More Related Content

PDF

PDF

PDF

PDF

PPTX

PDF

PDF

PPTX
Android DEX Format & DIFF (第4回マルウェア解析勉強会) What's hot

PPTX

PPTX

PPTX
C# 7.2 with .NET Core 2.1 
PPTX
C#や.NET Frameworkがやっていること 
PDF
Cookpad Summer Intern 2015 - Programming Paradigm 
PPTX
C# 8.0 Preview in Visual Studio 2019 (16.0) 
PDF

PDF

PDF

PDF

PDF
Boost.勉強会#19東京 Effective Modern C++とC++ Core Guidelines 
PDF

PPTX

PPTX

PDF
Code Reading at Security and Programming camp 2011 
PPTX

PPT

PDF
PDF
Similar to Dalvikバイトコードリファレンスの読み方 改訂版

PDF
2011.09.18 v7から始めるunix まとめ 
PDF

PDF

PDF
Adaptive optimization of JIT compiler 
PPTX

PDF

PDF

PDF
静かに変わってきたクラスファイルを詳細に調べて楽しむ(JJUG CCC 2024 Fall講演資料) 
PDF
バイトコードって言葉をよく目にするけど一体何なんだろう?(JJUG CCC 2022 Spring 発表資料) 
PPTX
jvmlang.daitokai 1.0.0 MinCamlJを作ってみた 
PDF

PPTX

PDF
asm.js x emscripten: The foundation of the next level Web games 
PPT

PDF

PDF
20171212 titech lecture_ishizaki_public 
PDF
Synthesijer and Synthesijer.Scala in HLS-friends 201512 
PPTX

PDF
Var handles jjug_ccc_spring_2018 
PDF
InvokeDynamic at #shikadriven 2012 More from Takuya Matsunaga

