Basic Terminologies
Data: Rawfacts and figures without context.
Information: Processed data that is meaningful.
Data Structure: A way of organizing and storing data so it can be accessed and
modified efficiently.
Abstract Data Type (ADT): A model for data structures that defines the data and the
operations without specifying implementation.
Node: A basic unit of data structure (e.g., in linked lists, trees).
Pointer/Reference: A variable that stores the memory address of another variable.
4.
Linear Data Structures
A linear data structure is a type of data
structure where elements are arranged in a
sequential order, one after the other.
Each element is connected to its previous and
next element, forming a linear sequence.
Examples:
Array
Linked List
Stack
Queue
5.
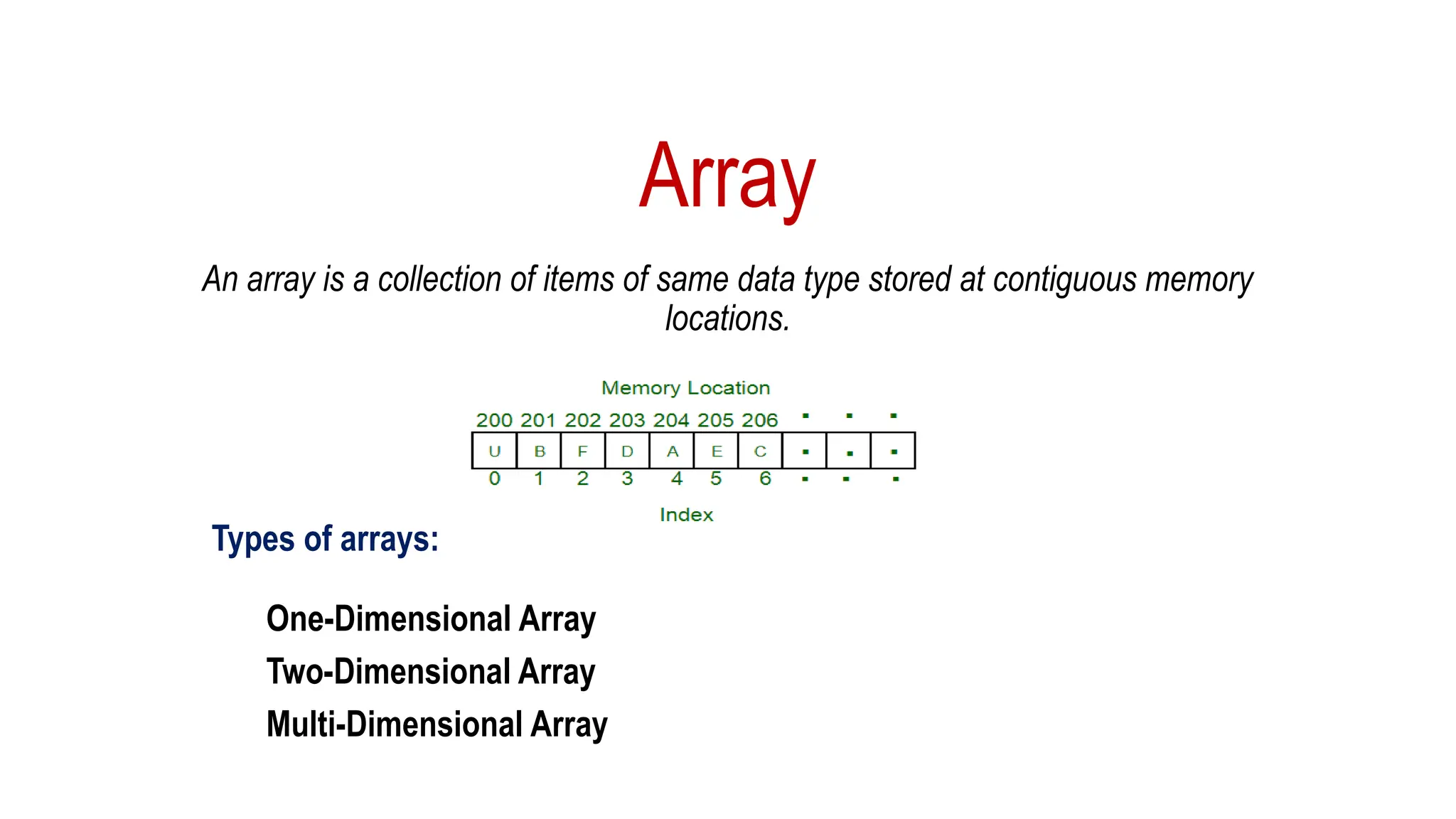
Array
An array isa collection of items of same data type stored at contiguous memory
locations.
Types of arrays:
One-Dimensional Array
Two-Dimensional Array
Multi-Dimensional Array
6.
