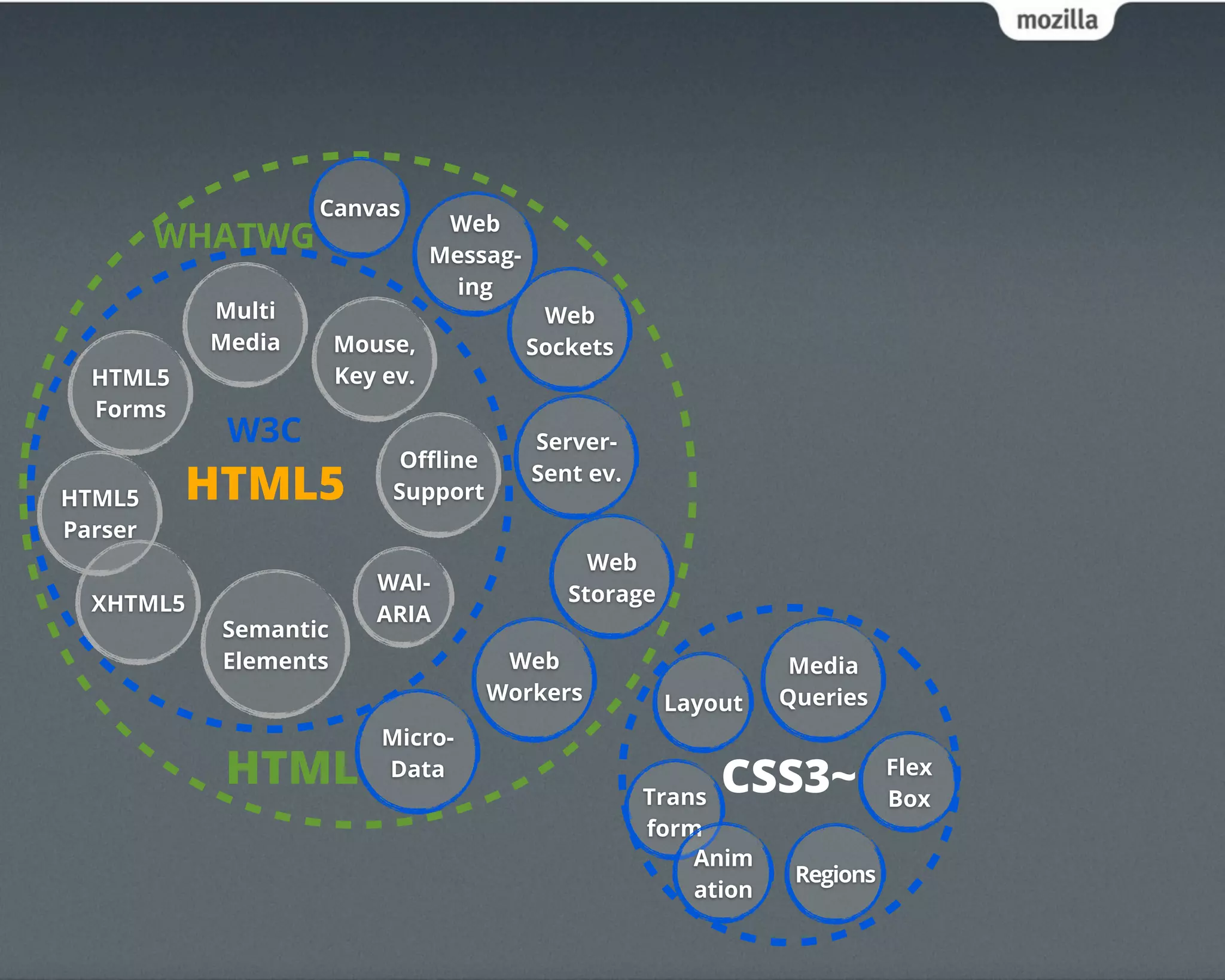
13.
Canvas
Web
WHATWG Messag-
ing
Multi Web
Media Mouse, Sockets
HTML5 Key ev.
Forms
W3C Server-
Offline
HTML5 HTML5 Support
Sent ev.
Parser
Web
WAI-
XHTML5 Storage
ARIA
Semantic
Elements Web
Workers
Micro-
HTML Data
14.
Canvas
Web
WHATWG Messag-
ing
Multi Web
Media Mouse, Sockets
HTML5 Key ev.
Forms
W3C Server-
Offline
HTML5 HTML5 Support
Sent ev.