PDF

PDF

PDF

PDF

PPTX

PPTX

PDF

PDF
Recently uploaded

PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと... 
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool 
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ 
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup 
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2 
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1 Dalvikバイトコードリファレンスの読み方 改訂版
- 1.
- 2.
自己紹介
上での活動
Web上での活動
・ハンドルネーム : kmt-t
・はてなダイアリ ID : kmt-t2
・Twitter ID : kmt_t
属性
属性
・鳥取県から大阪に出稼ぎ中です
・組み込みプログラマらしい
・組み込みプログラマらしい
・ミドルウェアが得意です
・ミドルウェアが得意です
→画像処理(2D/3D)、ファイルシステム、仮想マシンが専門です
→画像処理(2D/3D)、ファイルシステム、仮想マシンが専門です
・使用言語はC++(not C)/C#/Python
・使用言語はC++(not C)/C#/Python
→C++11とかC#の最新の仕様がキャッチアップできていません
→C++11とかC#の最新の仕様がキャッチアップできていません
- 3.
発表の構成
仮想マシン3部作
Dalvik仮想マシン 部作
仮想マシン
Dalvik仮想マシンの発表を以下の3回にわけて行います
1. Dalvik仮想マシンのアーキテクチャ
2. Dalvikバイトコードのリファレンスの読み方 ←今回はここの発表
バイトコードのリファレンスの読み方
3. DEXファイルフォーマット
発表の目的
仮想マシンのソースコードが誰でも読めるようにする
1. Dalvik仮想マシンのソースコードが誰でも読めるようにする
仮想マシンに対するみんなのリテラシを上げる
2. Dalvik仮想マシンに対するみんなのリテラシを上げる
3. より深い部分の発表をするための下地をつくる
- 4.
本日の発表の概要
バイトコードリファレンスの読み方
Dalvikバイトコードリファレンスの読み方
・Dalvikバイトコードの命令バイナリフォーマット
・Dalvikバイトコード命令に対応する実装
→リファレンスから実装をトレースできるように
リファレンスから実装をトレースできるように
リファレンス
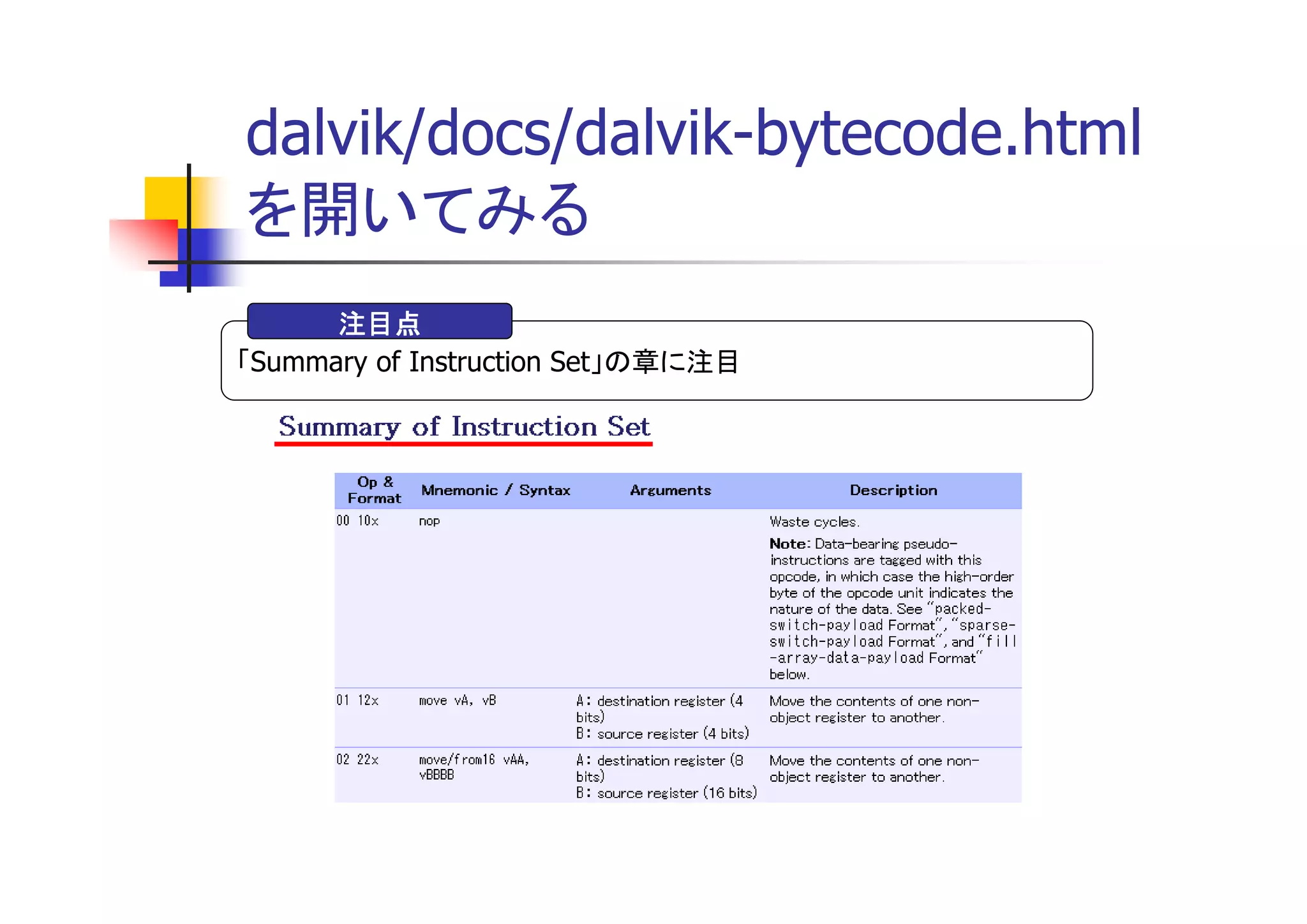
・dalvik/docs/dalvik-bytecode.html (概略リファレンス ←注目
概略リファレンス)
概略リファレンス
・dalvik/docs/instruction-formats.html (バイナリフォーマット)
・dalvik/docs/opcodeディレクトリ以下 (セマンティクス)
