1. РАЗДЕЛ 7. НЕЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ.
Нелинейные элементы. Их характеристики и параметры.
Если электрическая цепь содержит хотя бы один нелинейный элемент, цепь
называется нелинейной. У таких цепей отклик и воздействие связаны нелиней-
ными зависимостями.
Нелинейные элементы, так же, как и линейные, могут быть резистивными и
реактивными. Цепь, содержащая нелинейный резистивный элемент, называется
резистивной и ее можно считать нелинейной безынерционной цепью.
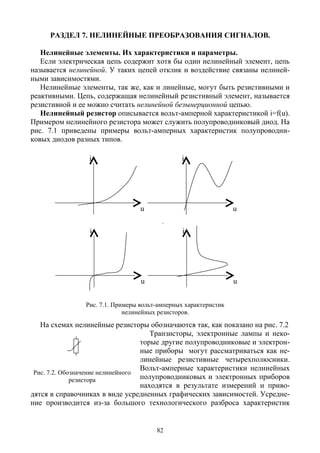
Нелинейный резистор описывается вольт-амперной характеристикой i=f(u).
Примером нелинейного резистора может служить полупроводниковый диод. На
рис. 7.1 приведены примеры вольт-амперных характеристик полупроводни-
ковых диодов разных типов.
i i
u u
i i
u u
Рис. 7.1. Примеры вольт-амперных характеристик
нелинейных резисторов.
На схемах нелинейные резисторы обозначаются так, как показано на рис. 7.2
Транзисторы, электронные лампы и неко-
торые другие полупроводниковые и электрон-
ные приборы могут рассматриваться как не-
линейные резистивные четырехполюсники.
Вольт-амперные характеристики нелинейных
Рис. 7.2. Обозначение нелинейного
резистора полупроводниковых и электронных приборов
находятся в результате измерений и приво-
дятся в справочниках в виде усредненных графических зависимостей. Усредне-
ние производится из-за большого технологического разброса характеристик
82
2. различных образцов прибора одного и того же типа. Эти характеристики яв-
ляются статическими, т.е., характеристиками режима постоянного тока.
Статическое сопротивление
U
R ст = 0 (7.1)
I0
нелинейного резистора не является постоянным, а зависит от того, в какой точ-
ке характеристики оно определяется, т.е. от величины приложенного к резисто-
ру напряжения U0 (I0 – ток, протекающий при этом напряжении через резистор).
Это сопротивление постоянному току и определяется оно тангенсом угла на-
клона прямой, проходящей через начало координат и рабочую точку.
Дифференциальное сопротивление
∆u
Rд = (7.2)
∆i
определяется отношением приращения напряжения Δu к приращению тока Δi
при небольшом смещении рабочей точки на вольт-амперной характеристике
под воздействием переменного напряжения малой амплитуды. Это сопротивле-
ние представляет собой сопротивление нелинейного элемента переменному
току малой амплитуды. Обычно устремляют Δu и Δi к 0 и определяют диффе-
ренциальное сопротивление в виде
du
Rд = . (7.3)
di
Это сопротивление определяется тангенсом угла наклона касательной к
вольт-амперной характеристике в рабочей точке.
Кроме дифференциального сопротивления часто используется понятие диф-
ференциальной крутизны
1 di
Sд = G д = = . (7.4)
R д du
Нелинейные емкостные элементы – это модели конденсаторов, диэлектри-
ческая проницаемость которых зависит от напряженности электрического поля
в диэлектрике. Они описываются нелинейными вольт-кулонными характери-
стиками, т.е. зависимостями заряда q от приложенного напряжения u (напри-
мер, рис. 7.3).
Нелинейная емкость характеризуется
q статической емкостью
q
C ст = (7.5)
uс
и дифференциальной емкостью
dq
u Cд = , (7.6)
du c
Рис.7.3. Вольт-кулонная которые зависят от приложенного напряже-
характеристика нелинейного ния.
емкостного элемента
83
3. Нелинейные индуктивные элементы. Нелинейным индуктивным элемен-
том является, например, катушка с сердечником из ферромагнитного материа-
ла. Типичная ампер-веберная характеристика индуктивного элемента имеет
вид, представленный на рисунке 7.4. Часто эти характеристики бывают неодно-
значными.
ψ Нелинейный индуктивный элемент ха-
рактеризуется статической индуктивно-
стью
i Ψ
L ст =
i
(7.7)
Рис. 7.4. Типичная ампер-веберная и дифференциальной индуктивностью
характеристика нелинейной dΨ .
