Download to read offline





























































































![96
Глава 6 Параметры
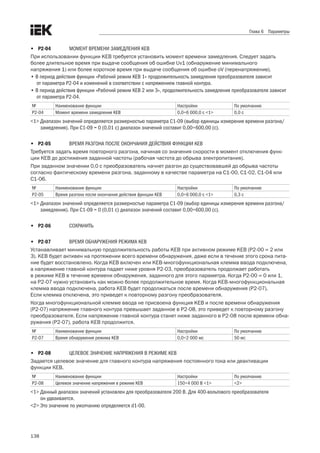
d2: Характеристики электродвигателя
Характеристики d2 несут в себе важную информацию об электродвигателе, необходимую для его опти-
мальной регулировки. При методах регулирования с открытым контуром параметры электродвигателя
задаются автоматически функцией «Автонастройка». Если корректная настройка через функцию «Автона-
стройка» невозможна, параметры настраиваются в ручном режиме.
• Характеристики электродвигателя 1
• d2-00 Номинальный ток электродвигателя
Настройка тока электродвигателя в соответствии с данными заводской таблички. Это значение обеспечи-
вает защиту элетродвигателя по крутящему моменту и может быть настроено через функцию
«Автонастройка».
№ Наименование функции Настройки По умолчанию
d2-00 Номинальный ток электродвигателя 10÷200 % от номинального
тока преобразователя
Определяется o2-03, A1-06
ПРИМЕЧАНИЯ:
1. Если максимальная мощность электродвигателя, при которой может работать преобразователь, менее чем 11 кВт,
то он будет отображаться в единицах 0,1 A. Максимальная мощность электродвигателя, при которой может работать
преобразователь, определяется A1-06 (ND/HD-режим).
2. Если параметр d2-00 (номинальный ток электродвигателя) ниже, чем значение d2-02 (ток холостого хода электро-
двигателя), будет выдано сообщение об ошибке OPE02 (критическая ошибка уставки пороговых значений параме-
тра). Важно внимательно задавать значение параметра d2-02.
• d2-01 Номинальное скольжение электродвигателя
Требуется установить номинальное скольжение электродвигателя. Эта величина определяет компенса-
цию скольжения и будет автоматически устанавливаться в процессе автонастройки.
№ Наименование функции Настройки По умолчанию
d2-01 Номинальное скольжение электродвигателя 0,00÷20,00 Гц Определяется o2-03, A1-06
Если автонастройка по каким-то причинам произведена быть не может, следует использовать данные
заводской таблички электродвигателя для расчета номинального скольжения ротора электродвигателя
по следующей формуле:
d2-01 = f – (n × p) / 120,
где f — номинальная частота (Гц), n — номинальная скорость двигателя (мин-1
), p — число полюсов элект-
родвигателя.
• d2-02 Ток электродвигателя без нагрузки
Следует установить параметр тока электродвигателя без нагрузки, когда он работает с напряжением
без нагрузки и на номинальной частоте. Затем параметр будет автоматически задаваться в «Автона-
стройке». Данный параметр можно также настроить согласно протоколу испытания электродвигателя
без нагрузки либо документации на электродвигатель, запросить которую можно у производителя элект-
родвигателя.
№ Наименование функции Настройки По умолчанию
d2-02 Ток холостого хода двигателя 0,0÷[d2-00] А
(исключая d2-00)
Определяется o2-03, A1-06
ПРИМЕЧАНИЕ: если максимальная мощность электродвигателя, при которой может работать преобразователь,
менее чем 11 кВт, то он будет отображаться в единицах 0,1 A. Максимальная мощность электро-
двигателя, при которой может работать преобразователь, определяется A1-06 (ND/HD режим).](https://image.slidesharecdn.com/4-170123004448/85/4-3-2-Control-H800-97-320.jpg)

![98
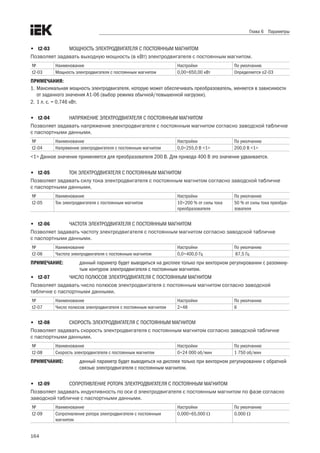
Глава 6 Параметры
• Настройка параметров электродвигателя вручную
Следует воспользоваться данными по испытанию электродвигателя и соблюдать приведенные ниже ука-
зания.