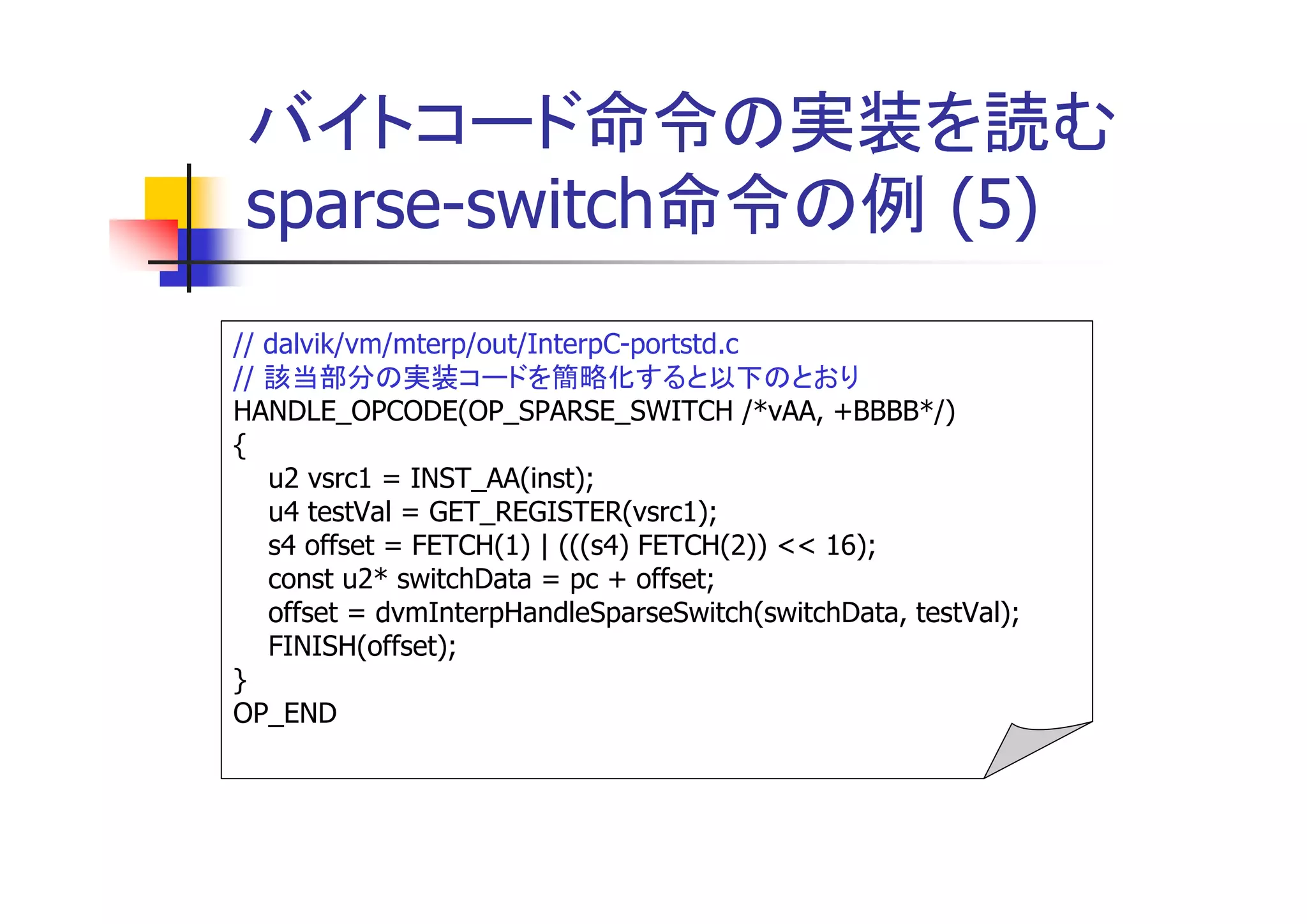
実装
今回はC言語バージョンの実装を参照
・dalvik/vm/mterp/out/InterpC-portstd.c
- 5.
- 6.
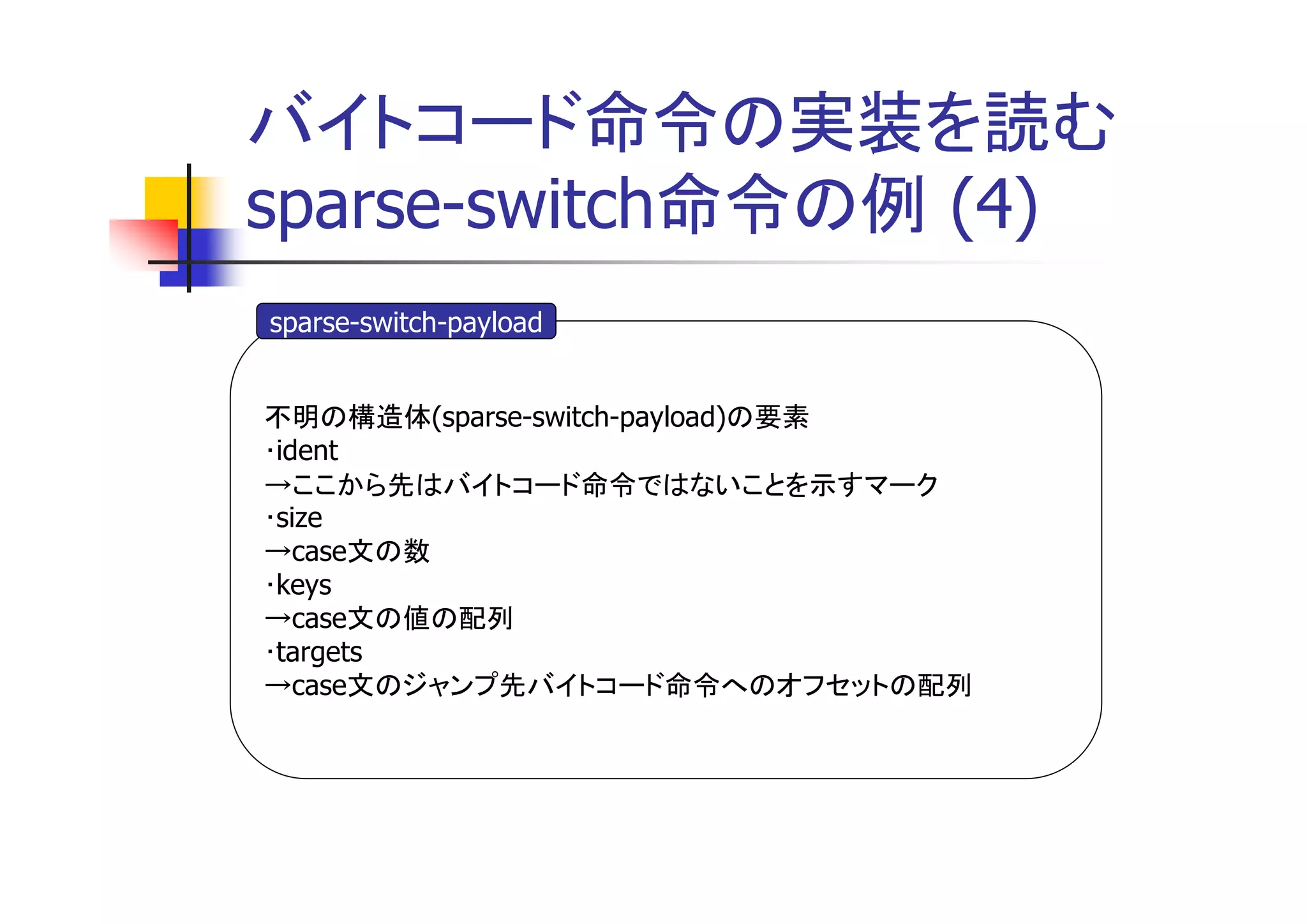
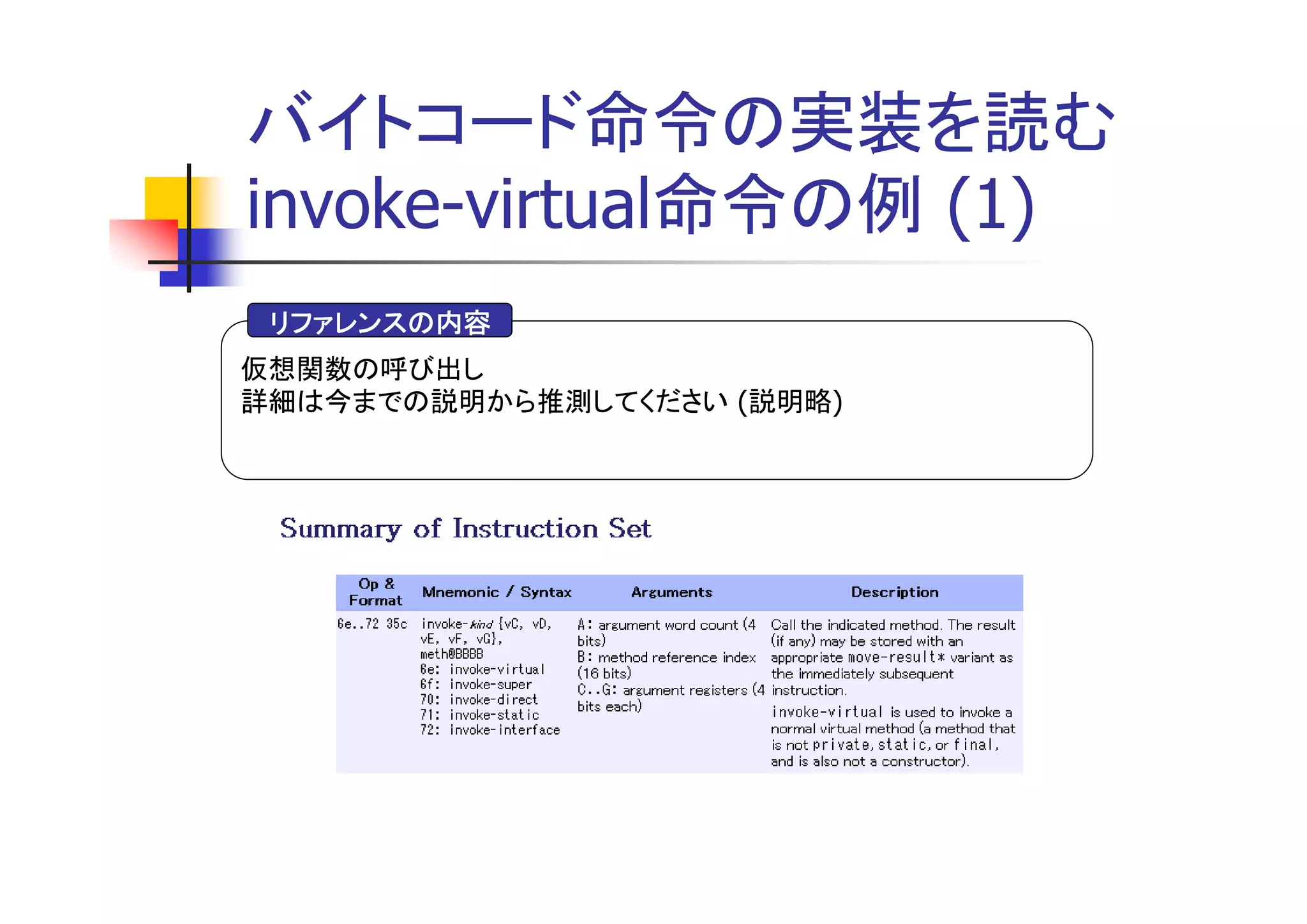
記述されている内容
表の列
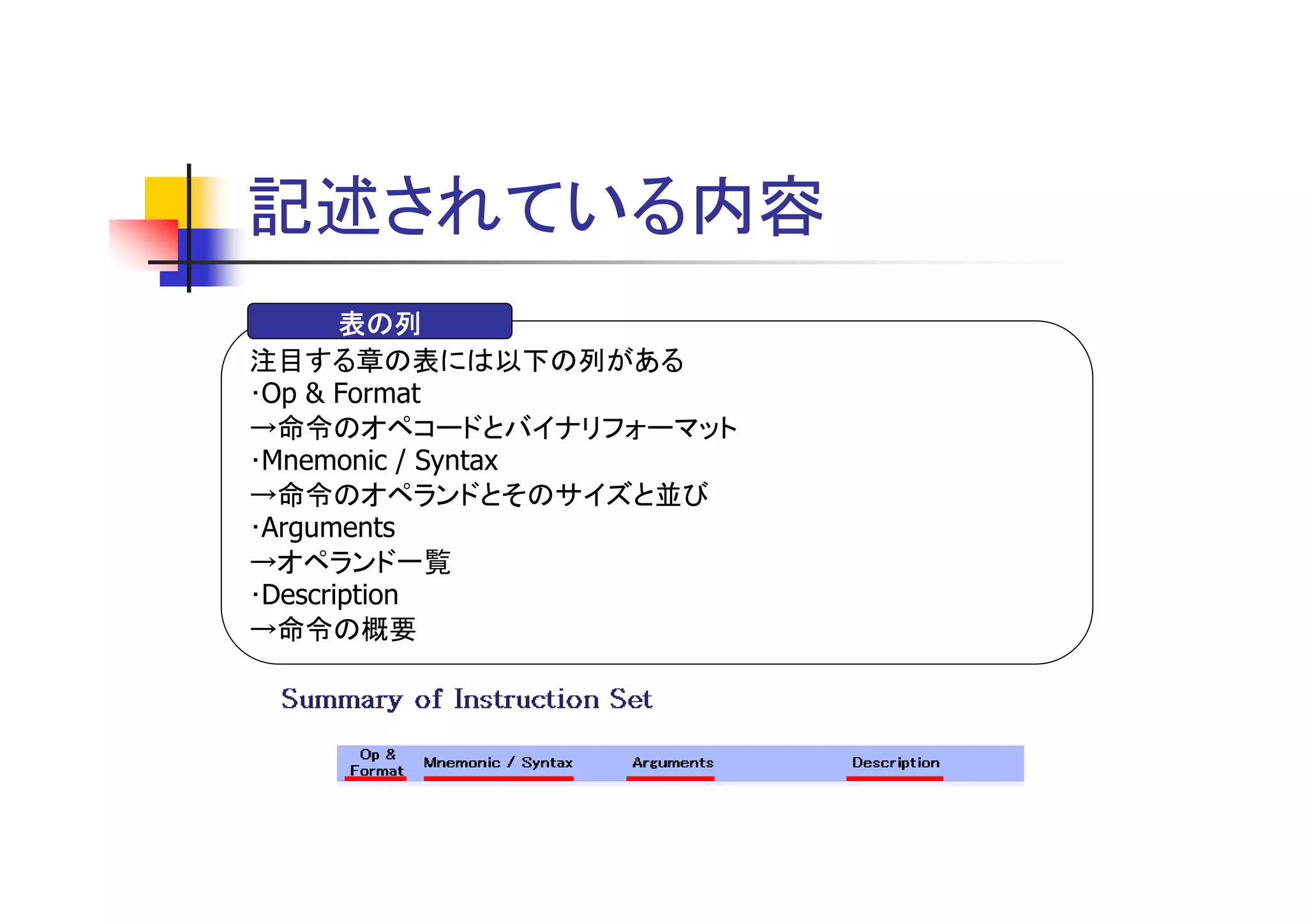
注目する章の表には以下の列がある
・Op & Format
→命令のオペコードとバイナリフォーマット
・Mnemonic / Syntax
→命令のオペランドとそのサイズと並び
・Arguments
→オペランド一覧
・Description
→命令の概要
- 7.
Op & Format
列の意味
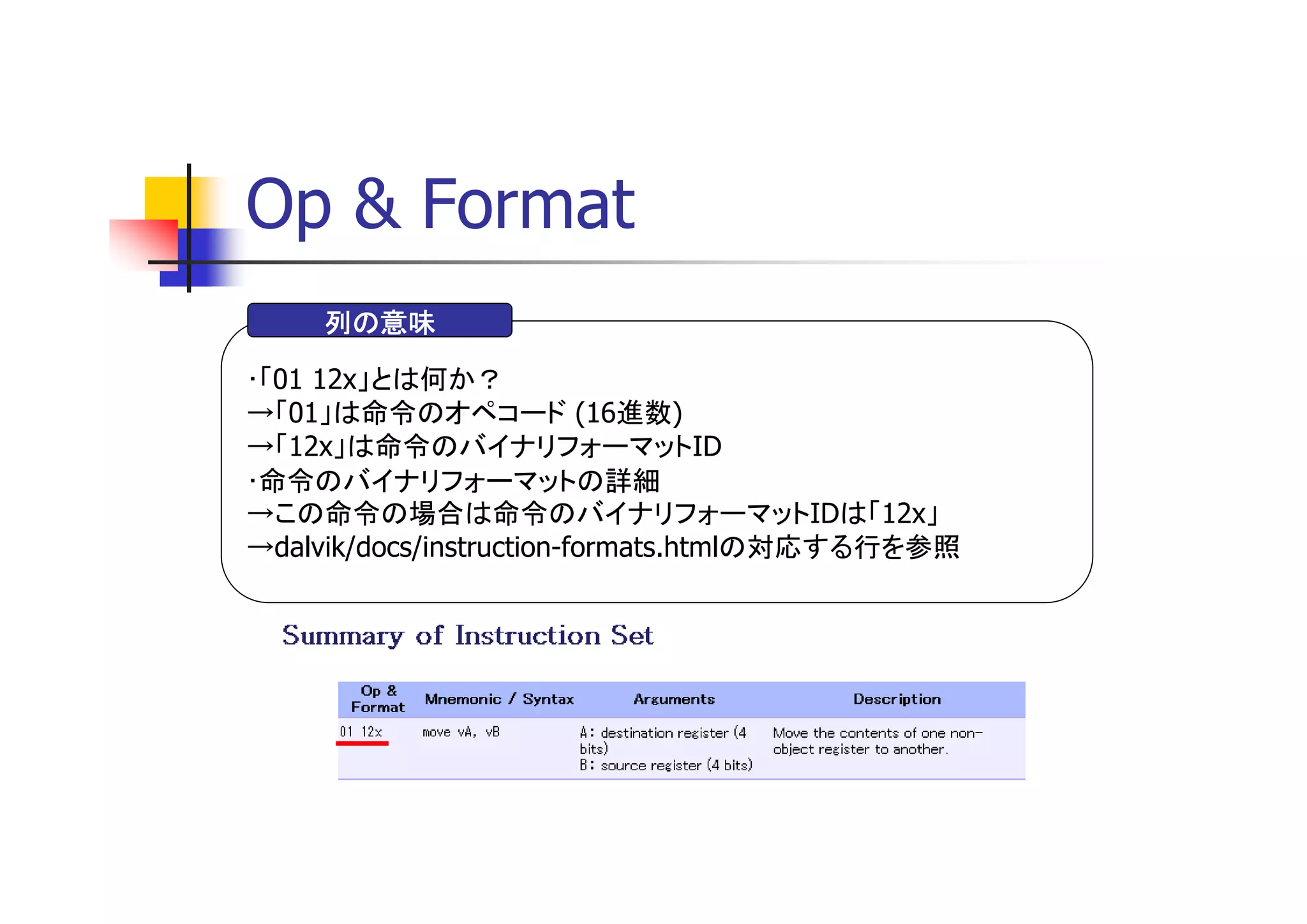
・「01 12x」とは何か?
→「01」は命令のオペコード (16進数)
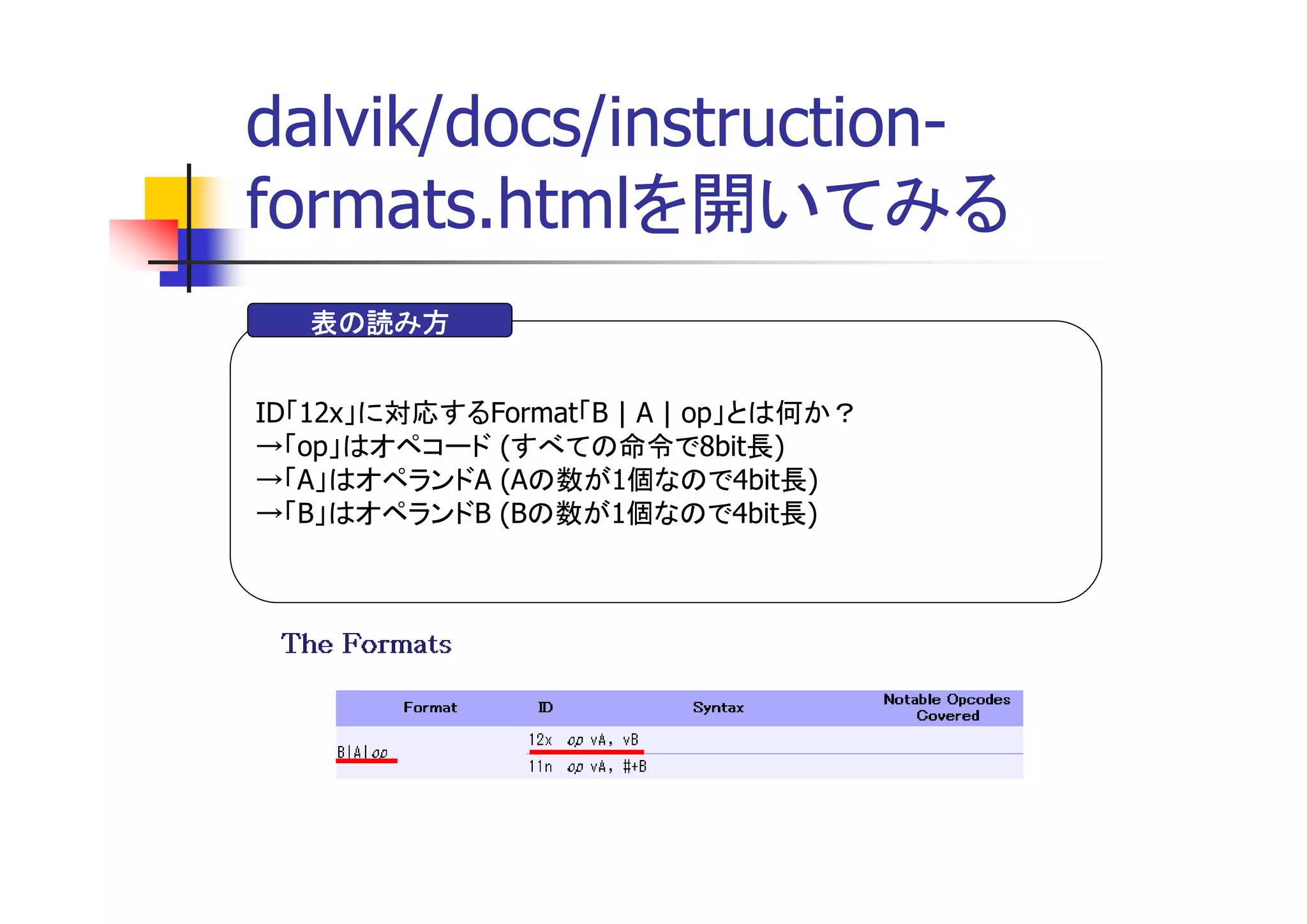
→「12x」は命令のバイナリフォーマットID
・命令のバイナリフォーマットの詳細
→この命令の場合は命令のバイナリフォーマットIDは「12x」
→dalvik/docs/instruction-formats.htmlの対応する行を参照
- 8.
Mnemonic / Syntax
列の意味
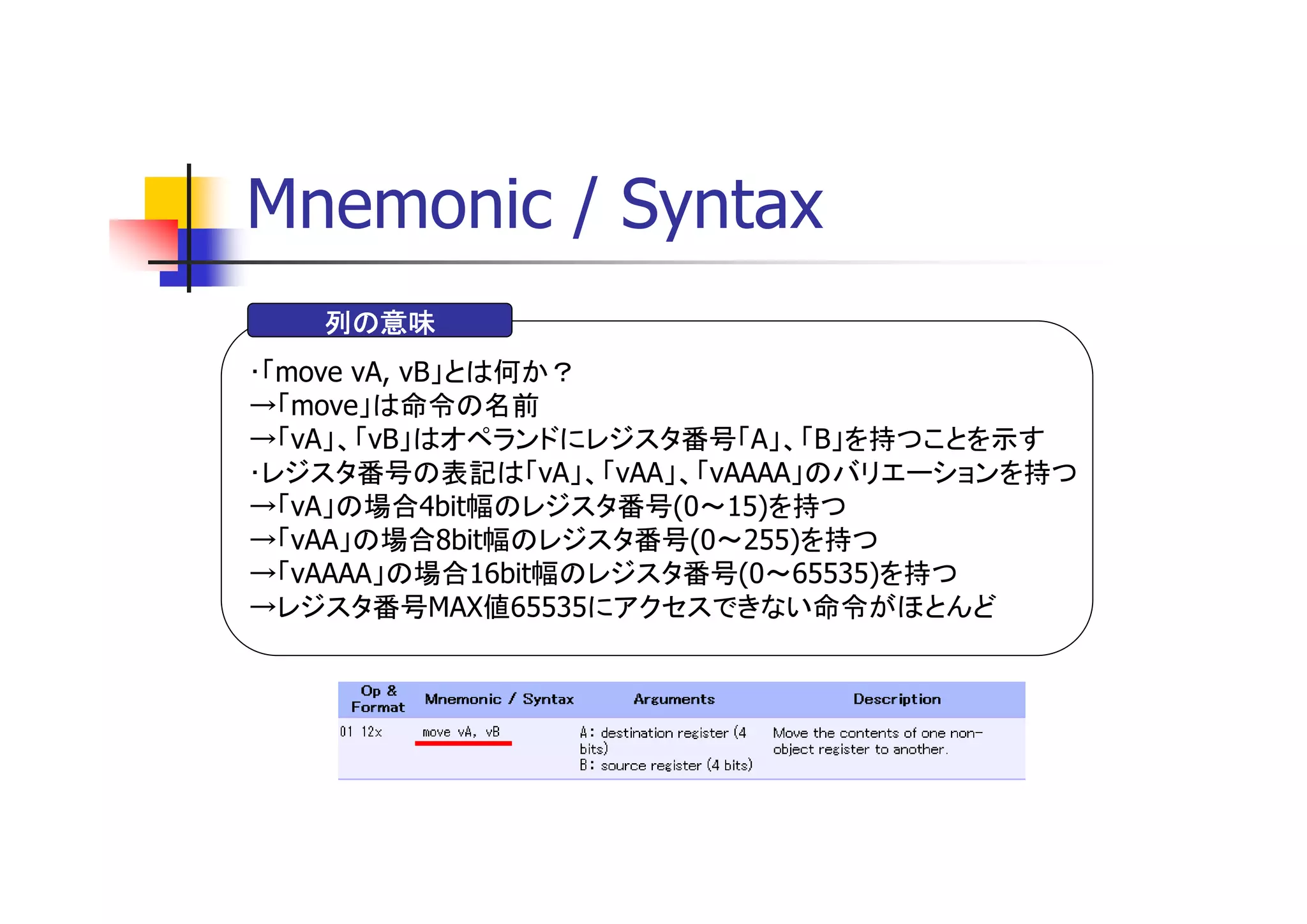
