Download as PDF, PPTX


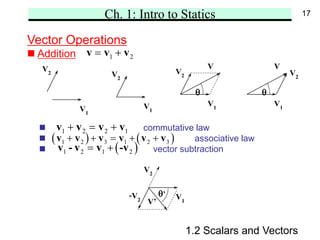

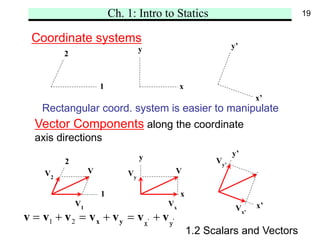

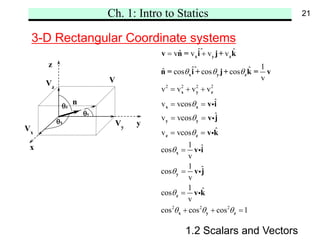



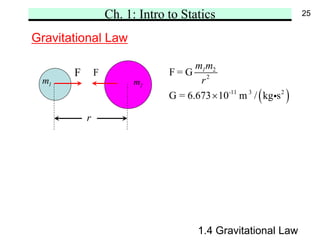


Chapter 1 introduces the fundamental concepts of statics, including space, time, mass, force, scalars, and vectors. It also outlines Newton's laws of motion and the gravitational law, highlighting the definitions of rigid and nonrigid bodies, and distinguishing between free, sliding, and fixed vectors. The chapter aims to establish a foundational understanding for analyzing the mechanics of static systems.



































