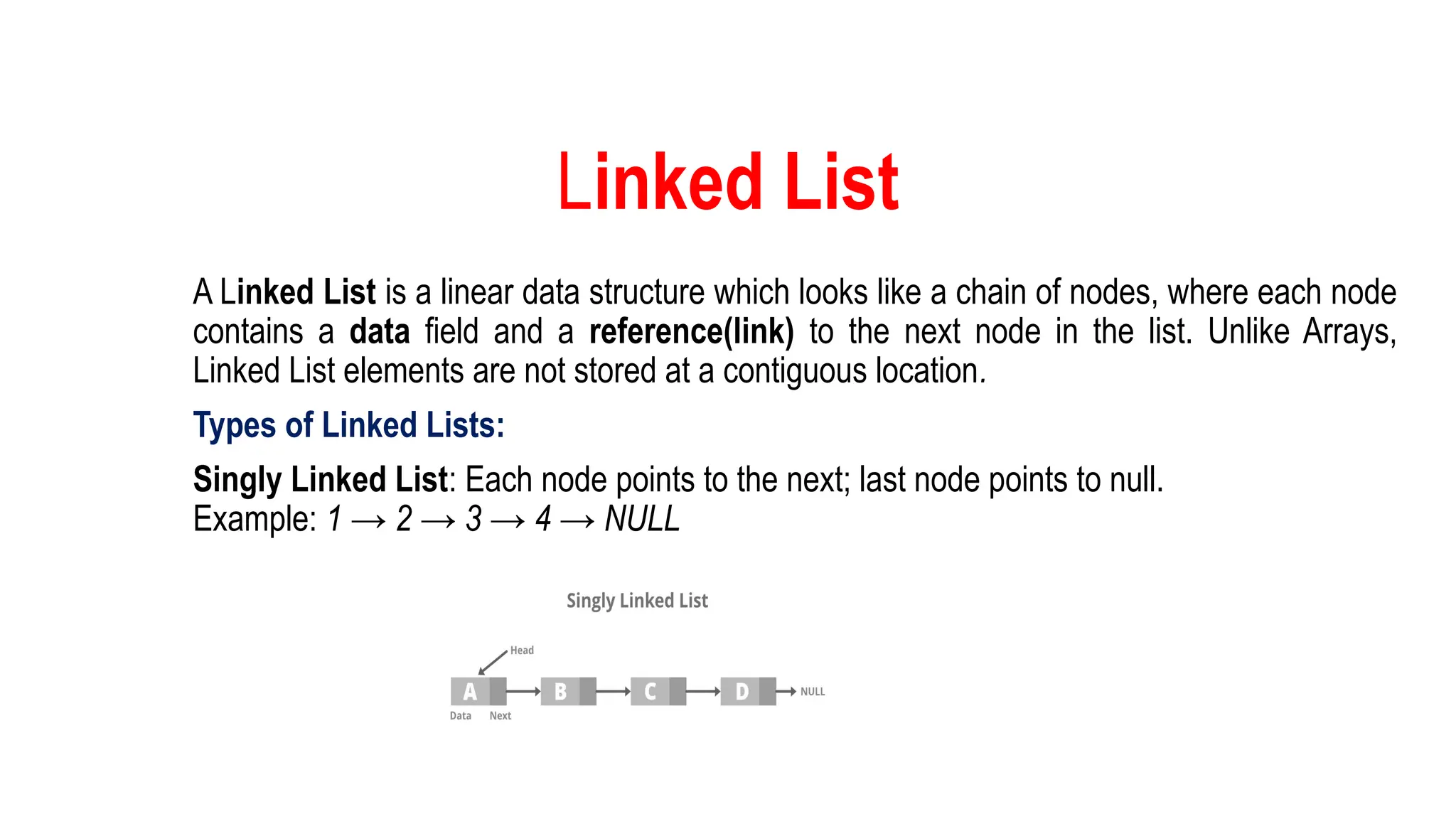
Linked List
A LinkedList is a linear data structure which looks like a chain of nodes, where each node
contains a data field and a reference(link) to the next node in the list. Unlike Arrays,
Linked List elements are not stored at a contiguous location.
Types of Linked Lists:
Singly Linked List: Each node points to the next; last node points to null.
Example: 1 → 2 → 3 → 4 → NULL
7.