Parser
Web
WAI-
XHTML5 Storage
ARIA
Semantic
Elements Web Media
Workers Layout Queries
Micro-
HTML Data
Trans
CSS3~ Flex
Box
form
Anim
Regions
ation
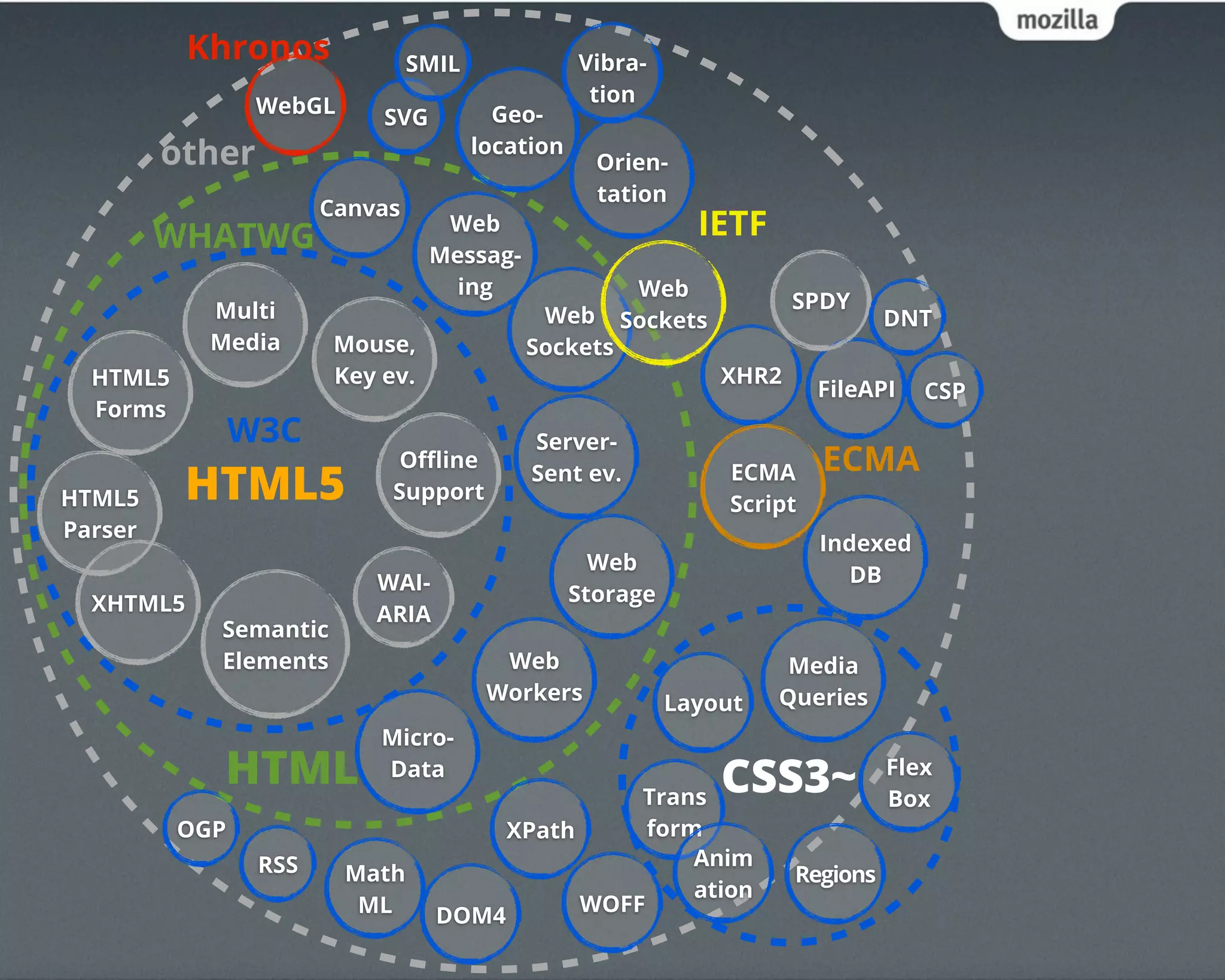
15.
