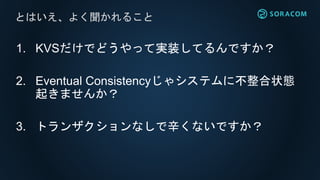
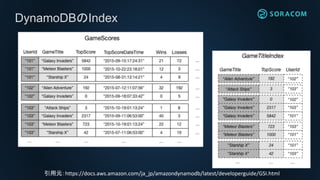
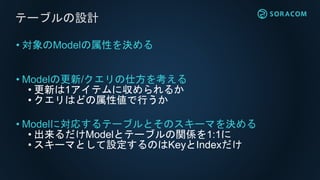
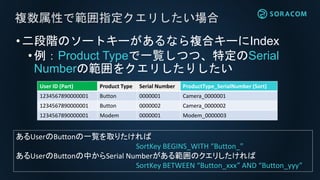
• IMSIは単独でPrimary Key
•Partition Keyのみのスキーマを選択
• GroupIdのGSIを作成
SubscriberテーブルにIndexを張る
IMSI (Part) OperatorID Status Group ID
1234567890000001 OP0012345678 active 1234-5678-…
1234567890000002 OP0012345678 ready abcd-cafe-…
1234567890000003 instock cdef-beef-…
Group ID (Part) IMSI (Sort) Status …
1234-5678-… 1234567890000001 active …
abcd-cafe-… 1234567890000002 ready …
Subscribers Base Table
Group ID Index
OperatorID (Part) Group ID (Sort)
OP0012345678 1234-5678-…
OP0012345678 abcd-cafe-…
OP0012345679 cdef-beef-…
Group Table
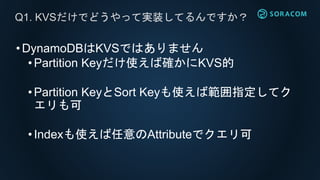
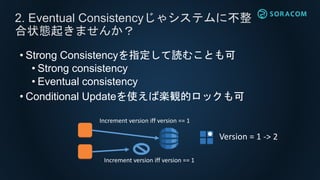
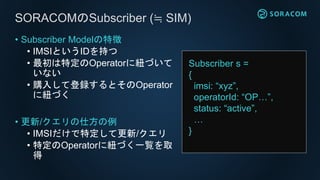
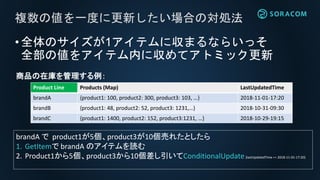
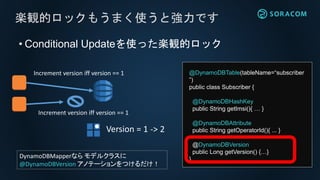
• Conditional Updateを使った楽観的ロック
楽観的ロックもうまく使うと強力です
Incrementversion iff version == 1
Version = 1 -> 2
Increment version iff version == 1
@DynamoDBTable(tableName=“subscriber
”)
public class Subscriber {
@DynamoDBHashKey
public String getImsi(){ … }
@DynamoDBAttribute
public String getOperatorId(){ ... }
@DynamoDBVersion
public Long getVersion() {…}
}DynamoDBMapperなら モデルクラスに
@DynamoDBVersion アノテーションをつけるだけ!
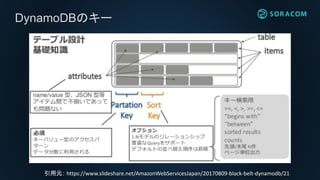
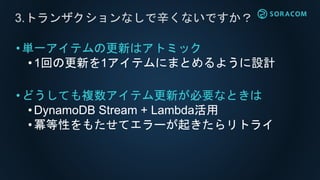
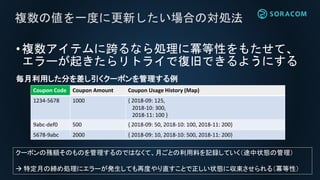
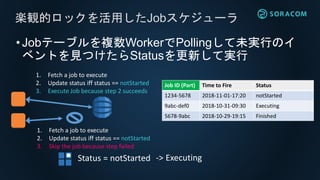
楽観的ロックを活用したJobスケジューラ
Job ID (Part)Time to Fire Status
1234-5678 2018-11-01-17:20 notStarted
9abc-def0 2018-10-31-09:30 Executing
5678-9abc 2018-10-29-19:15 Finished
1. Fetch a job to execute
2. Update status iff status == notStarted
3. Execute Job because step 2 succeeds
Status = notStarted -> Executing
1. Fetch a job to execute
2. Update status iff status == notStarted
3. Skip the job because step failed
•Jobテーブルを複数WorkerでPollingして未実行のイ
ベントを見つけたらStatusを更新して実行
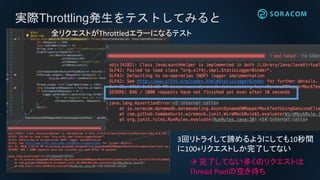
52.
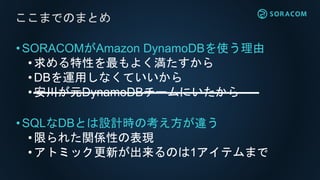
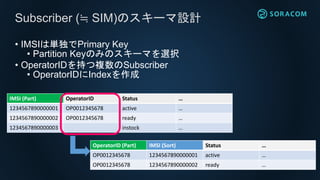
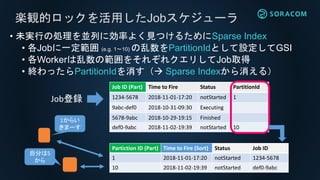
楽観的ロックを活用したJobスケジューラ
Job ID (Part)Time to Fire Status PartitionId
1234-5678 2018-11-01-17:20 notStarted 1
9abc-def0 2018-10-31-09:30 Executing
5678-9abc 2018-10-29-19:15 Finished
def0-9abc 2018-11-02-19:39 notStarted 10
• 未実行の処理を並列に効率よく見つけるためにSparse Index
• 各Jobに一定範囲 (e.g. 1〜10) の乱数をPartitionIdとして設定してGSI
• 各Workerは乱数の範囲をそれぞれクエリしてJob取得
• 終わったらPartitionIdを消す( Sparse Indexから消える)
Partiction ID (Part) Time to Fire (Sort) Status Job ID
1 2018-11-01-17:20 notStarted 1234-5678
10 2018-11-02-19:39 notStarted def0-9abc
Job登録
1からい
きまーす
自分は5
から