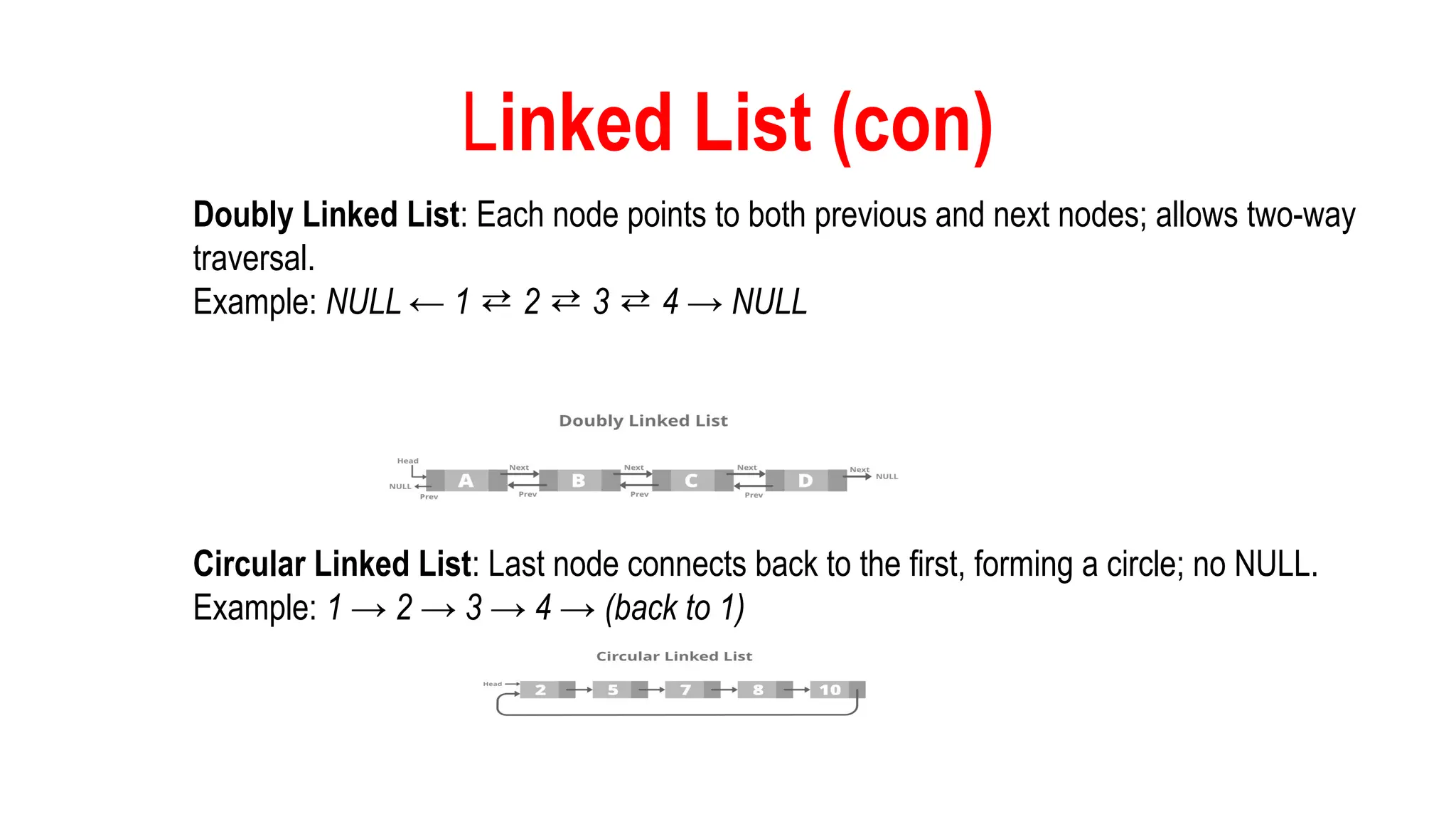
Linked List (con)
DoublyLinked List: Each node points to both previous and next nodes; allows two-way
traversal.
Example: NULL ← 1 2 3 4 → NULL
⇄ ⇄ ⇄
Circular Linked List: Last node connects back to the first, forming a circle; no NULL.
Example: 1 → 2 → 3 → 4 → (back to 1)
8.