• Настройка номинального тока электродвигателя
Ввести указанную на заводской табличке величину номинального тока электродвигателя в параметр
d2-00.
• Настройка номинального скольжения электродвигателя
Использовать указанную на заводской табличке номинальную скорость электродвигателя для расчета
номинального скольжения электродвигателя и ввести полученный показатель в параметр d2-01.
Номинальное скольжение двигателя =
номинальная частота двигателя [Гц] – номинальная скорость (мин-1
) × число полюсов двигателя / 120
• Настройка тока электродвигателя без нагрузки
Настройка тока без нагрузки производится во время работы электродвигателя под напряжением
без нагрузки и с номинальной частотой. Эти данные не указаны на заводской табличке, поэтому
для их получения надо связаться с производителем электродвигателя либо взять их из сопроводительной
документации на электродвигатель.
• Настройка числа полюсов электродвигателя
Параметр d2-03 активен только в опциях управления V/F с замкнутым контуром и векторного управления
с замкнутым контуром. Вводится число полюсов электродвигателя, указанное на заводской табличке
электродвигателя.
• Настройка междуфазного сопротивления электродвигателя
Параметр d2-04 будет автоматически устанавливаться во время автонастройки. Если по каким-то причи-
нам автонастройка не может быть произведена корректно, надо запросить у производителя электродви-
гателя отчет по испытанию или документацию на электродвигатель. Указанное междуфазное
сопротивление используется для расчета этого параметра электродвигателя по следующей формуле:
• изоляция типа E: указанное сопротивление (Ω) при 75 °C × 0,92;
• изоляция типа B: указанное сопротивление (Ω) при 75 °C × 0,92;
• изоляция типа F: указанное сопротивление (Ω) при 115 °C × 0,87.
• Параметры индуктивности рассеяния электродвигателя
В процессе автонастройки параметр d2-05 будет настроен автоматически.
• Настройка сопротивления в цепи электродвигателя и взаимной индуктивности
Параметры d2-06 и d2-07 будут автоматически заданы функцией «Автонастройка вращения».
• d2-11 Номинальный ток электродвигателя 2
Настройте номинальный ток электродвигателя 2 в соответствии с данными заводской таблички. Это зна-
чение обеспечивает защиту электродвигателя по крутящему моменту и может быть настроено через функ-
цию «Автонастройка».
№ Наименование функции Настройки По умолчанию
d2-11 Номинальный ток электродвигателя 10÷200 % от номинального
тока преобразователя
Определяется o2-03, A1-06
ПРИМЕЧАНИЯ:
1. Если максимальная мощность электродвигателя, при которой может работать преобразователь, менее чем 11 кВт,
то он будет отображаться в единицах 0,1 A. Максимальная мощность электродвигателя, при которой может работать
преобразователь, определяется A1-06 (ND/HD-режим).
