Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
IRJET Journal
42 views
Autonomous Car using Arduino
https://www.irjet.net/archives/V9/i1/IRJET-V9I1294.pdf
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 3
2
/ 3
Most read
3
/ 3
Most read
More Related Content
PDF
Kiona – A Smart Society Automation Project
by
IRJET Journal
PDF
Wireless Arduino Control via Mobile: Eliminating the Need for a Dedicated Wir...
by
IRJET Journal
PDF
SPACE WATCH YOUR REAL-TIME SPACE INFORMATION HUB
by
IRJET Journal
PDF
DESIGN AND DEVELOPMENT OF BATTERY THERMAL MANAGEMENT SYSTEM USING PHASE CHANG...
by
IRJET Journal
PDF
Enhanced heart disease prediction using SKNDGR ensemble Machine Learning Model
by
IRJET Journal
PDF
Invest in Innovation: Empowering Ideas through Blockchain Based Crowdfunding
by
IRJET Journal
PDF
A Review on Influence of Fluid Viscous Damper on The Behaviour of Multi-store...
by
IRJET Journal
PDF
Utilizing Biomedical Waste for Sustainable Brick Manufacturing: A Novel Appro...
by
IRJET Journal
Kiona – A Smart Society Automation Project
by
IRJET Journal
Wireless Arduino Control via Mobile: Eliminating the Need for a Dedicated Wir...
by
IRJET Journal
SPACE WATCH YOUR REAL-TIME SPACE INFORMATION HUB
by
IRJET Journal
DESIGN AND DEVELOPMENT OF BATTERY THERMAL MANAGEMENT SYSTEM USING PHASE CHANG...
by
IRJET Journal
Enhanced heart disease prediction using SKNDGR ensemble Machine Learning Model
by
IRJET Journal
Invest in Innovation: Empowering Ideas through Blockchain Based Crowdfunding
by
IRJET Journal
A Review on Influence of Fluid Viscous Damper on The Behaviour of Multi-store...
by
IRJET Journal
Utilizing Biomedical Waste for Sustainable Brick Manufacturing: A Novel Appro...
by
IRJET Journal
More from IRJET Journal
PDF
Kiona – A Smart Society Automation Project
by
IRJET Journal
PDF
Auto-Charging E-Vehicle with its battery Management.
by
IRJET Journal
PDF
Auto-Charging E-Vehicle with its battery Management.
by
IRJET Journal
PDF
Explainable AI(XAI) using LIME and Disease Detection in Mango Leaf by Transfe...
by
IRJET Journal
PDF
Wireless Arduino Control via Mobile: Eliminating the Need for a Dedicated Wir...
by
IRJET Journal
PDF
BRAIN TUMOUR DETECTION AND CLASSIFICATION
by
IRJET Journal
PDF
Breast Cancer Detection using Computer Vision
by
IRJET Journal
PDF
A Novel System for Recommending Agricultural Crops Using Machine Learning App...
by
IRJET Journal
PDF
DESIGN AND DEVELOPMENT OF BATTERY THERMAL MANAGEMENT SYSTEM USING PHASE CHANG...
by
IRJET Journal
PDF
Advancements in CFD Analysis of Shell and Tube Heat Exchangers with Nanofluid...
by
IRJET Journal
PDF
The Project Manager as an ambassador of the contract. The case of NEC4 ECC co...
by
IRJET Journal
PDF
Analysis of high energy charge particle in the Heliosphere
by
IRJET Journal
PDF
Utilizing Biomedical Waste for Sustainable Brick Manufacturing: A Novel Appro...
by
IRJET Journal
PDF
FIR filter-based Sample Rate Convertors and its use in NR PRACH
by
IRJET Journal
PDF
AR Application: Homewise VisionMs. Vaishali Rane, Om Awadhoot, Bhargav Gajare...