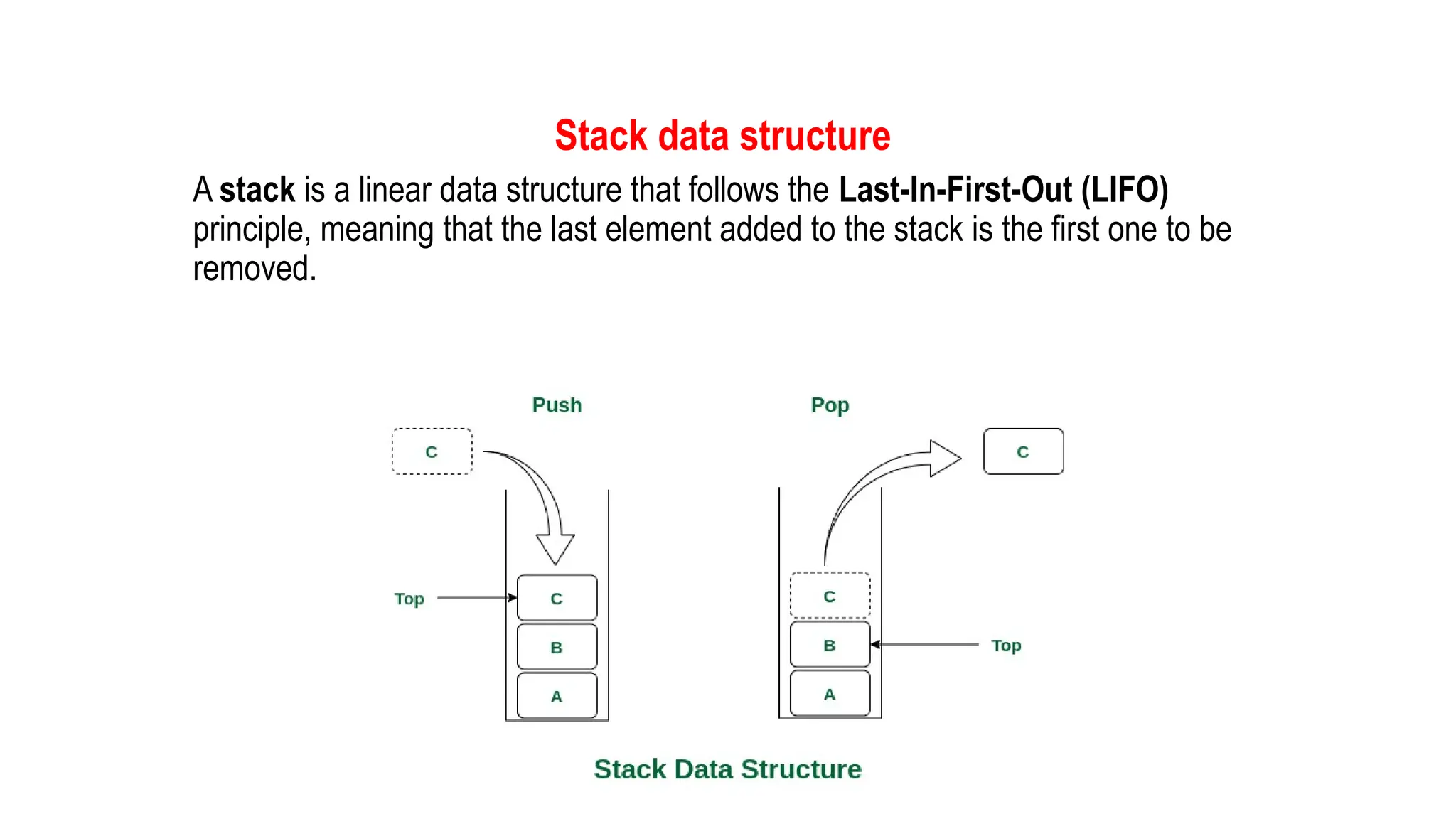
Stack data structure
Astack is a linear data structure that follows the Last-In-First-Out (LIFO)
principle, meaning that the last element added to the stack is the first one to be
removed.
9.
Types of Stacks& Operations
Fixed Size Stack: Has a predefined size; causes overflow if full and underflow if empty.
Dynamic Size Stack: Grows or shrinks dynamically; usually implemented using linked
lists.
Common Stack Operations:
push() – Add element
pop() – Remove and return top element
top() – View top element
size() – Get number of elements
Is Empty() – Check if stack is empty
10.