Khronos SMIL Vibra-
tion
WebGL Geo-
SVG
other location
Orien-
tation
Canvas
WHATWG Web IETF
Messag-
ing Web
Multi SPDY
Web Sockets DNT
Media Mouse, Sockets
HTML5 Key ev. XHR2
FileAPI CSP
Forms
W3C Server-
Offline ECMA
HTML5 HTML5 Support
Sent ev. ECMA
Script
Parser
Indexed
Web
WAI- DB
XHTML5 Storage
ARIA
Semantic
Elements Web Media
Workers Layout Queries
Micro-
HTML Data
Trans
CSS3~ Flex
Box
OGP XPath form
RSS Anim
Math Regions
ation
ML WOFF
DOM4
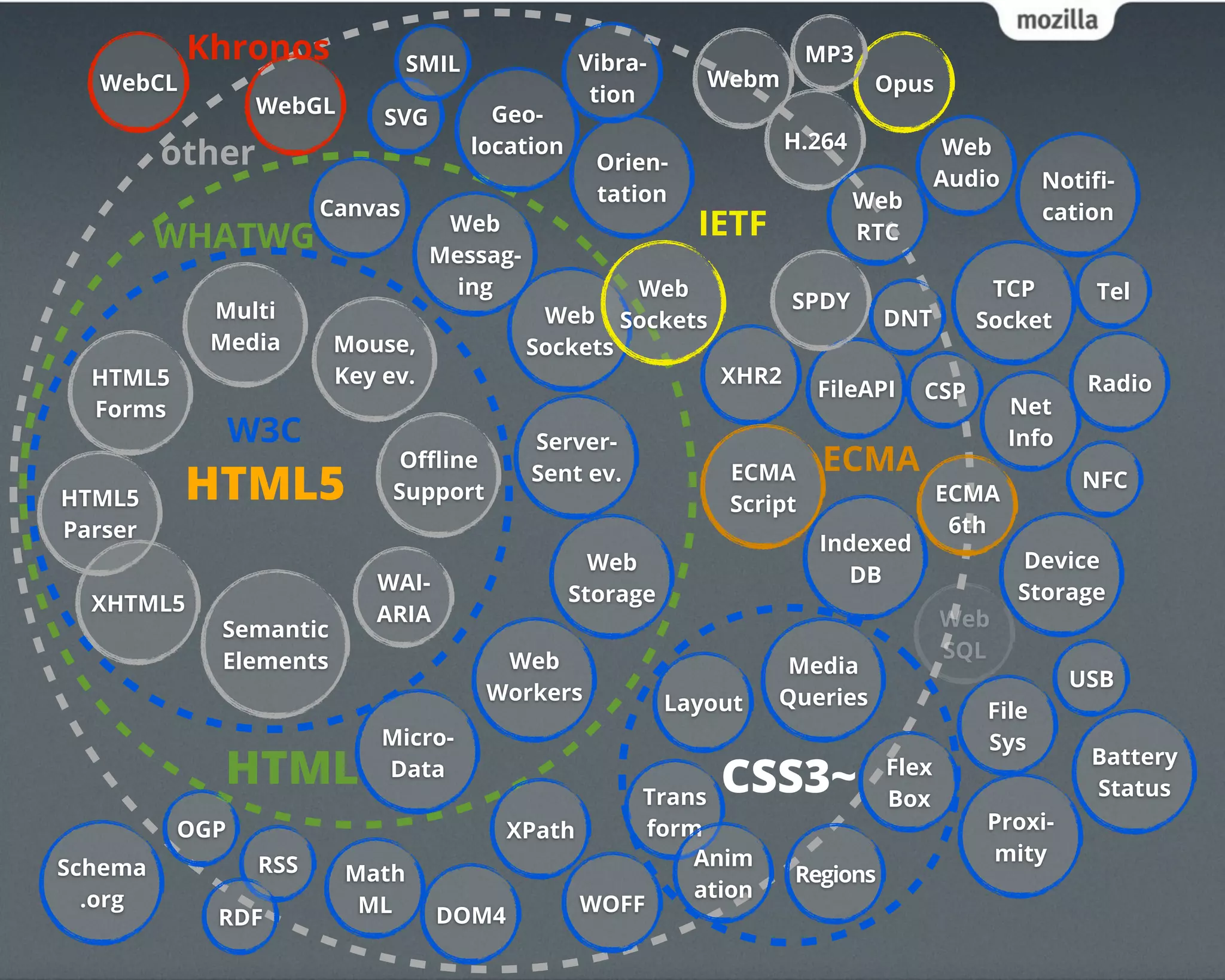
16.