by
IRJET Journal
PDF
SPACE WATCH YOUR REAL-TIME SPACE INFORMATION HUB
by
IRJET Journal
PDF
Invest in Innovation: Empowering Ideas through Blockchain Based Crowdfunding
by
IRJET Journal
PDF
Analysis of high energy charge particle in the Heliosphere
by
IRJET Journal
PDF
A Review on Influence of Fluid Viscous Damper on The Behaviour of Multi-store...
by
IRJET Journal
PDF
"Enhanced Heat Transfer Performance in Shell and Tube Heat Exchangers: A CFD ...
by
IRJET Journal
Kiona – A Smart Society Automation Project
by
IRJET Journal
Auto-Charging E-Vehicle with its battery Management.
by
IRJET Journal
Auto-Charging E-Vehicle with its battery Management.
by
IRJET Journal
Explainable AI(XAI) using LIME and Disease Detection in Mango Leaf by Transfe...
by
IRJET Journal
Wireless Arduino Control via Mobile: Eliminating the Need for a Dedicated Wir...
by
IRJET Journal
BRAIN TUMOUR DETECTION AND CLASSIFICATION
by
IRJET Journal
Breast Cancer Detection using Computer Vision
by
IRJET Journal
A Novel System for Recommending Agricultural Crops Using Machine Learning App...
by
IRJET Journal
DESIGN AND DEVELOPMENT OF BATTERY THERMAL MANAGEMENT SYSTEM USING PHASE CHANG...
by
IRJET Journal
Advancements in CFD Analysis of Shell and Tube Heat Exchangers with Nanofluid...
by
IRJET Journal
The Project Manager as an ambassador of the contract. The case of NEC4 ECC co...
by
IRJET Journal
Analysis of high energy charge particle in the Heliosphere
by
IRJET Journal
Utilizing Biomedical Waste for Sustainable Brick Manufacturing: A Novel Appro...
by
IRJET Journal
FIR filter-based Sample Rate Convertors and its use in NR PRACH
by
IRJET Journal
AR Application: Homewise VisionMs. Vaishali Rane, Om Awadhoot, Bhargav Gajare...
by
IRJET Journal
SPACE WATCH YOUR REAL-TIME SPACE INFORMATION HUB
by
IRJET Journal
Invest in Innovation: Empowering Ideas through Blockchain Based Crowdfunding
by
IRJET Journal
Analysis of high energy charge particle in the Heliosphere
by
IRJET Journal
A Review on Influence of Fluid Viscous Damper on The Behaviour of Multi-store...
by
IRJET Journal
"Enhanced Heat Transfer Performance in Shell and Tube Heat Exchangers: A CFD ...
by
IRJET Journal
Autonomous Car using Arduino
1.
International Research Journal
of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 1653 Autonomous Car using Arduino Shambhavi Lalsinge1, Yash Mali2, Akshit Mahale3, Mrunmayee Kulkarni4, Omkar Kurade5, Professor. Pramod Patil6 ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract - We propose a model of a self driving car which is analogous to an actual self driving car, but is a simpler and value effective version. This model will help students to understand the working of an actual autonomous car. This model can also help in solving some real world problems. Using the logic and algorithm used in this model , in a any other vehicle such as a wheel chair can make it autonomous and help the user to operate it without anyoneelse’shelp. Also, hardware architecture is described which may be tweaked in step with the need. Key Words: Arduino, self driving car, Autonomous, ultrasonic sensor, motor, batteries,objectdetection,obstacle detection. 1.INTRODUCTION Autonomous vehicles are generating significant attention and discussion, since recently every automobile company is working to develop their respective autonomous vehicle concept and many are getting successful in achieving some levels of autonomy and are planning to start production of autonomous vehicles in few years. Even though people are not yet sure and still have mixed feelings of excitement and insecurity regarding the autonomous concept but they will either accept it or reject it on the basis of the impacts of autonomous vehicles, such as safety, etc. Researchers and analysts fromvariousuniversitiesandcompaniesaround the world have already started considering theconsequencesof autonomous vehicles on carbon emission, number of cars per person, safety of the people sitting in car etc. and are providing their insights on driverless car concept. Self- driving cars will need to outperform human driving capabilities for securing a larger consumer market. Surely,it will have a huge impact on thetimelineoftransportationand it will completely change the way of people’s thinking towards future technologies. 