Queue Data Structure
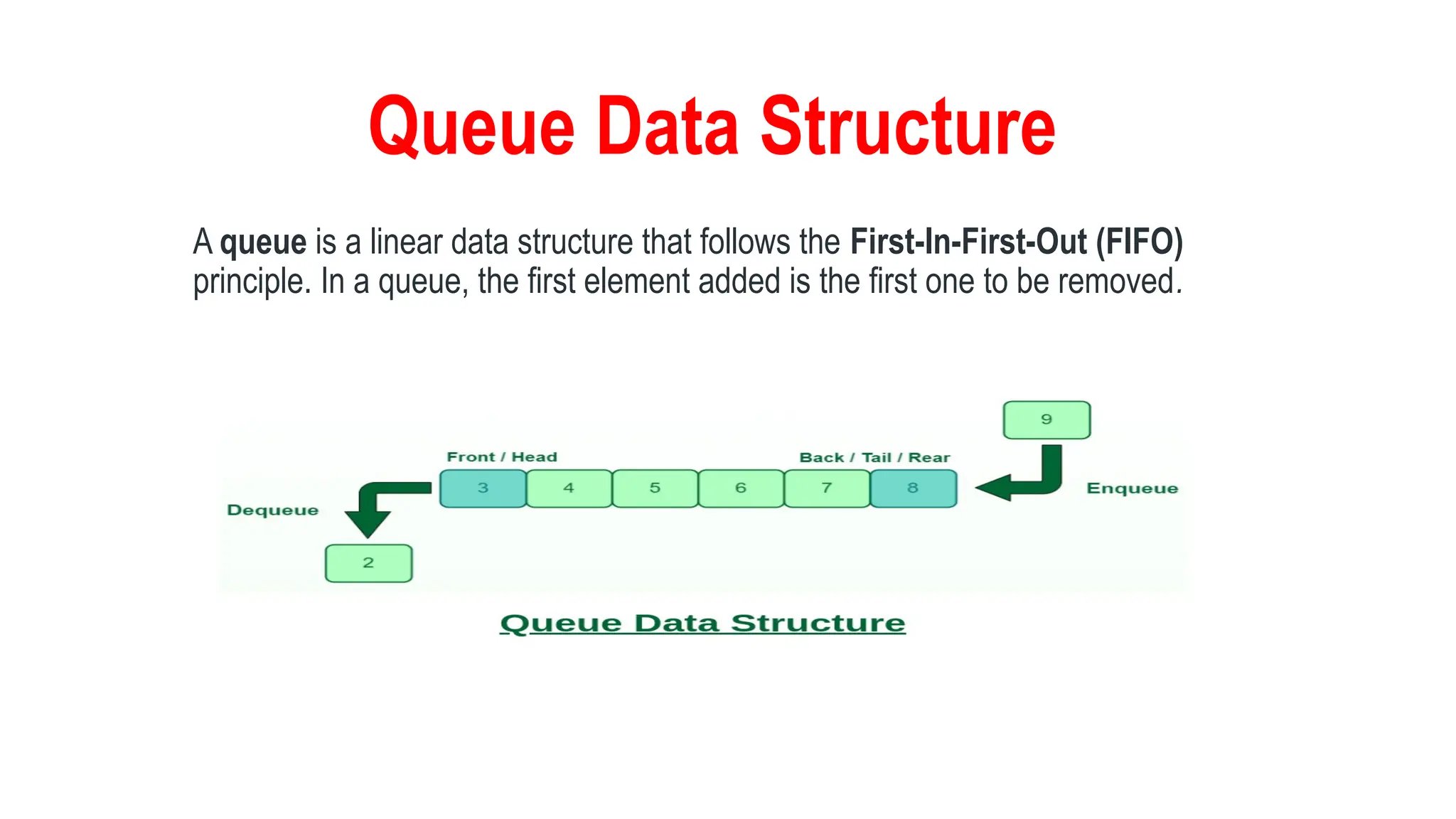
Aqueue is a linear data structure that follows the First-In-First-Out (FIFO)
principle. In a queue, the first element added is the first one to be removed.
11.
Types of queue&Operations
Types of Queues & Operations
Input Restricted Queue: Insertion at one end, deletion at both ends.
Output Restricted Queue: Insertion at both ends, deletion at one end.
Circular Queue: Last position is connected to the first; uses FIFO.
Double-Ended Queue (Deque): Insertion and deletion at both ends.
Priority Queue: Elements are served based on priority.
Common Queue Operations:
•enqueue() – Add element
•dequeue() – Remove front element
•peek()/front() – View front element
•rear() – View rear element
12.
Nonlinear Data Structures
•Elements are arranged hierarchically or in a
graph-like manner.
• No strict sequence between elements.
Examples:
Trees (e.g., Binary Tree, BST, Heap)
Graphs (Directed, Undirected)
13.
Tree Data Structure
Ahierarchical structure with a root and child nodes; used to represent
relationships efficiently.
Types of Trees:
Simple Tree: One root, multiple children; no cycles.
Binary Tree: Max two children per node.
Binary Search Tree (BST): Left < Parent < Right.
AVL Tree: Self-balancing BST with height difference ≤ 1.
B-Tree: Multi-child, balanced tree for fast search, insert, delete.
14.