Khronos SMIL Vibra- MP3
WebCL Webm Opus
tion
WebGL Geo-
SVG
H.264
other location
Orien-
Web
Audio Notifi-
tation Web
Canvas cation
WHATWG Web IETF RTC
Messag-
ing Web TCP Tel
Multi SPDY
Web Sockets DNT Socket
Media Mouse, Sockets
HTML5 Key ev. XHR2 Radio
FileAPI CSP
Forms Net
W3C Server- Info
Offline ECMA
HTML5 HTML5 Support
Sent ev. ECMA
Script ECMA
NFC
Parser 6th
Indexed
Web Device
WAI- DB
Storage Storage
XHTML5 ARIA
Semantic Web
Elements Web SQL
Media
USB
Workers Layout Queries
File
Micro- Sys
HTML Data
Trans
CSS3~ Flex Battery
Status
Box
OGP XPath form Proxi-
Anim mity
Schema RSS Math Regions
.org ation
ML WOFF
RDF DOM4
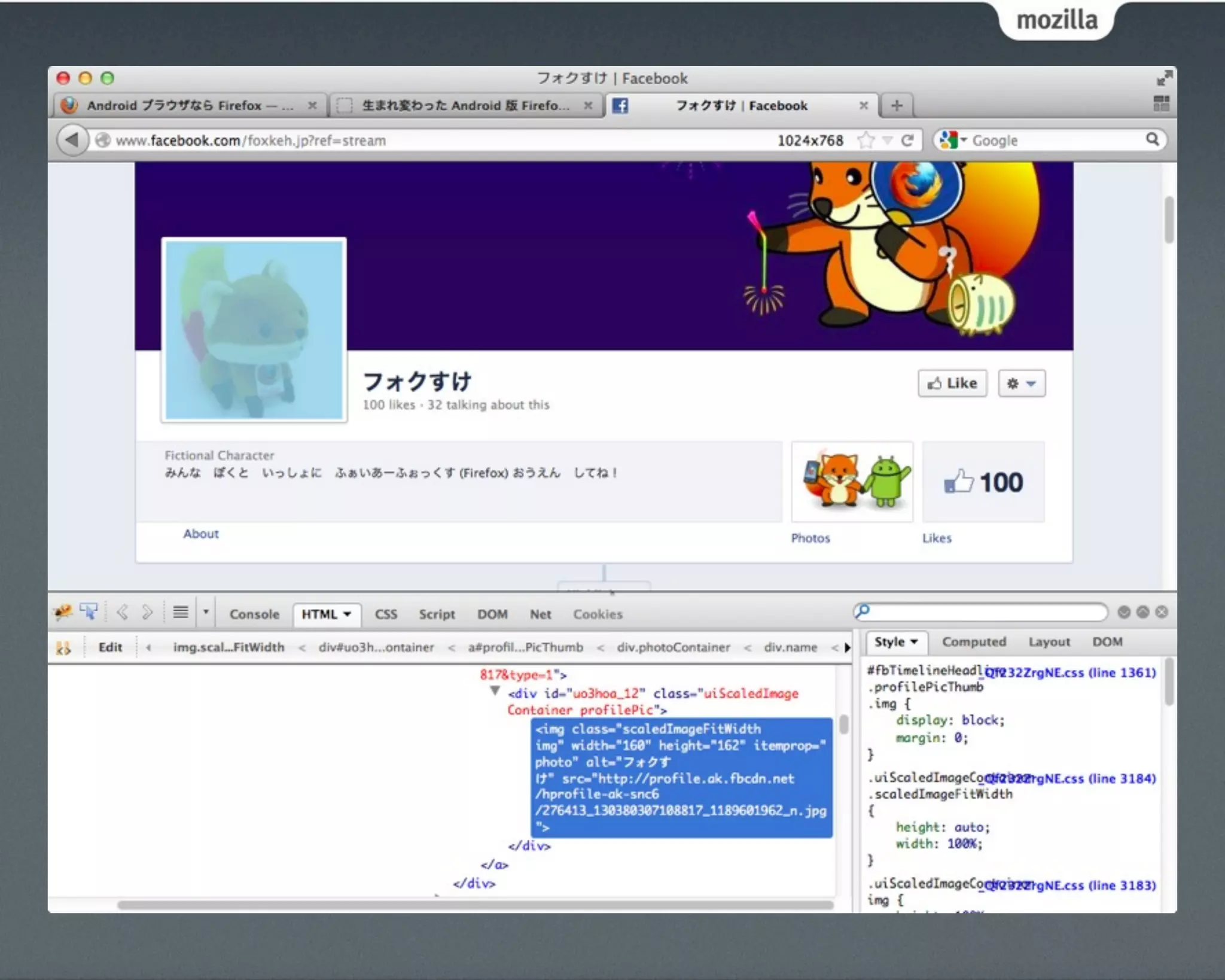