индуктвности. Lд = (7.8)
di
Аппроксимация характеристик нелинейных элементов.
Теоретический анализ позволяет определить лишь общий вид вольт-ампер-
ной характеристики нелинейного элемента, и практическая ценность таких ха-
рактеристик для исследования поведения реальных нелинейных элементов в ра-
диотехнических схемах невелика. Практически полезные ВАХ,
как правило, получают экспериментально.
Однако эксперимент дает, по существу, табличное представление характе-
ристики, в то время как для анализа и расчетов необходимо аналитическое (в
виде формулы) представление ВАХ.
Поэтому производится замена таблично заданной характеристики аналити-
ческими функциями, приближенно отражающими поведение реальной ВАХ не-
линейного двухполюсника в ограниченном диапазоне изменения аргумента. Та-
кая замена называется аппроксимацией. К аппроксимирующей функции предъ-
являются противоречивые требования: обеспечивая хорошее качество прибли-
жения, она должна быть относительно простой и удобной для дальнейшего ис-
пользования. В частности, при выборе аппроксимации целесообразно учиты-
вать вид сигнала, который подвергается нелинейному преобразованию, а также
цель преобразования.
В настоящее время используются в основном две аппроксимирующие функ-
ции: степенной полином и кусочно-линейная функция.
Аппроксимация степенным полиномом. Пусть i=f(u) (рис. 7.5) является
графически заданной (экспериментально
i снятой) ВАХ. Будем искать представление
i3 этой характеристики в виде ряда Маклоре-
на
i2 i = f(u) = a0+a1u+a2u2+a3u3+a4u4+… (7.9)
Ограничиваясь n членами ряда
i1 i = f(u) = a0+a1u+a2u2+…+an-1un-1
0 u1 u u3 u
2
Рис. 7.5. ВАХ нелинейного элемента. 84
4. и, используя график рис.7.5, запишем систему уравнений:
i1 = f(u1) = a0+a1u1+a2u12+a3u13+…+an-1u1n-1,
i2 = f(u2) = a0+a1u2+a2u22+a3u23+…+an-1u2n-1,
i3 = f(u3) = a0+a1u3+a2u32+a3u33+…+an-1u3n-1,
…
In = f(un) = a0+a1un+a2un2+a3un3+…+an-1unn-1.
Решая эту систему алгебраических уравнений относительно неизвестных a0,
a1, a2,…., an-1, получим ВАХ нелинейного элемента, в данном случае диода, ап-
проксимированную полиномом n-й степени на участке u ∈ [ u 1 , u n ] .
В некоторых случаях удобнее оказывается представление в виде ряда Тейло-
ра
i = f(u) = a0+a1(u-U0)+a2(u-U0)2+a3(u-U0)3+a4(u-U0)4+… (7.10)
где U0 – рабочая точка ВАХ. В данном случае, очевидно, U0=0.
Иногда полиномом удобно аппроксимировать ВАХ, заданную не таблицей, а
некоторой аналитической функцией. В таком случае коэффициенты an вычисля-
ются по известным формулам:
1 d n f (u )
an = u =U0
n! du n
и, следовательно, зависят от выбора U0.
Как правило, аппроксимация ВАХ полиномом осуществима; поэтому теоре-
тически анализ нелинейных преобразований в радиотехнике часто ведут, непо-
средственно используя общее представление (7.9) или (7.10).
Необходимо отметить, что первую производную ВАХ называют дифферен-
циальной крутизной характеристики i=f(u). Для представления (7.9):
di
Sд = = a 1 + 2a 2 u + 3a 3 u 2 + ... ,
du
а для представления (7.10):
di
Sд = = a 1 + 2a 2 (u − U 0 ) + 3a 3 ( u − U 0 ) 2 + ...
du
Параметр S = Sд = a1 называется крутизной ВАХ в рабочей точке.
Кусочно-линейная аппроксимация. Если u изменяется в достаточно
больших пределах, ВАХ нелинейного элемента аппроксимируют двумя или бо-
лее отрезками прямых. Пример наиболее часто встречающегося варианта ку-
сочно-линейной аппроксимации ВАХ показан на рис. 7.6.
Аппроксимирующее выражение в данном случае записывается следующим
образом:
S(u − U1 ), u ≥ U1
i= (7.11)
0, u < U1
Здесь: S – крутизна линейного участка характеристики, U1 – координата “на-
чала” линейно возрастающего участка ВАХ (напряжение отсечки).
85
5. i
i
Im
U0 U1 0 u 0 2π ωt
θ
E θ 2θ
2π
ωt
Рис. 7.6. Кусочно-линейная аппроксимация.