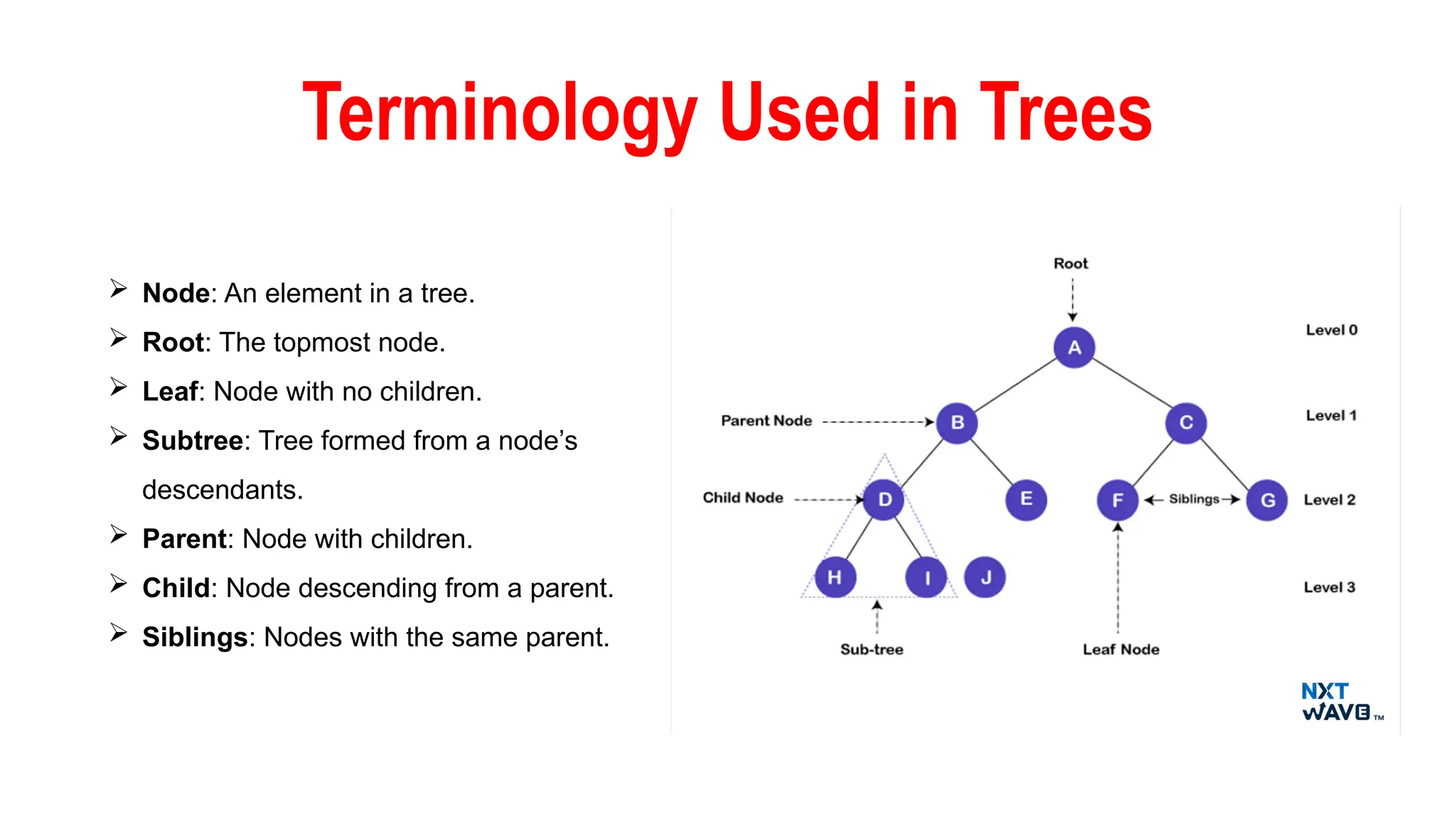
Terminology Used inTrees
Node: An element in a tree.
Root: The topmost node.
Leaf: Node with no children.
Subtree: Tree formed from a node’s
descendants.
Parent: Node with children.
Child: Node descending from a parent.
Siblings: Nodes with the same parent.
15.