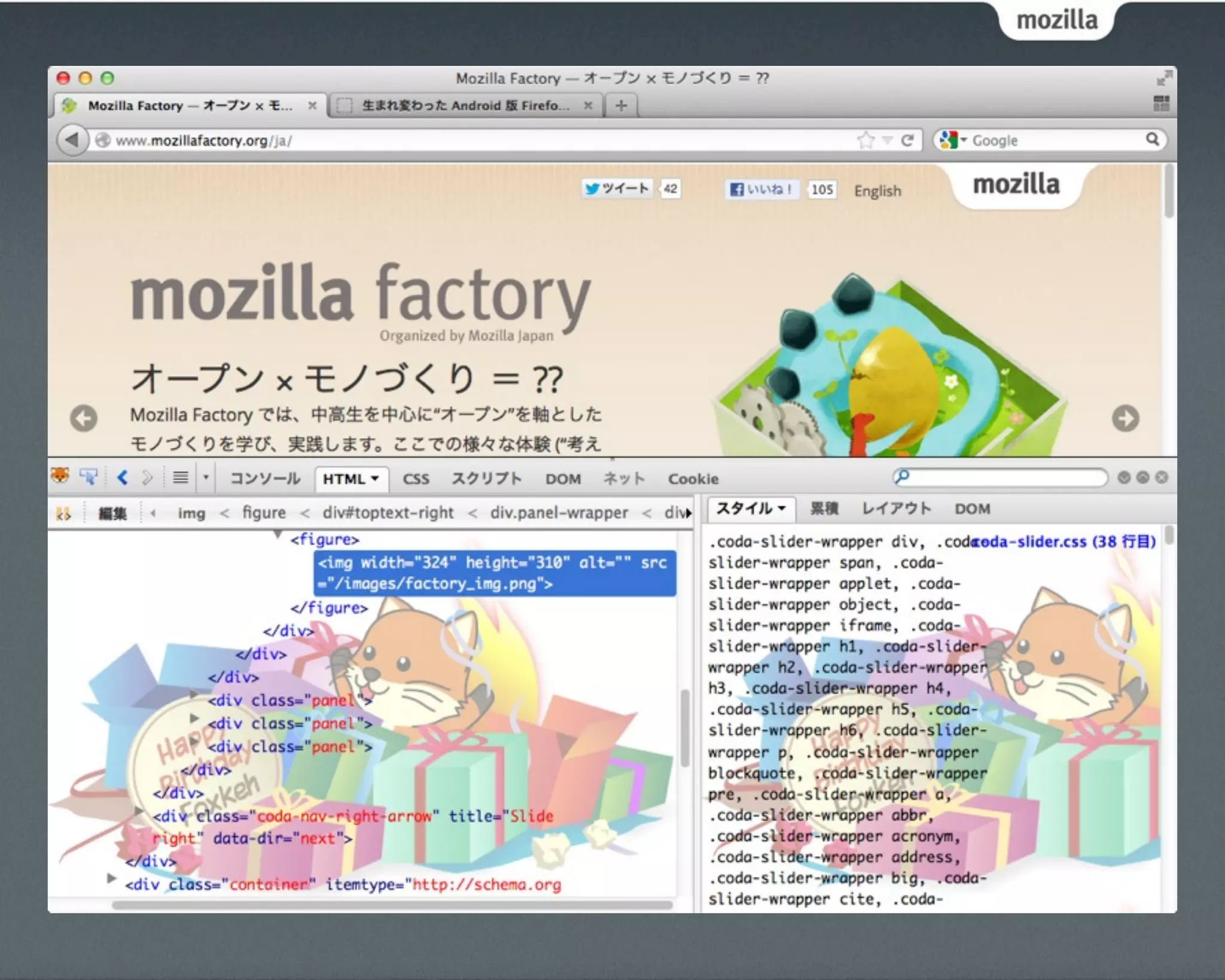
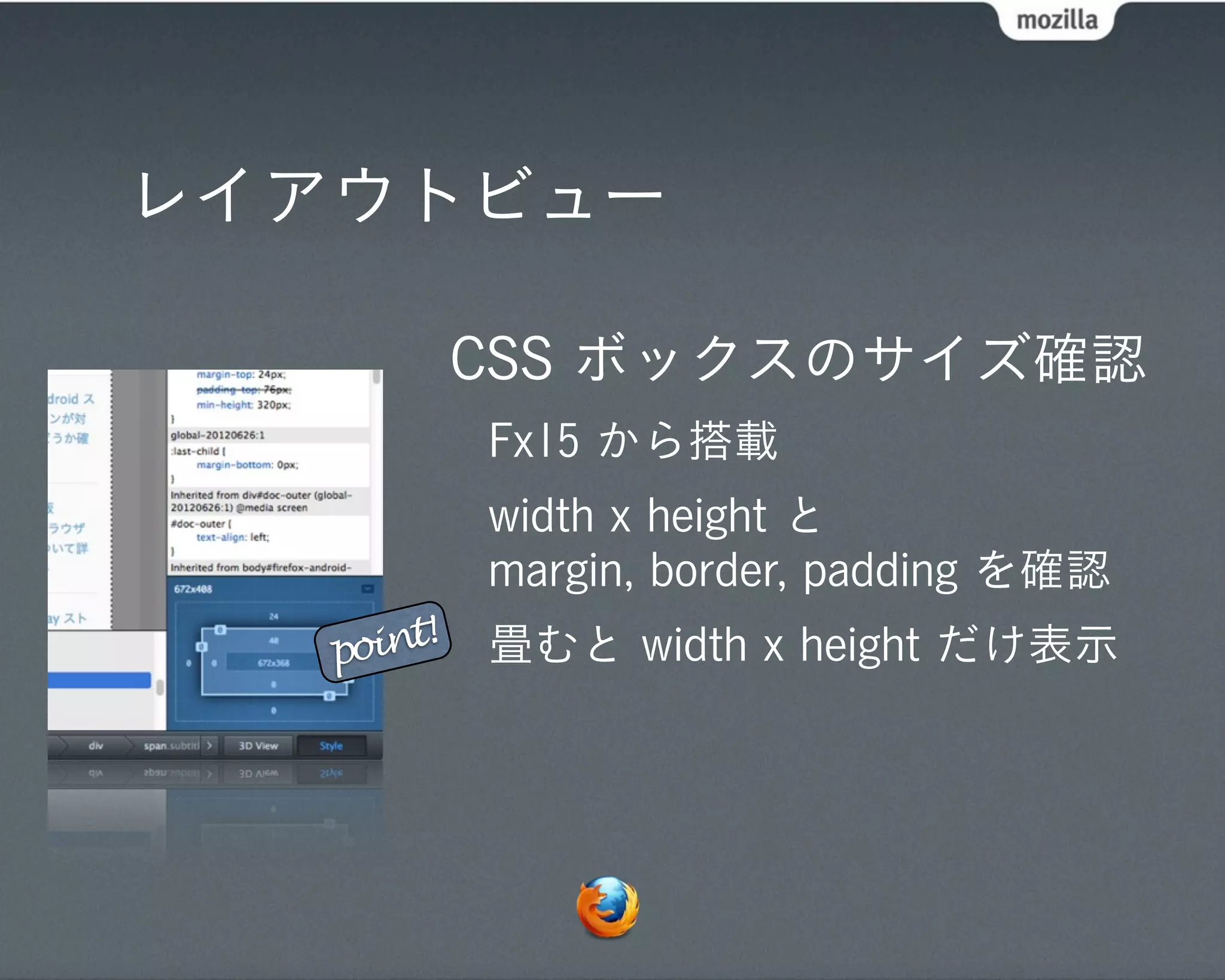
レイアウトビュー
CSS ボックスのサイズ確認
Fx15 から搭載
width x height と
margin, border, padding を確認
point! 畳むと width x height だけ表示
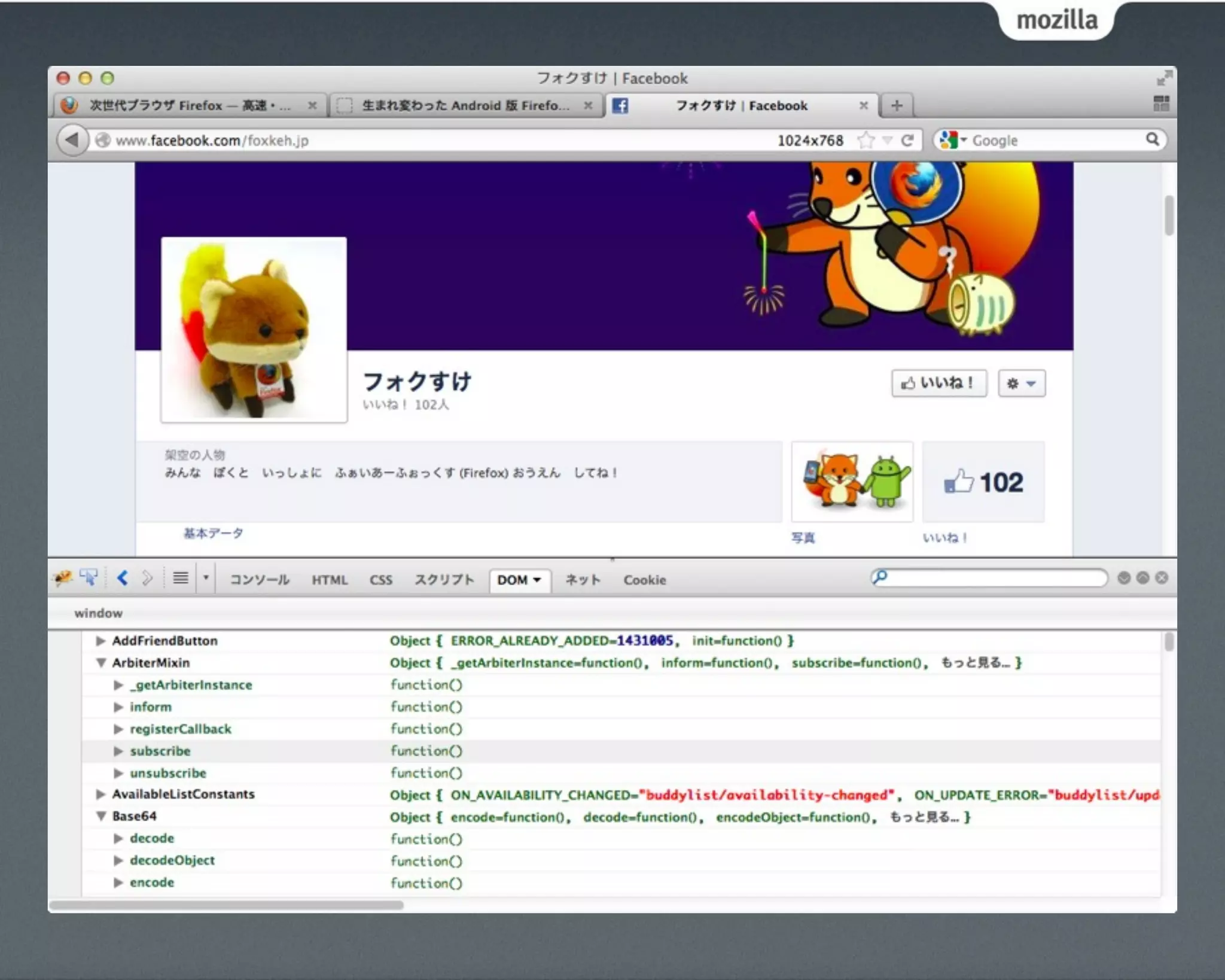
36.