2. LITERATURE SURVEY The development of the autopilot airplanes was a big step in human history towards any type of vehicle automation.This invention has set the pillars for the innovation of the self driven cars. From the year 1920, researchers have been working on solving the challenge to build driverless autonomous cars. During the year 1926, Lihirrican Wonder used radio antennas to and sent radio impulses which were further caught by the antennae. Theantennaeintroduces the signal to circuit breakers which operate small electric motors that direct every movement of the car. This was the first step in the innovation of autonomous cars. Currently, Tesla has successfully implementedtheconceptofdriverless cars. In the paper, “Self-driving car to demonstrate real time obstacles & object detection.” by Mayur Bhangale, Gaurav Dabhade, Akshay Khairnar, Mamta Bhagat, a model of an autonomous car has been proposed which uses an Arduino along with Rasberry pi for processing. Forobstacledetection they have used ultrasonic sensor and for path detectionthey have used camera which does real time image processing. In the paper “The key technology toward the self-driving car “ by Jianfeng Zhao, Bodong Liang and Qiuxia Chen, the paper analyzes the key technology of self-driving car and illuminates the state-of-art of the self-driving car. In the paper “Autonomous Vehicles: Levels, Technologies, Impacts and Concerns” by Mohsin Raza, the author has demonstrated the various technologies that can be implemented in self – driving cars. These technologies are stated according to levels of IOT.The author has also defined the various impacts of self driving car and concerns regarding this. In the paper “Self-Driving and Driver Relaxing Vehicle” by Qudsia Memon, Muzamil Ahmed, Shahzeb Ali,Azam Rafique Memon, Wajiha Shah. This paper states a model of self driving car which uses a GPS module along with a GSM module. This model analyses anothercarinfrontof itselfand analyses it’s movements. So it keeps following the another car with the help of ultrasonic sensor. 3. METHODOLOGY 3.1 Components and Design Arduino Uno: It is a type of microcontroller that works with ATmega328P. It is used for processing the data received from the sensors and give accurate commands to the actuators according to the input received. Servo Motor: It is a type of actuator that allows to control the angular position control precisely. It contains a motor that coupled with a sensor that helps for the proper position feedback. Motor Driver Circuit: An arduino pin is able to deliver only 40mA current but a DC motor requires more current so we use Motor Driver. It is like a current amplifier which drives the motor according to signals from the arduino.
2.
International Research Journal
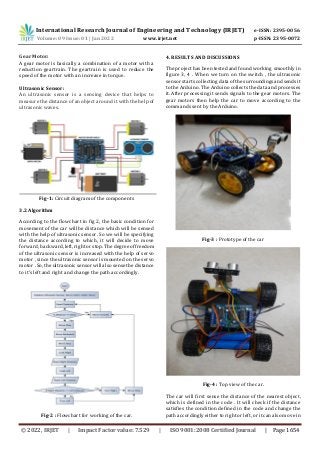
of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 1654 Gear Motor: A gear motor is basically a combination of a motor with a reduction geartrain. The geartrain is used to reduce the speed of the motor with an increase in torque. Ultrasonic Sensor: An ultrasonic sensor is a sensing device that helps to measure the distance of an object around it with the help of ultrasonic waves. Fig-1: Circuit diagram of the components 3.2 Algorithm According to the flowchart in fig 2, the basic condition for movement of the car will be distance which will be sensed with the help of ultrasonic sensor. So we will be specifying the distance according to which, it will decide to move forward, backward, left, right or stop. The degree offreedom of the ultrasonic sensor is increased with the help of servo motor , since the ultrasonic sensor is mounted on the servo motor . So, the ultrasonic sensor will also sense the distance to it’s left and right and change the path accordingly. Fig-2 : Flowchart for working of the car. 4. RESULTS AND DISCUSSIONS The project has been tested and found working smoothly in figure 3, 4 . When we turn on the switch , the ultrasonic sensor starts collecting data of thesurroundingsandsendsit to the Arduino. The Arduino collects the data and processes it. After processing it sends signals to the gear motors. The gear motors then help the car to move according to the commands sent by the Arduino. Fig-3 : Prototype of the car Fig-4 : Top view of the car. The car will first sense the distance of the nearest object, which is defined in the code . It will check if the distance satisfies the condition defined in the code and change the path accordingly either to right or left, or it can also move in
3.