Такая аппроксимация ВАХ используется, например, при анализе нелинейно-
го резонансного усилителя, умножителя частоты, детектирования ит.д.
Воздействие гармонического сигнала на безынерционный нелинейный
элемент.
На вход нелинейного безынерционного элемента воздействует гармониче-
ское колебание со смещением:
u(t) = U0+Ecos(ω1t+φ1). (7.12)
Рассмотрим результат воздействия этого сигнала на нелинейный двухполюс-
ник, ВАХ которого аппроксимирована, рассмотренными выше выражениями.
Полиномиальная аппроксимация. В качестве ВАХ возьмем полином
(7.10). Смещение U0 совпадает с координатой положения рабочей точки ВАХ.
Ток в цепи двухполюсника
i(t) = a0+a1Ecos(ω1t+φ1)+a2E2cos2(ω1t+φ1)+a3cos3((ω1t+φ1)+…
после элементарных преобразований с учетом известных формул “кратных
дуг”:
1
cos 2 α = (1 + cos 2α) ,
2
1
cos 3 α = (3 cos α + cos 3α) ,
4
1
cos 4 α = (3 + 4 cos 2α + cos 4α) ,
8
1
cos 5 α = (10 cos α + 5 cos 3α + cos 5α)
16
86
6. может быть представлен в виде:
1 3 3 5
i( t ) = a 0 + a 2 E 2 + a 4 E 4 + ... + a 1E + a 3 E 3 + a 5 E 5 + ... cos(ω1 t + ϕ1 ) +
2 8 4 8
1 1 1 5
+ a 2 E 2 + a 4 + ... cos 2(ω1 t + ϕ1 ) + a 3 E 3 + a 5 E 5 + ... cos 3(ω1 t + ϕ1 ) + ... =
2 8 4 16
= I 0 + I1 cos(ω1 t + ϕ1 ) + I 2 cos 2(ω1 t + ϕ1 ) + I 3 cos 3(ω1 t + ϕ1 ) + ... (7.13)
Явные выражения для постоянной составляющей тока I ′ и амплитуд гармо-
0
ник I1, I2, I3, следует непосредственно из соотношения (7.13).
Можно сделать следующие выводы:
1) амплитуды гармоник с четными номерами и постоянная составляющая
в (7.13) определяются только четными коэффициентами ряда (7.10);
2) амплитуды гармоник с нечетными номерами определяются только не-
четными коэффициентами ряда (7.10).
3) максимальный номер входящей в представление (7.13) гармоники (ко-
личество гармоник) определяется степенью аппроксимирующего ВАХ
полинома;
4) полная начальная фаза n-ой гармоники равна nφ1.
Кусочно-линейная аппроксимация. Метод угла отсечки. Для анализа
гармонического состава тока в цепи нелинейного двухполюсника с ВАХ, ап-
проксимированной выражением (7.11), рассмотрим рис. 7.6, где изображено ти-
пичное взаимное расположение ВАХ и сигнала (7.12). Начальную фазу, без по-
тери общности, примем здесь равной нулю: φ1=0.Ток в цепи появляется только
при u≥U1 и является последовательностью импульсов:
U − U0
S( U 0 + E cos ω1 t − U1 ) = SE (cos ω1 t − 1 ), ω1 t − 2kπ ≤ θ
i( t ) = E (7.14)
0
ω1 t − 2kπ > θ
Введенный в это выражение параметр θ называется углом отсечки. Физиче-
ский смысл угла отсечки иллюстрирует рис. 7.6 – очевидно, что по координате
ω1t (линейная текущая фаза) косинусоидальный импульс тока имеет длитель-
ность 2θ. При ω1t = 2kπ±θ ток в цепи равен нулю; из уравнения
U1 − U 0
SE (cos θ − ) = 0 следуют часто используемые
E соотношения
U − U0
cos θ = 1 , (7.15)
E
i( t ) = SE (cos ω1 t − cos θ), ω1 t ∈ [ 2kπ − θ, 2kπ + θ] . (7.16)
Максимального значения Im импульс тока достигает при ω1t=2kπ, поэтому
Im
I m = SE (1 − cos θ), SE = (7.17)
1 − cos θ
87
7. Используя полученные соотношения, будем искать коэффициенты разложе-
ния периодической (с периодом T=2π/ω1) функции (7.16) в ряд Фурье
a ∞
i( t ) = 0 + ∑ A n cos(nω1 t − ψ n ). (7.18)
2 n =1
Амплитуды гармонических составляющих
An = a 2 + b2 ,
n n (7.19)
но, так как функция (7.16) четная, коэффициенты bn=0 и An=an.