・「move vA, vB」とは何か?
→「move」は命令の名前
→「vA」、「vB」はオペランドにレジスタ番号「A」、「B」を持つことを示す
・レジスタ番号の表記は「vA」、「vAA」、「vAAAA」のバリエーションを持つ
→「vA」の場合4bit幅のレジスタ番号(0~15)を持つ
→「vAA」の場合8bit幅のレジスタ番号(0~255)を持つ
→「vAAAA」の場合16bit幅のレジスタ番号(0~65535)を持つ
→レジスタ番号MAX値65535にアクセスできない命令がほとんど
- 9.
Arguments
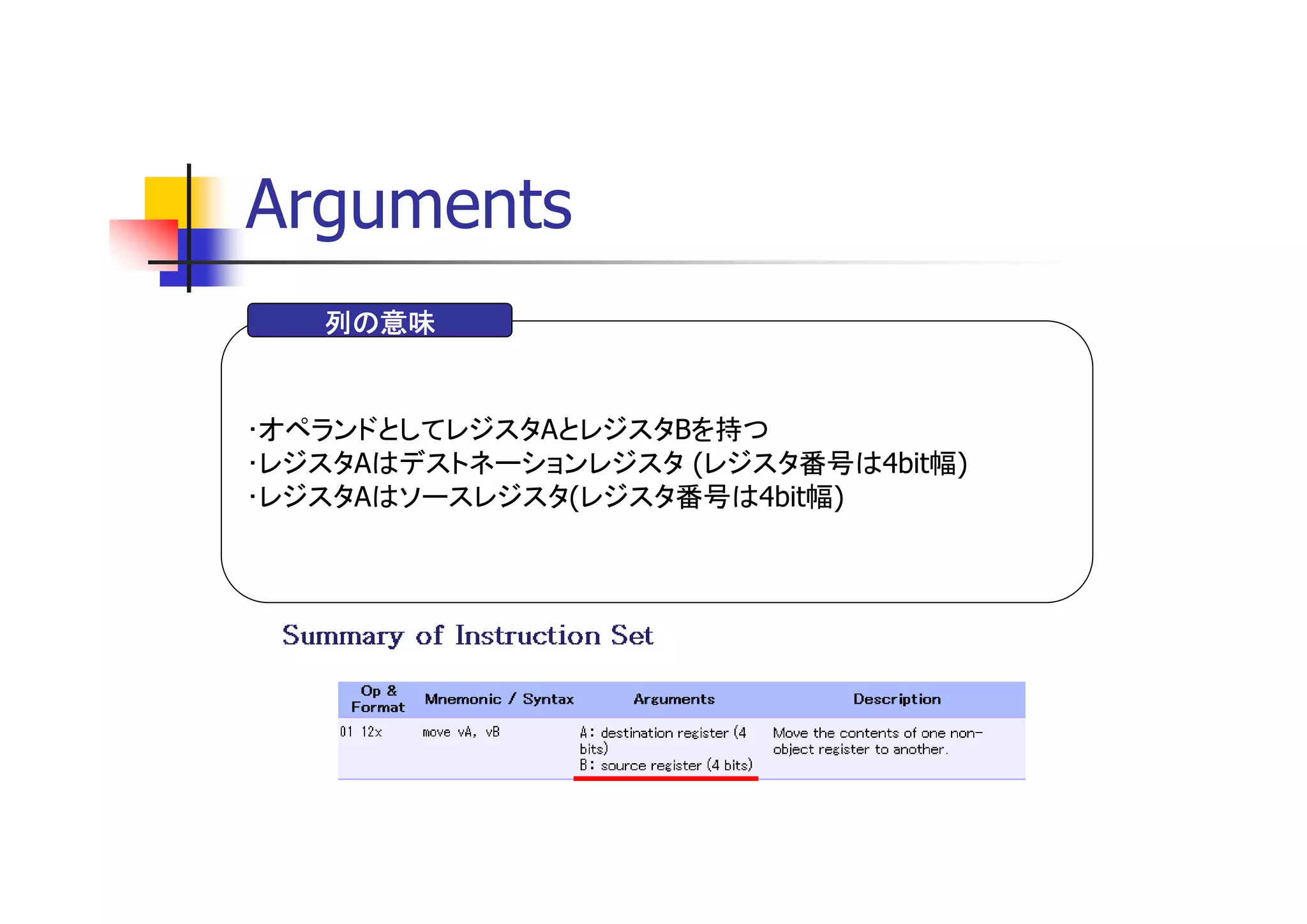
列の意味
・オペランドとしてレジスタAとレジスタBを持つ
・レジスタAはデストネーションレジスタ (レジスタ番号は4bit幅)
・レジスタAはソースレジスタ(レジスタ番号は4bit幅)
- 10.
Description
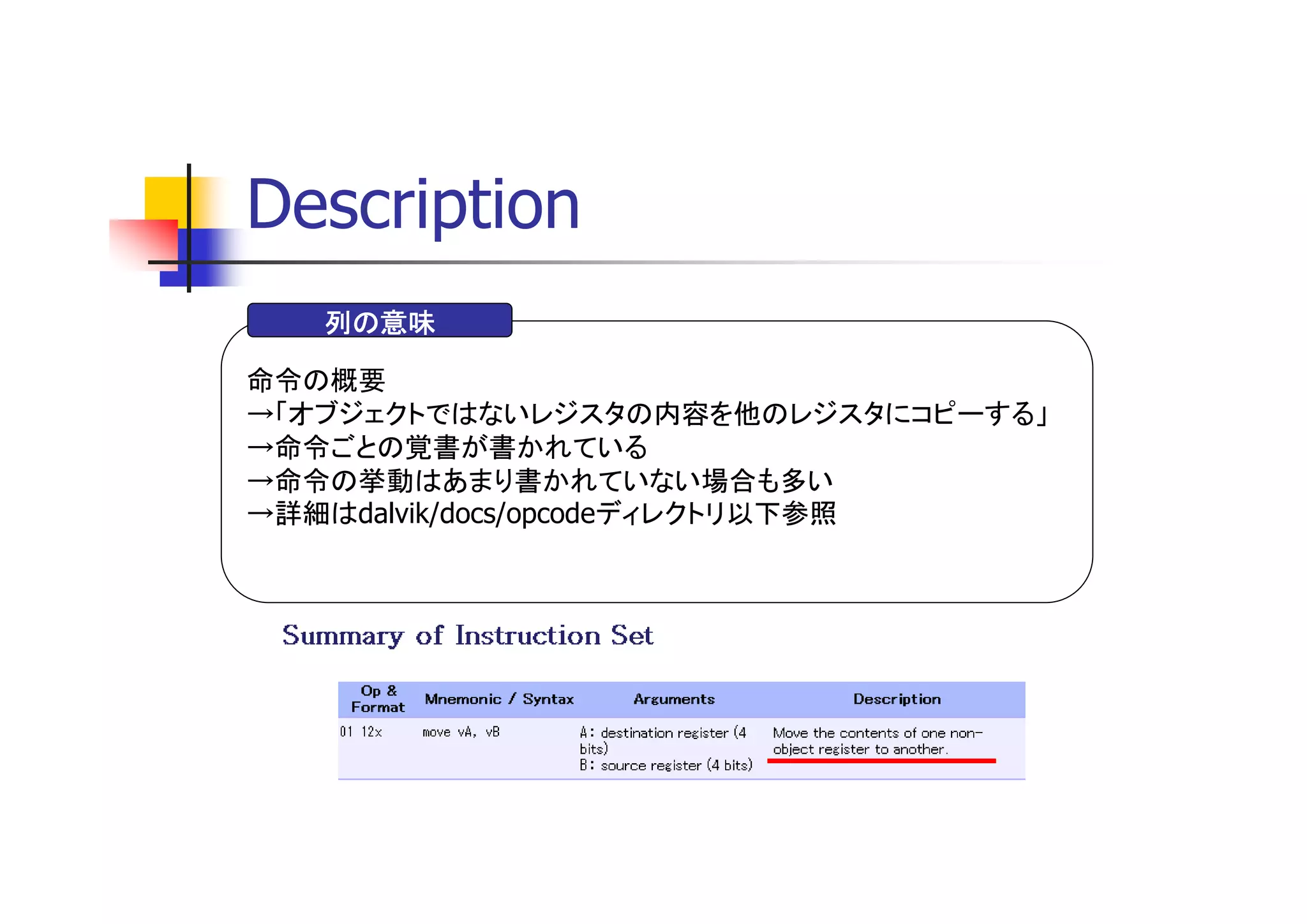
列の意味
命令の概要
→「オブジェクトではないレジスタの内容を他のレジスタにコピーする」
→命令ごとの覚書が書かれている
→命令の挙動はあまり書かれていない場合も多い
→詳細はdalvik/docs/opcodeディレクトリ以下参照
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
- 19.
- 20.
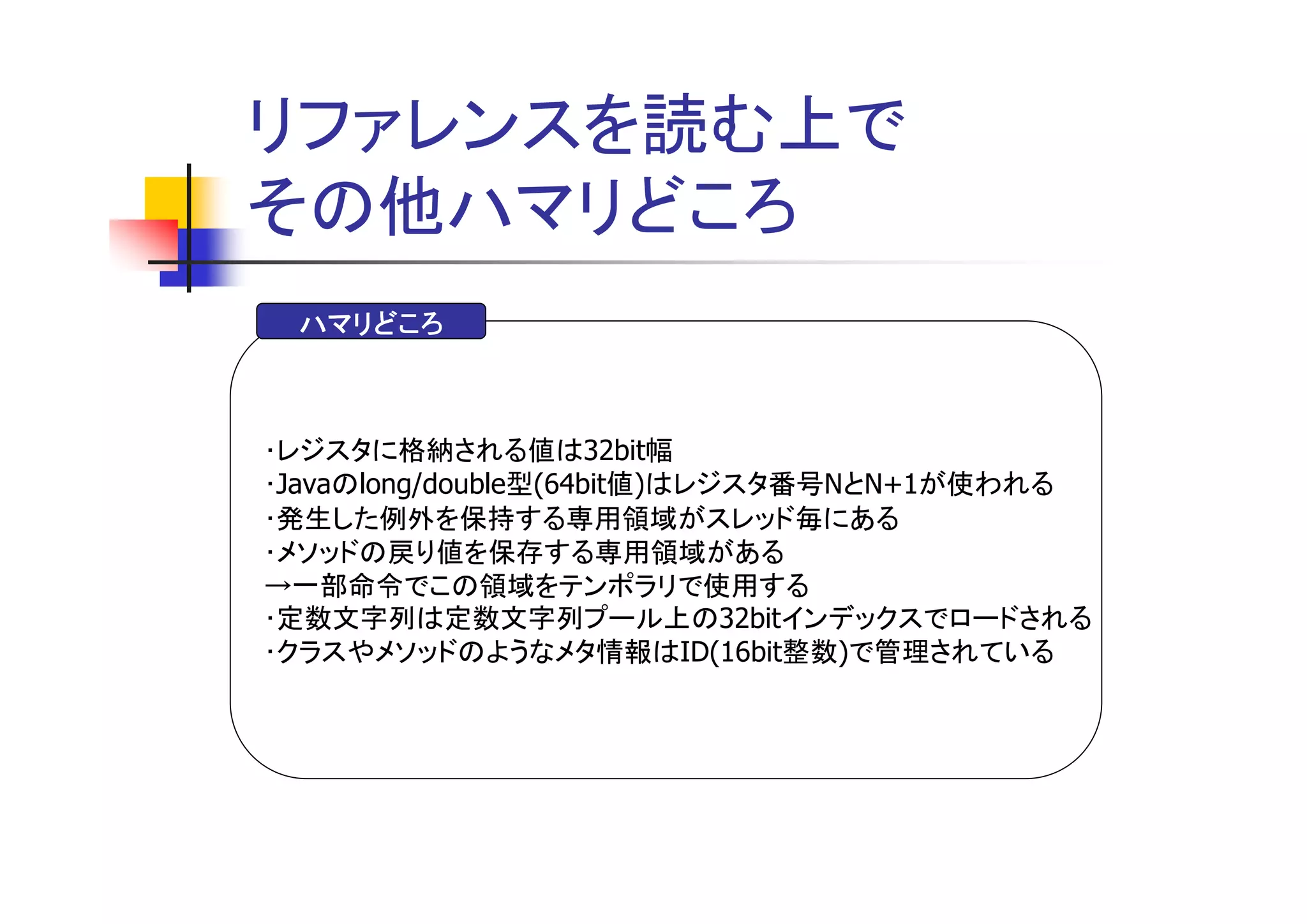
バイトコード命令の実装を読む
