More Related Content

PPTX
美国南北独立战争时间线111111111111111111111111.pptx 
PPTX
美国历史概述11111111111111111111111111111.pptx 
PPTX
颅内动脉瘤破裂术后护理111111111111111111111111.pptx 
PPTX
风景PPT模板与旅游数据分析应用1111111111111111111.pptx 
PPTX
儿童生长发育与肥胖的科学防治111111111111111111111.pptx 
PPT
防御性驾驶培训1111111111111111111111111111111.ppt 
PPT
德语入门11111111111111111111111111111111.ppt 
PPT
防溺水安全教育课件(3)11111111111111111111111111.ppt Featured

PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing 
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process 
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis... 
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR... 
PDF
2024 State of Marketing Report – by Hubspot 
PDF
Everything You Need To Know About ChatGPT 
PDF
Product Design Trends in 2024 | Teenage Engineerings 
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health 
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf 
PDF

PDF
PEPSICO Presentation to CAGNY Conference Feb 2024 
PDF
Content Methodology: A Best Practices Report (Webinar) 
PPTX
How to Prepare For a Successful Job Search for 2024 
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights 
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024 
PDF
5 Public speaking tips from TED - Visualized summary 
PDF
ChatGPT and the Future of Work - Clark Boyd 
PDF
Getting into the tech field. what next 
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent 
PDF
How to have difficult conversations 第十一章汽车与自动驾驶系统111111111111111111111111111.pptx
- 1.
- 2.
- 3.
- 4.
- 5.
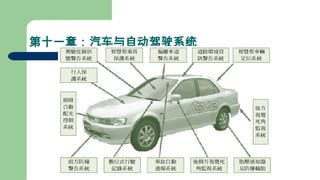
第十一章:汽车与自动驾驶系统
11.2 世界智能车辆的研究与发展
1. 它的研究始于20 世纪 50 年代初美国 Barrett Electronics 公司开发出世
界上第一台自动引导车辆系统( Automated Guided Vehicle
System , AGVS )
2 . 1974 年,瑞典的 Volvo Kalmar 轿车装配工厂与 Schiinder - Digitron
公司合作,研制出一种可装载轿车车体的 AGVS ,并由多台该种 AGVS 组
成了汽车装配线,从而取消了传统应用的拖车及叉车等运输工具。由于
Kalmar 工厂采用 AGVS 获得了明显的经济效益,许多西欧国家纷纷效仿
Volvo 公司,并逐步使 AGVS 在装配作业中成为一种流行的运输手段。
3. 20 世纪 80 年代,伴随着与机器人技术密切相关的计算机。电子、通信
技术的飞速发展,国外掀起了智能机器人研究热潮,其中各种具有广阔应
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.