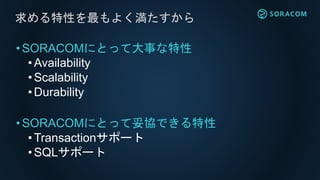


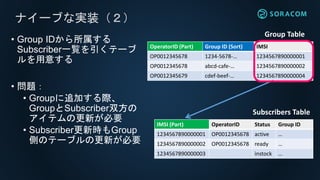
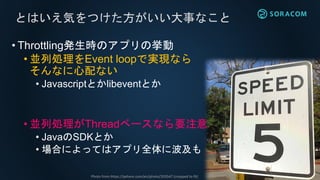
![• Groupの属性としてSubscriber IDのリ
ストを持つ
• 問題:
• アイテムサイズの上限で頭打ち
• Groupに追加する際、Groupと
Subscriber双方のアイテムの更新が
必要
• Groupに所属するSubscriberの情報
を取得するのにSubscriberの数分の
クエリが必要
ナイーブな実装(1)
Group g =
{
id: “dead-beaf-cafe”,
operatorId: “OP…”,
configuration: { … },
subscribers: [
“imsi1”, “imsi2”, …
]
}](https://image.slidesharecdn.com/20181101awsdevdaypublic-181102014806/85/AWS-Dev-Day-Tokyo-2018-Amazon-DynamoDB-Backed-40-320.jpg)







![[AKIBA.AWS] NLBとPrivateLinkの仕様に立ち向かう](https://cdn.slidesharecdn.com/ss_thumbnails/akibaaws8-180608005313-thumbnail.jpg?width=640&height=640&fit=bounds)























![[Aurora事例祭り]Amazon Aurora を使いこなすためのベストプラクティス](https://cdn.slidesharecdn.com/ss_thumbnails/amazonauroratips-170307140000-thumbnail.jpg?width=640&height=640&fit=bounds)

![[db tech showcase Tokyo 2015] A33:Amazon DynamoDB Deep Dive by アマゾン データ サービス ...](https://cdn.slidesharecdn.com/ss_thumbnails/dbts-tokyo-2015a33amazon-dynamodbamazondataservicejapan-150623010315-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)




![[AWSマイスターシリーズ] Amazon DynamoDB](https://cdn.slidesharecdn.com/ss_thumbnails/20131002aws-meister-regenerate-dynamodb-public-131004025730-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



![[よくわかるクラウドデータベース] CassandraからAmazon DynamoDBへの移行事例](https://cdn.slidesharecdn.com/ss_thumbnails/cassandraamazondynamodb-140216194358-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




