invoke-virtual命令の例 (2)
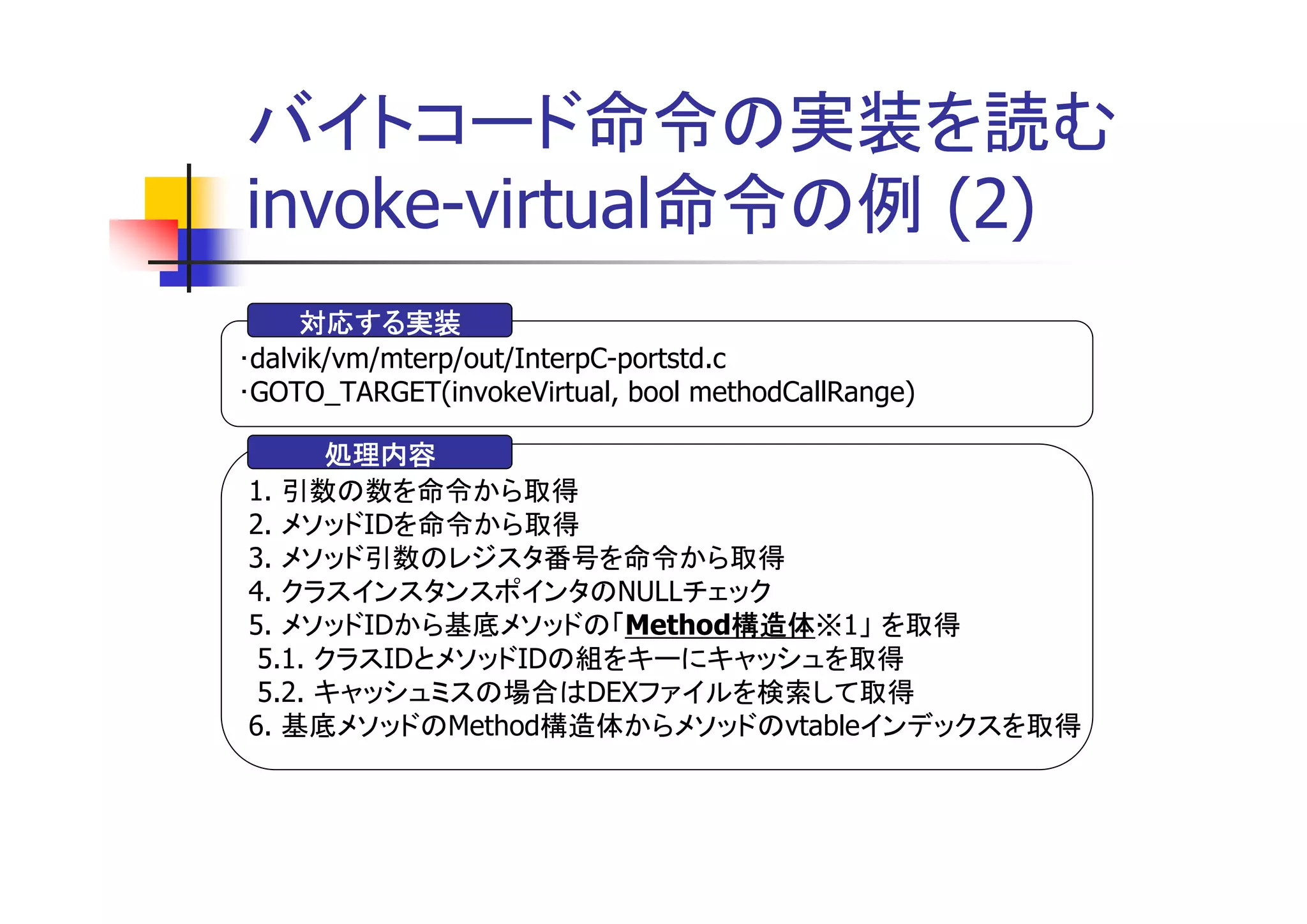
対応する実装
・dalvik/vm/mterp/out/InterpC-portstd.c
・GOTO_TARGET(invokeVirtual, bool methodCallRange)
処理内容
1. 引数の数を命令から取得
2. メソッドIDを命令から取得
3. メソッド引数のレジスタ番号を命令から取得
4. クラスインスタンスポインタのNULLチェック
5. メソッドIDから基底メソッドの「Method構造体
構造体※1」 を取得
構造体
5.1. クラスIDとメソッドIDの組をキーにキャッシュを取得
5.2. キャッシュミスの場合はDEXファイルを検索して取得
6. 基底メソッドのMethod構造体からメソッドのvtableインデックスを取得
- 21.
バイトコード命令の実装を読む
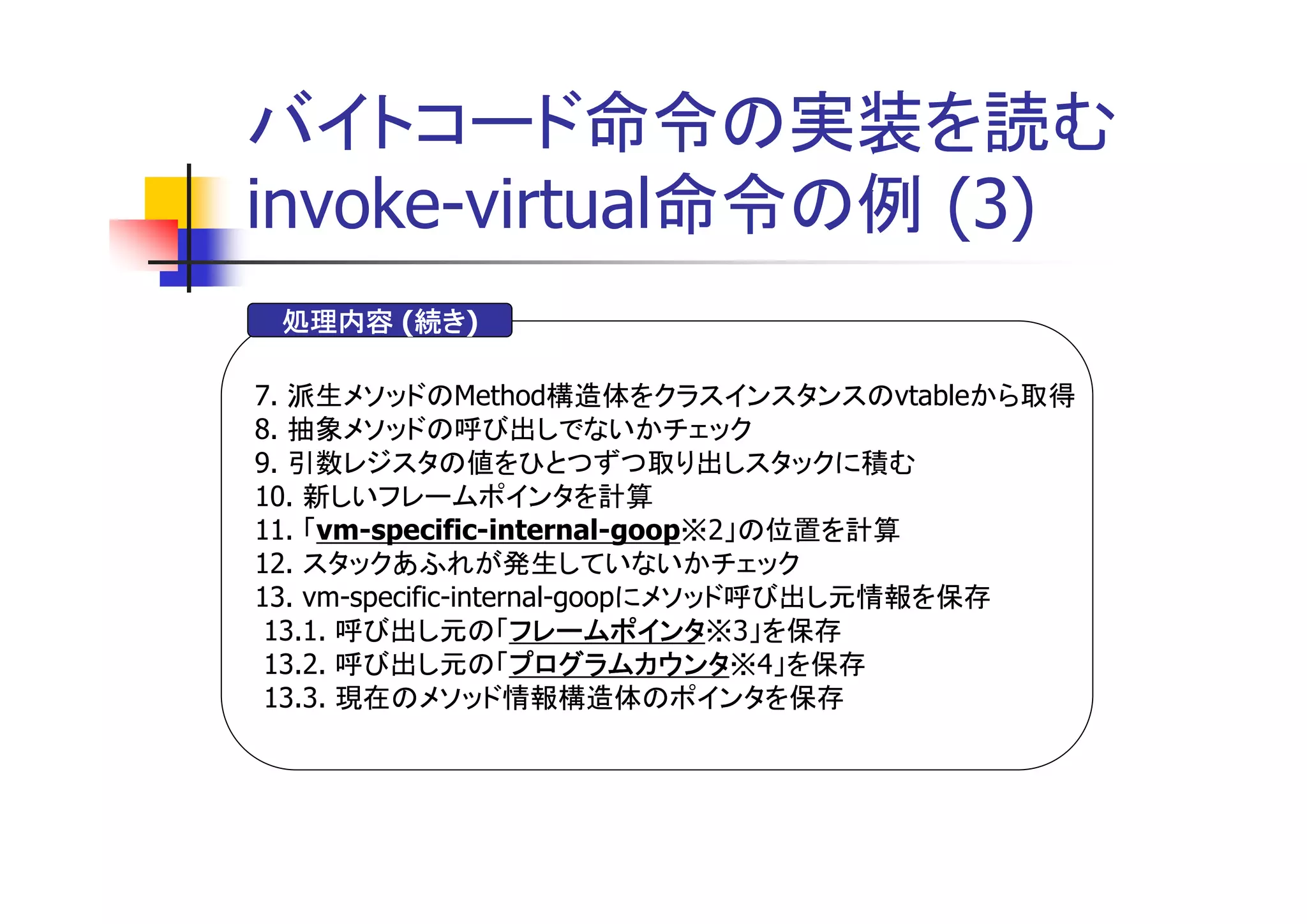
invoke-virtual命令の例 (3)
続き)
処理内容 (続き
続き
7. 派生メソッドのMethod構造体をクラスインスタンスのvtableから取得
8. 抽象メソッドの呼び出しでないかチェック
9. 引数レジスタの値をひとつずつ取り出しスタックに積む
10. 新しいフレームポインタを計算
11. 「vm-specific-internal-goop※2」の位置を計算
12. スタックあふれが発生していないかチェック
13. vm-specific-internal-goopにメソッド呼び出し元情報を保存