2. Если параметр d2-00 (номинальный ток электродвигателя) ниже, чем значение d2-02 (ток холостого хода электро-
двигателя), будет выдано сообщение об ошибке OPE02 (критическая ошибка уставки пороговых значений параме-
тра). Важно внимательно задавать значение параметра d2-02.](https://image.slidesharecdn.com/4-170123004448/85/4-3-2-Control-H800-99-320.jpg)


































































![168
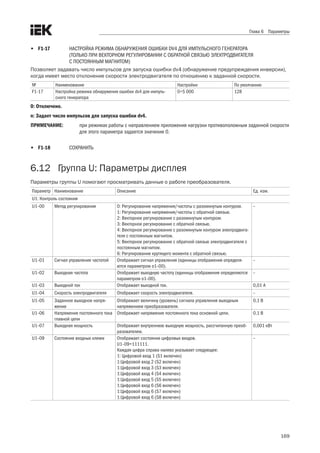
Глава 6 Параметры
• F1-11/F1-12/F1-13 Варианты ответных действий на отклонение скорости (ошибка dEv) /
уровень обнаружения / время задержки обнаружения отклонения скорости
№ Наименование Настройки По умолчанию
F1-11 Варианты ответных действий на отклонение скорости
(ошибка dEv)
0: Линейный сброс для останова.
1: Движение по инерции до останова.
2: Только предупредительный ава-
рийный сигнал
2
F1-12 Уровень обнаружения отклонения скорости (ошибка dEv) 0÷50 % 10 %
F1-13 Время задержки обнаружения отклонения скорости (ошибка
dEv)
0,0÷10,0 с 0,5 с
Позволяет задавать уровень обнаружения отклонения скорости (ошибка dEv) в процентах от максималь-
ной выходной частоты (d1-02). Запускаемая ошибка dEv останавливает преобразователь с учетом задан-
ного значения для F1-11, если разница между обратной связью по скорости и сигналом управления
частотой оказывается больше уровня, заданного для F1-12, в течение периода времени, превышающего
время задержки, заданное для F1-13.
См. рисунок 6.86 (схема обнаружения ошибок обратной связи с импульсным генератором).
• F1-14/F1-15 Число зубьев шестерни 1/2 импульсного генератора (только при регулировании
с обратной связью)
Позволяет задать число зубьев шестерни (отношение) на стороне механического оборудования между
валом электродвигателя и импульсным генератором (импульсным кодирующим устройством). Число
зубьев шестерни на стороне электродвигателя задается в F1-14, а на стороне механического оборудова-
ния — в F1-15. Преобразователь использует для расчета скорости электродвигателя следующую формулу:
Частота входных импульсов от импульсного генератора × 60
F1-14 зубья шестерни импульсного генераторана стороне нагрузки
F1-15 зубья шестерни импульсного генератора на стороне двигателя
F1-00
Скорость двигателя [мин-1
] = ×
№ Наименование Настройки По умолчанию
F1-14 Число зубьев шестерни импульсного генератора 1 0÷1 000 0
F1-15 Число зубьев шестерни импульсного генератора 2 0÷1 000 0
ПРИМЕЧАНИЕ: когда для F1-14 или F1-15 задается 0, отношение будет составлять 1.
• F1-16 Настройка режима обнаружения ошибки dv3 для импульсного генератора
(только при векторном регулировании с обратной связью электродвигателя
с постоянным магнитом)
Позволяет задавать число действий по обнаружению и запуску ошибки dv3 (обнаружение инверсии).
Наличие ошибки dv3 будет выявляться, когда заданный крутящий момент и заданная скорость являются
разнонаправленными, в то время как разница между фактической скоростью двигателя и заданной ско-
ростью составляет больше 30 %.
№ Наименование Настройки По умолчанию
F1-16 Настройка режима обнаружения ошибки dv3
для импульсного генератора
0÷10 10
0: Отключено.
n: Задает число действий по обнаружению и запуску ошибки dv3.](https://image.slidesharecdn.com/4-170123004448/85/4-3-2-Control-H800-169-320.jpg)










































Документ представляет собой руководство по эксплуатации векторного преобразователя частоты общепромышленного применения Control H800. В нем содержится информация о мерах безопасности, установке, подключении и технических характеристиках устройства. Также приводятся указания по выбору и обслуживанию преобразователя для обеспечения его безопасной и эффективной работы.



































