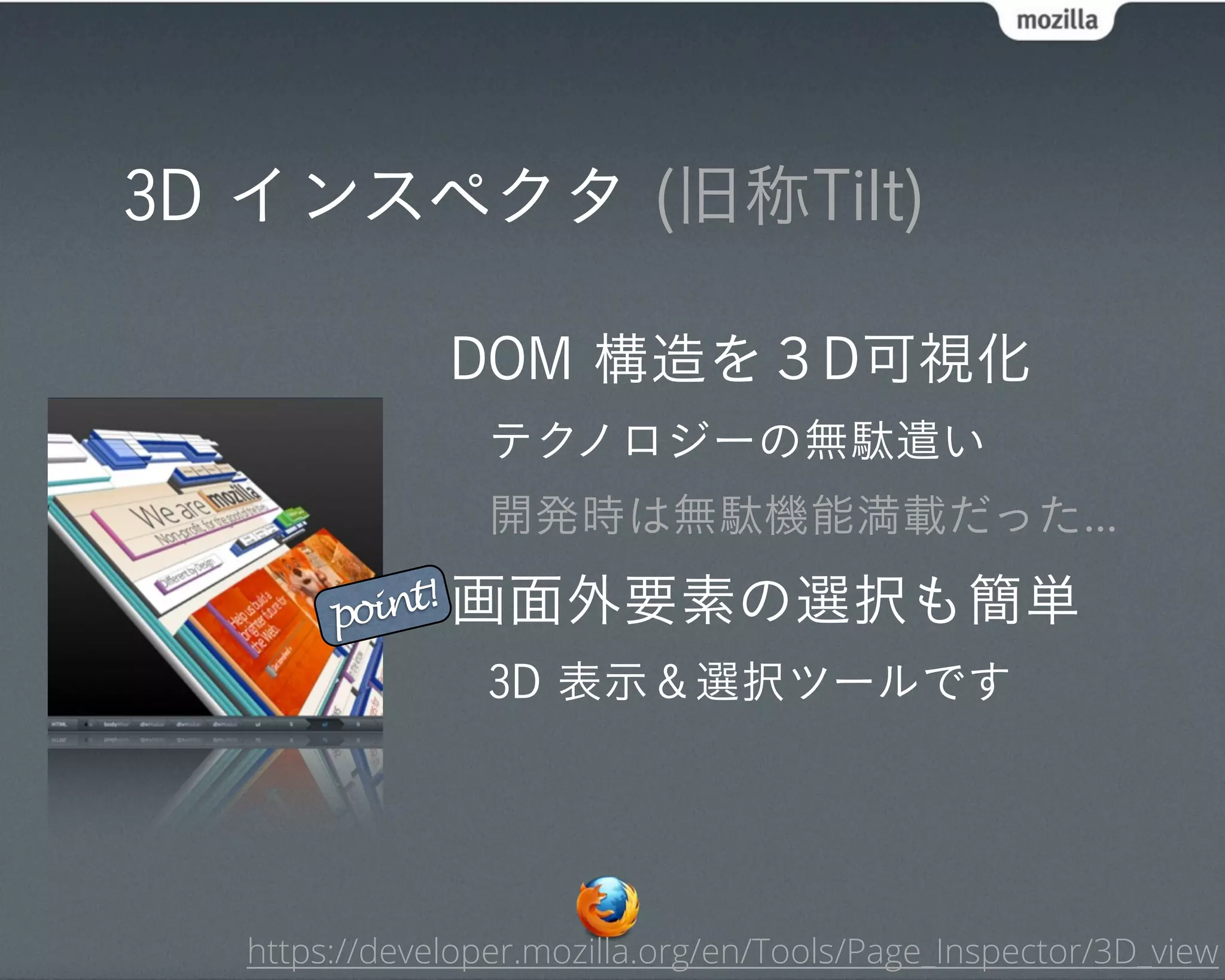
3D インスペクタ (旧称Tilt)
DOM 構造を3D可視化
テクノロジーの無駄遣い
開発時は無駄機能満載だった...
point! 画面外要素の選択も簡単
3D 表示&選択ツールです
https://developer.mozilla.org/en/Tools/Page_Inspector/3D_view







![隠し設定
プリセット画面サイズを
about:config で変更可能
devtools.responsiveUI.presets =
[{"width": 320, "height": 480},
{"width": 360, "height": 640},
{"width": 480, "height": 800}]
など JSON 文字列で指定
再起動後に反映されます](https://image.slidesharecdn.com/firefoxfirebug-reduced-120904180049-phpapp02/75/Firefox-and-Firebug-with-Foxkeh-43-2048.jpg)
![ショートカットキー
機能 キー 機能 キー
すべて選択 Ctrl-A 取り消し Ctrl-Z
コピー Ctrl-C インデント Tab
検索 Ctrl-F 逆インデント Shift-Tab
Alt-↑ @win
次を検索 Ctrl-G 行を上に移動 Ctrl-Option-↑ @mac
Ctrl-L Alt-↓ @win
指定行に移動 行を下に移動 Ctrl-Option-↓ @mac
やり直し Ctrl-Shift-Z コメントオンオフ Ctrl-/ @Fx14
貼り付け Ctrl-V 開き括弧に移動 Ctrl-[ @Fx14
切り取り Ctrl-X 閉じ括弧に移動 Ctrl-] @Fx14
https://developer.mozilla.org/en/Tools/Using_the_Source_Editor](https://image.slidesharecdn.com/firefoxfirebug-reduced-120904180049-phpapp02/75/Firefox-and-Firebug-with-Foxkeh-56-2048.jpg)