フレームポインタ※3」を保存
13.1. 呼び出し元の「フレームポインタ
フレームポインタ
13.2. 呼び出し元の「プログラムカウンタ
プログラムカウンタ※4」を保存
プログラムカウンタ
13.3. 現在のメソッド情報構造体のポインタを保存
- 22.
バイトコード命令の実装を読む
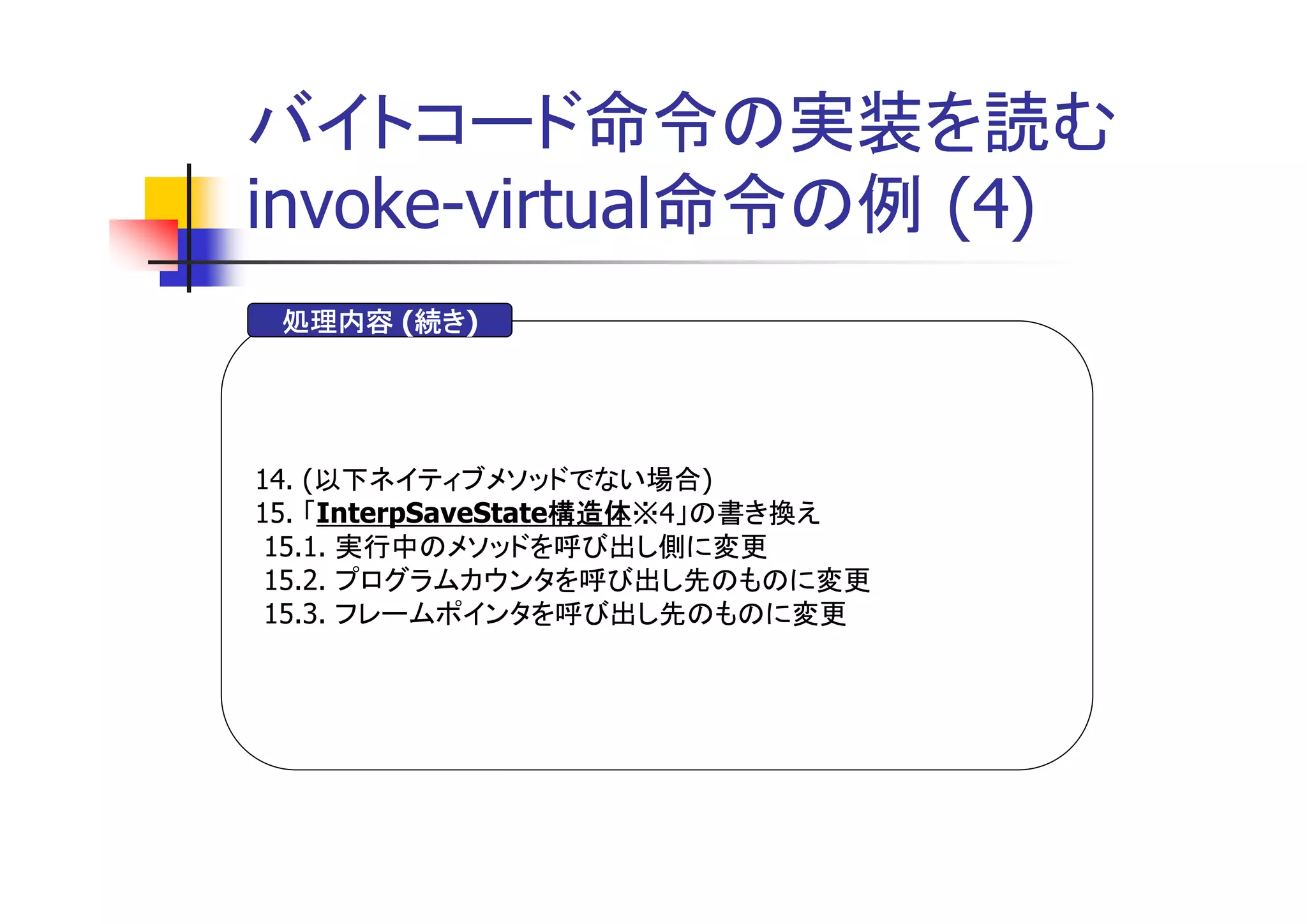
invoke-virtual命令の例 (4)
続き)
処理内容 (続き
続き
14. (以下ネイティブメソッドでない場合)
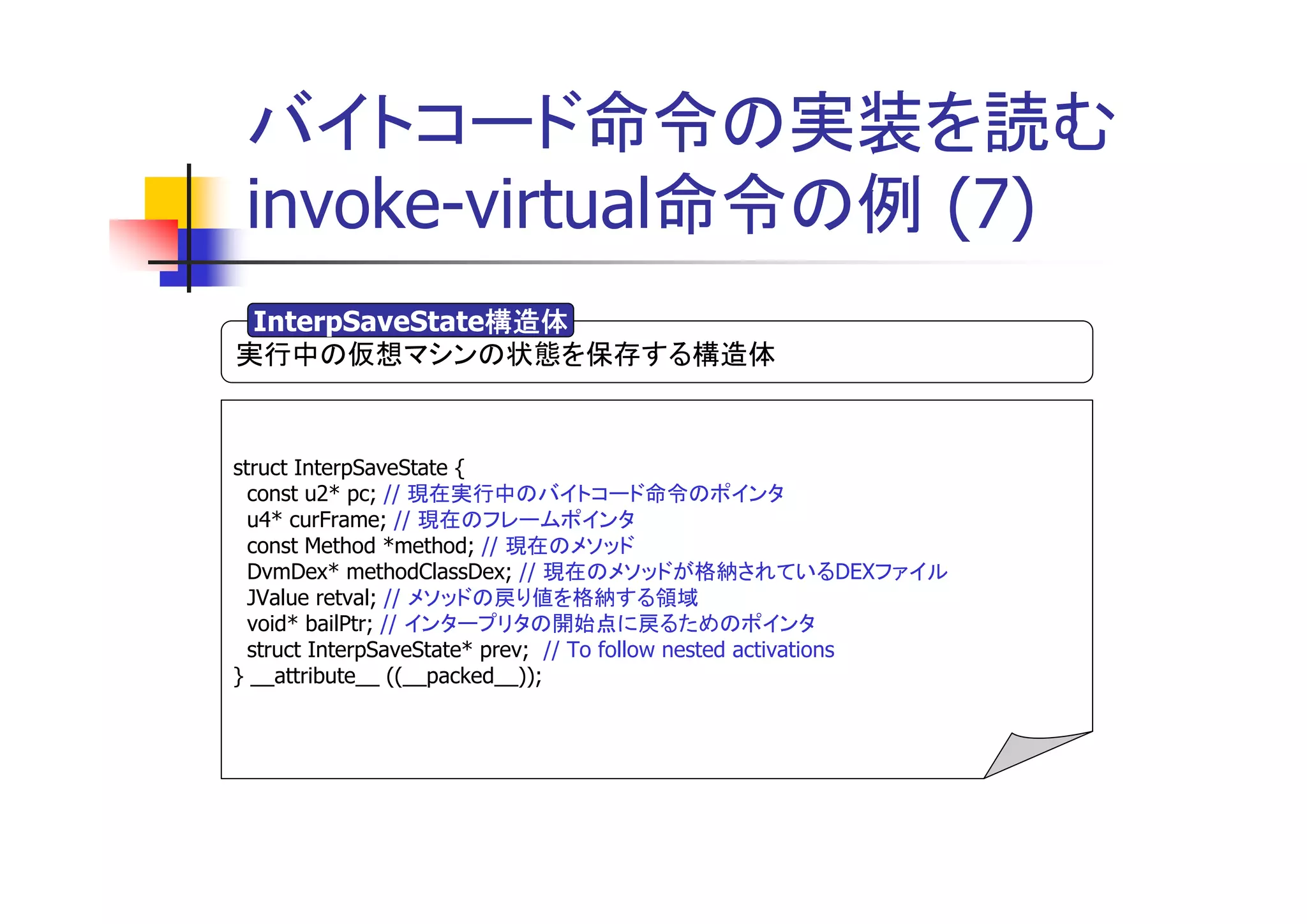
15. 「InterpSaveState構造体
構造体※4」の書き換え
構造体
15.1. 実行中のメソッドを呼び出し側に変更
15.2. プログラムカウンタを呼び出し先のものに変更
15.3. フレームポインタを呼び出し先のものに変更
- 23.
バイトコード命令の実装を読む
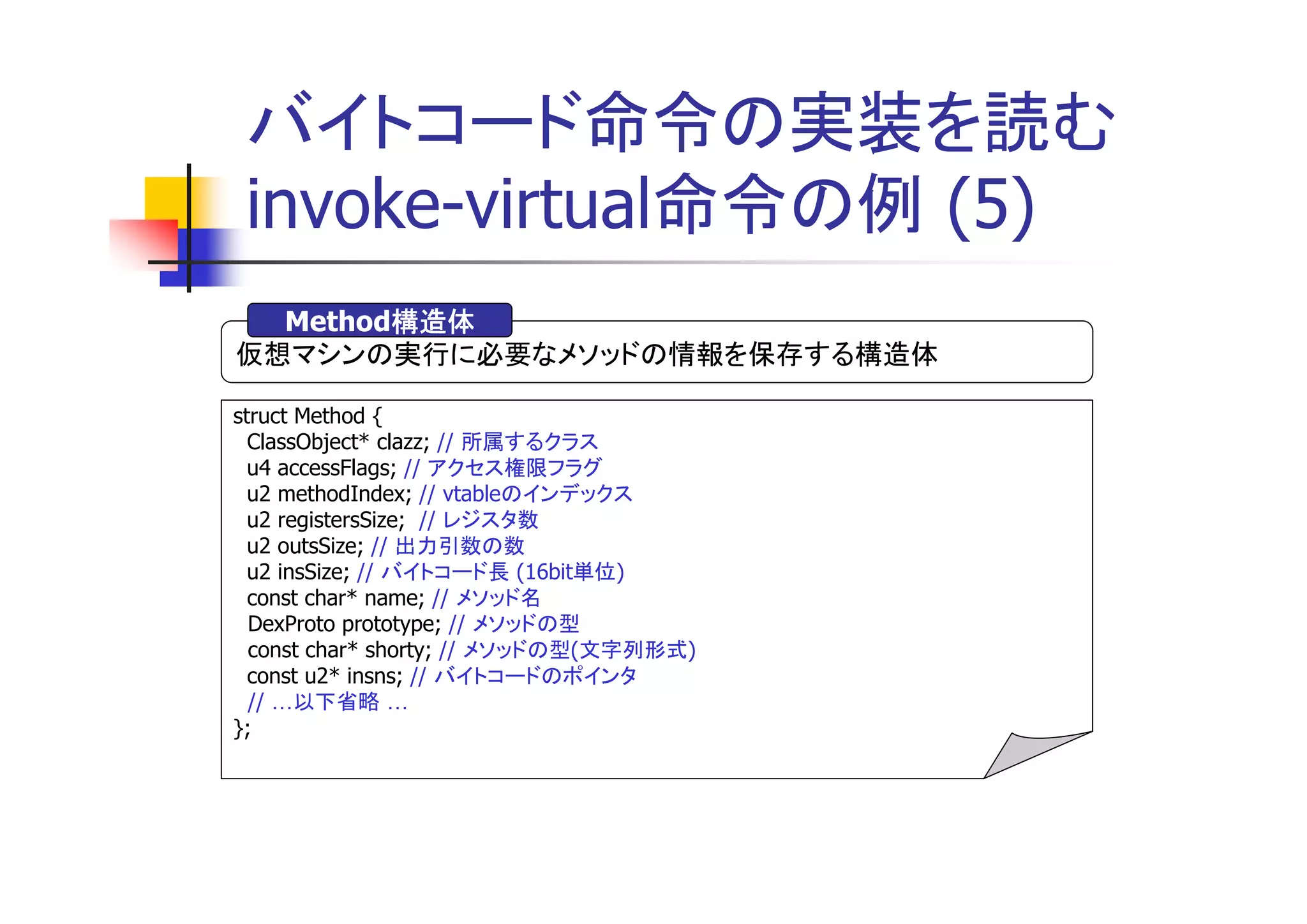
invoke-virtual命令の例 (5)
構造体
Method構造体
仮想マシンの実行に必要なメソッドの情報を保存する構造体
struct Method {
ClassObject* clazz; // 所属するクラス
u4 accessFlags; // アクセス権限フラグ
u2 methodIndex; // vtableのインデックス
u2 registersSize; // レジスタ数
u2 outsSize; // 出力引数の数
u2 insSize; // バイトコード長 (16bit単位)
const char* name; // メソッド名
DexProto prototype; // メソッドの型
const char* shorty; // メソッドの型(文字列形式)
const u2* insns; // バイトコードのポインタ
// 以下省略
};
- 24.
- 25.
- 26.
バイトコード命令の実装を読む
invoke-virtual命令の例 (7)
構造体
InterpSaveState構造体
実行中の仮想マシンの状態を保存する構造体
struct InterpSaveState {
const u2* pc; // 現在実行中のバイトコード命令のポインタ
u4* curFrame; // 現在のフレームポインタ
const Method *method; // 現在のメソッド
DvmDex* methodClassDex; // 現在のメソッドが格納されているDEXファイル
JValue retval; // メソッドの戻り値を格納する領域
void* bailPtr; // インタープリタの開始点に戻るためのポインタ
struct InterpSaveState* prev; // To follow nested activations
} __attribute__ ((__packed__));
- 27.
まとめ
まとめ
・バイトコードリファレンスの読み方はパターンがある
・バイトコードリファレンスを起点にして実装を読むと楽である
以上でバイトコードリファレンスが読めるようになり、かなり実装も追える
ようになるはず!
- 28.