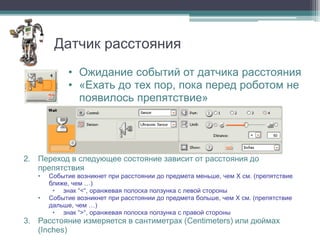
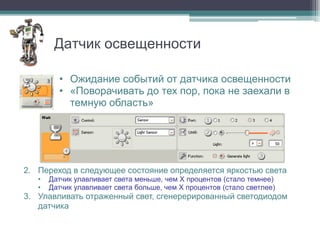
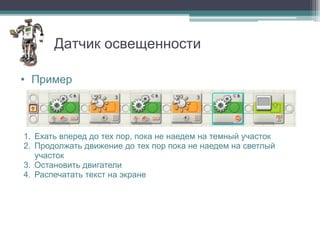
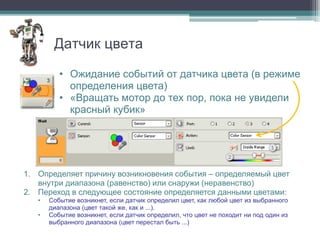
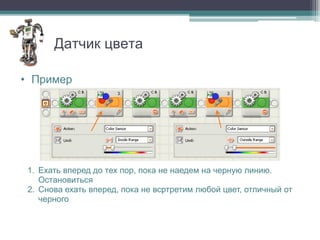
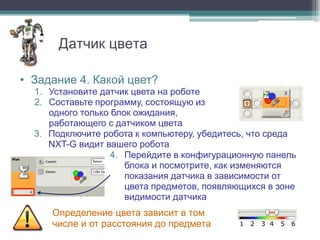


Документ описывает программирование LEGO-роботов с использованием различных датчиков, включая датчики расстояния, освещенности и цвета. Включает примеры задач и алгоритмов, таких как определение препятствий, следование за цветами и движение в зависимости от освещенности. Также рассматриваются основные принципы взаимодействия робота с окружающей средой через выбранные датчики.





