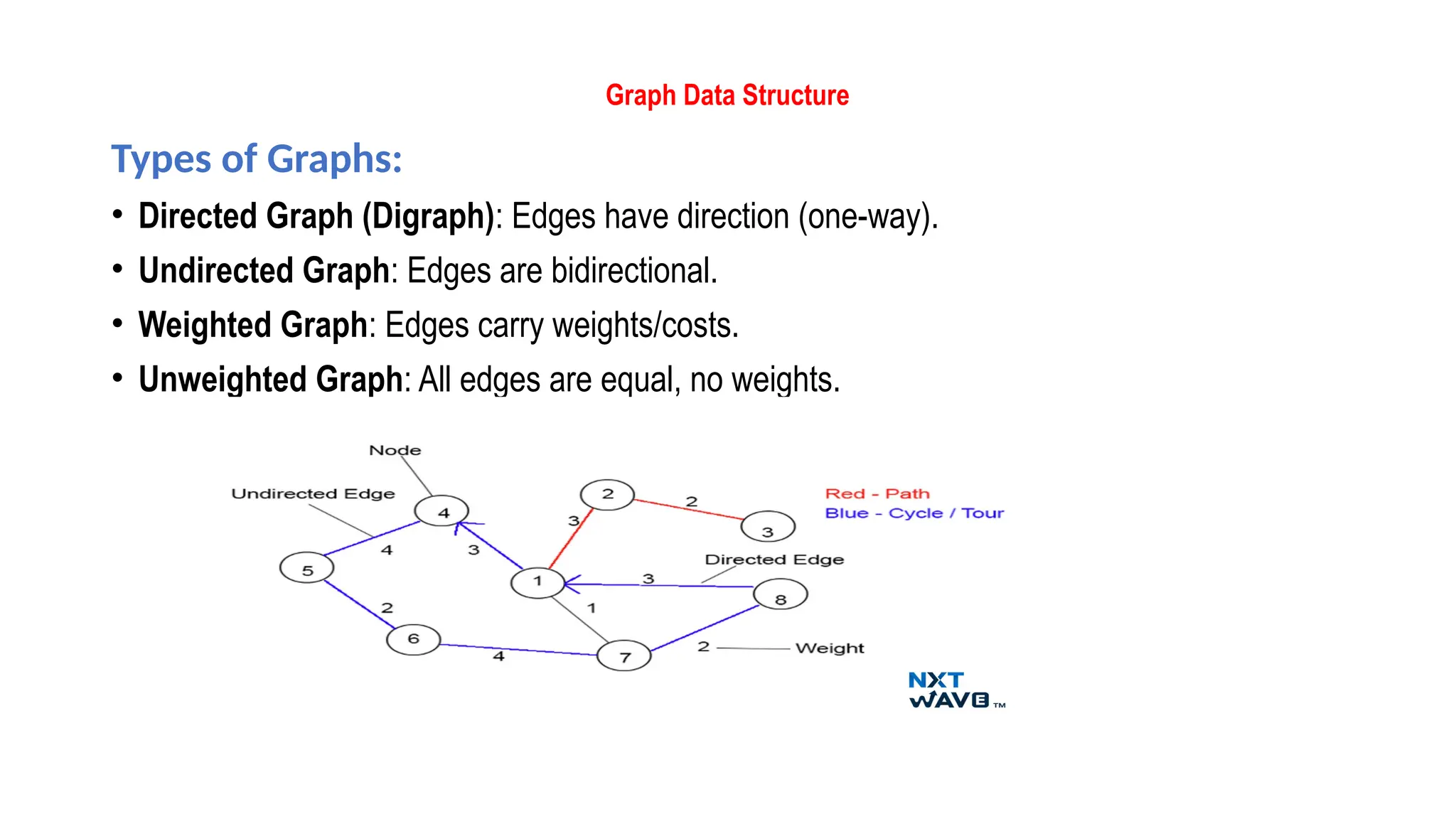
Graph Data Structure
Typesof Graphs:
• Directed Graph (Digraph): Edges have direction (one-way).
• Undirected Graph: Edges are bidirectional.
• Weighted Graph: Edges carry weights/costs.
• Unweighted Graph: All edges are equal, no weights.
16.
Algorithm
An algorithm isa step-by-step set of instructions to solve a problem or perform a task.
It is fundamental to computer science and crucial for designing efficient solutions in data
structures and programming.
Example:
Algorithm: Find the Largest Number in an Array
Problem:
Given an array of n numbers, find the largest number.
Algorithm Steps:
1.
Start
2.
Initialize max = arr[0]
3.
For each element arr[i] in the array (from index 1 to n-1):
a. If arr[i] > max, then max = arr[i]
4.
End loop
5.
Return max
6.
Stop
17.
Start
Initialize max ←arr[0]
For i ← 1 to n - 1 do
If arr[i] > max then
max ← arr[i]
End If
End For
Return max
Stop
Pseudocode for finding the maximum element in an array:
18.