International Research Journal
of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 1655 the backward direction and sense for the objects again. 5. CONCLUSIONS According to all the results discussed in this paper, we conclude that the car uses ultrasonic sensor to calculate the distance and detect the obstacles around it and is also capable of taking it’s own decisions regarding changing the directions to make a movement. The vehicle routes itself with the help of input from the ultrasonic sensor. The input from the ultrasonic sensor is passed to arduino where it is processed and then thecommandsbythearduinoarepassed to the motors. In this way the car operates and takes decisions to move in any of the directions. REFERENCES [1] Mayur Bhangale, Gaurav Dhabade, Akshay Khairnar, Mamta Bhagat “Self Drivingcartodemonstratereal time obstacles and object detection” International Research Journal of EngineeringandTechnologyVolume03Issue: 11 Nov-2016. [2] Mohsin Raza “Autonomous Vehicles: Levels, Technologies, Impacts and Concerns” International Journal of Applied Engineering Research Volume 13, Number 16 (2018). [3] Jianfeng Zhao, Bodong Liang, Quixia Chen “The key technology towards self-driving car” IJIUS 2017. [4] Shahzeb Ali, Azam Rafique “Self-Driving and Driver Relaxing Vehicle” ICRAI November-2016 [5] Shubh Srivastava, Rajanish Singh “Voice Controlled Robot Car Using Arduino” International Research Journal of Engineering and Technology Volume: 07 Issue: 05 May 2020
Download

![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056
Volume: 09 Issue: 01 | Jan 2022 www.irjet.net p-ISSN: 2395-0072
© 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 1655
the backward direction and sense for the objects again.
5. CONCLUSIONS
According to all the results discussed in this paper, we
conclude that the car uses ultrasonic sensor to calculate the
distance and detect the obstacles around it and is also
capable of taking it’s own decisions regarding changing the
directions to make a movement. The vehicle routes itself
with the help of input from the ultrasonic sensor. The input
from the ultrasonic sensor is passed to arduino where it is
processed and then thecommandsbythearduinoarepassed
to the motors. In this way the car operates and takes
decisions to move in any of the directions.
REFERENCES
[1] Mayur Bhangale, Gaurav Dhabade, Akshay Khairnar,
Mamta Bhagat “Self Drivingcartodemonstratereal time
obstacles and object detection” International Research
Journal of EngineeringandTechnologyVolume03Issue:
11 Nov-2016.
[2] Mohsin Raza “Autonomous Vehicles: Levels,
Technologies, Impacts and Concerns” International
Journal of Applied Engineering Research Volume 13,
Number 16 (2018).
[3] Jianfeng Zhao, Bodong Liang, Quixia Chen “The key
technology towards self-driving car” IJIUS 2017.
[4] Shahzeb Ali, Azam Rafique “Self-Driving and Driver
Relaxing Vehicle” ICRAI November-2016
[5] Shubh Srivastava, Rajanish Singh “Voice Controlled
Robot Car Using Arduino” International Research
Journal of Engineering and Technology Volume: 07
Issue: 05 May 2020](https://image.slidesharecdn.com/irjet-v9i1294-220912105548-585f0841/85/Autonomous-Car-using-Arduino-3-320.jpg)




























