Download to read offline
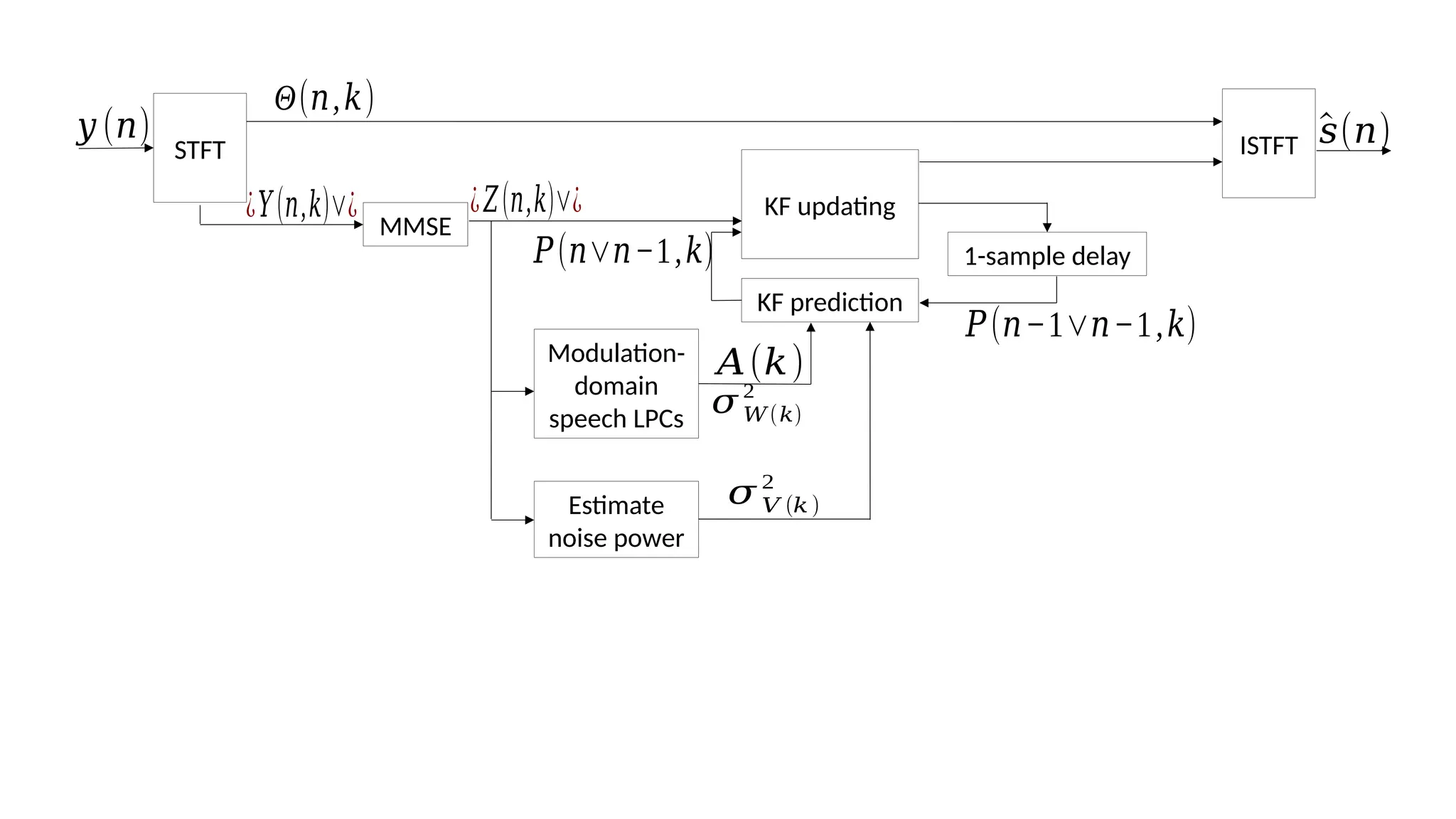
The document discusses methods related to modulation domain speech processing, including the estimation of noise power and updating Kalman filters (KF) for improved signal predictions. It highlights various equations and parameters integral to these processes. Overall, it emphasizes the technical aspects of speech signal enhancement.