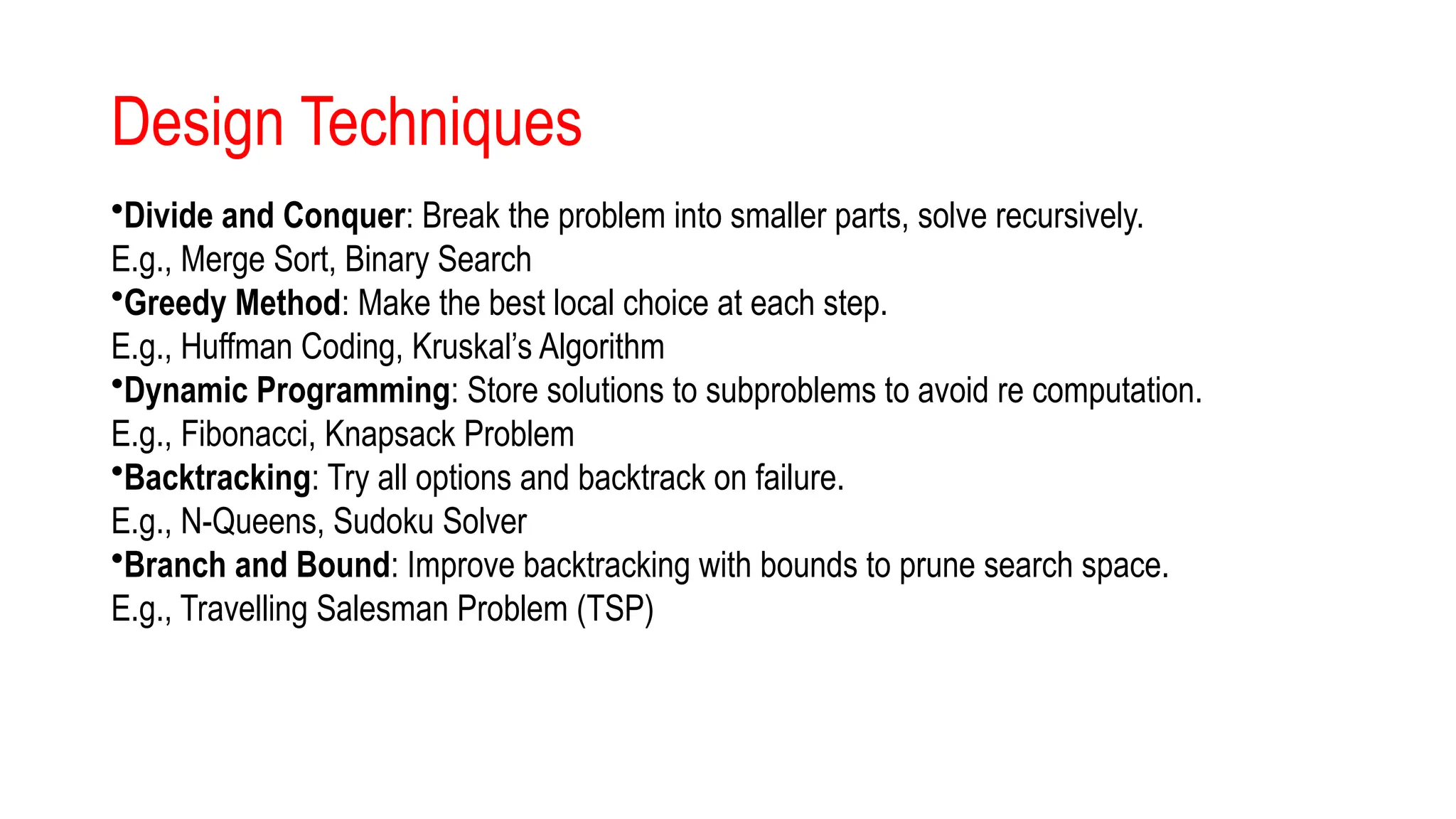
Design Techniques
•Divide andConquer: Break the problem into smaller parts, solve recursively.
E.g., Merge Sort, Binary Search
•Greedy Method: Make the best local choice at each step.
E.g., Huffman Coding, Kruskal’s Algorithm
•Dynamic Programming: Store solutions to subproblems to avoid re computation.
E.g., Fibonacci, Knapsack Problem
•Backtracking: Try all options and backtrack on failure.
E.g., N-Queens, Sudoku Solver
•Branch and Bound: Improve backtracking with bounds to prune search space.
E.g., Travelling Salesman Problem (TSP)
![Algorithm
An algorithm is a step-by-step set of instructions to solve a problem or perform a task.
It is fundamental to computer science and crucial for designing efficient solutions in data
structures and programming.
Example:
Algorithm: Find the Largest Number in an Array
Problem:
Given an array of n numbers, find the largest number.
Algorithm Steps:
1.
Start
2.
Initialize max = arr[0]
3.
For each element arr[i] in the array (from index 1 to n-1):
a. If arr[i] > max, then max = arr[i]
4.
End loop
5.
Return max
6.
Stop](https://image.slidesharecdn.com/ds-250531060311-8a419bf7/75/DATA-STRUCTURE-INTRODUCITON-FULL-NOTES-pptx-16-2048.jpg)
![Start
Initialize max ← arr[0]
For i ← 1 to n - 1 do
If arr[i] > max then
max ← arr[i]
End If
End For
Return max
Stop
Pseudocode for finding the maximum element in an array:](https://image.slidesharecdn.com/ds-250531060311-8a419bf7/75/DATA-STRUCTURE-INTRODUCITON-FULL-NOTES-pptx-17-2048.jpg)