Коэффициенты an вычисляются по формуле
2 T/2 1 θ
an = ∫ i( t ) cos nω1 tdt = ∫ i( t ) cos nω1 td (ω1 t ). (7.20)
T −T / 2 π −θ
Этот интеграл преобразуется в следующий:
2I m θ
an = ∫ ( cos ω1 t − cos θ) cos nω1 td (ω1 t ) (7.21)
π(1 − cos θ) −θ
Интегрирование дает формулу для амплитуды n-ой гармоники:
2(sin nθ cos θ − n cos nθ sin θ
In = Im (7.22)
nπ( n 2 − 1)(1 − cos θ)
Явные выражения для амплитуд некоторых гармоник:
a sin θ − θ cos θ sin θ − θ cos θ
I′ = 0 = I m
0 = SE (7.23)
2 π(1 − cos θ) π
θ − sin θ cos θ θ − sin θ cos θ
I1 = A1 = I m = SE (7.24)
π(1 − cos θ) π
2 sin 3 θ 2
I2 = A2 = Im = SE sin 3 θ (7.25)
3π(1 − cos θ) 3π
Часто используются нормированные к Im значения In, или коэффициенты
Берга
I (θ)
αn = n , I n = α n (θ) I m , (7.26)
Im
а также функции Берга
I
γ n = n , I n = γ n SE . (7.27)
SE
Коэффициенты и функции Берга связаны друг с другом следующим об-
разом:
γ n (θ) = (1 − cos θ)α n (θ) . (7.27)
88
8. Для ряда значений n коэффициенты и функции Берга табулированы. Графи-
ки αn(θ) для n = 0, 1, 2, 3 и 4 приведены на рис.7.7.
αn
α1
α0
0.4
α2
α4 α3
0
θ°
0 40 120 180
Рис. 7.7. Графики коэффициентов Берга.
Вид графиков указывает на возможность оптимизации процедуры нелиней-
ного преобразования, так как при заданной ВАХ (фиксированном U1) угол от-
сечки θ в соответствии с формулой (7.7) регулируется выбором амплитуды E и
величины смещения U0.
Из формул, определяющих амплитуды гармоник тока, и из рис.7.7 следует,
что амплитуды могут принимать и отрицательные значения при некоторых зна-
чениях θ, что противоречит смыслу понятия “амплитуда”. В таких случаях ам-
плитудой следует считать модуль I n , а отрицательный знак относить к появле-
нию у n-ой гармоники дополнительной начальной фазы ±π.
Бигармоническое воздействие на безынерционный нелинейный эле-
мент.
Пусть на нелинейный двухполюсник с ВАХ, аппроксимированной функцией
i = f (u ) = a 1u + a 2 u 2 (7.28)
подано напряжение
u ( t ) = U 0 + E1 cos(ω1 t + ϕ1 ) + E 2 cos(ω 2 t + ϕ 2 ) . (7.29)
После подстановки (7.29) в (7.28) и преобразований, получим для тока в
цепи
2 1
i( t ) = a1U 0 + a 2 U 0 + a 2 (E1 + E 2 ) + ( a1 + 2a 2 U 0 ) E1 cos(ω1t + ϕ1 ) +
2
2
2
89
9. ( a 1 + 2a 2 U 0 ) E 2 cos(ω 2 t + ϕ 2 ) + 1 a 2 E1 cos 2(ω1t + ϕ1 ) + 1 a 2 E 2 cos(2ω 2 t + ϕ 2 ) +
2
2
2 2
a 2 E1E 2 cos[(ω1 + ω 2 ) t + ϕ1 + ϕ 2 ] + a 2 E1E 2 cos[(ω1 − ω 2 ) t + ϕ1 − ϕ 2 ] (7.30)
Кроме постоянной и гармонических составляющих на частотах 0, ω1, ω2,
2ω1, 2ω2, в составе тока появились так называемые комбинационные компонен-
ты на суммарной и разностной частотах ω1+ω2 и ω1-ω2. Частоты компонент
тока, возникших в цепи, можно определить формулой ω=pω1±qω2, где коэффи-
циенты p и q могут принимать значения:
p=q=0;
p=q=1;
p=0, q=2;
p=2, q=0.
Сумма p+q=R называется порядком комбинационной частоты. В рассмотрен-
ном примере R принимает значения 0, 1, 2.
Не прибегая к громоздким, хотя и элементарным выкладкам, обобщим полу-
ченные результаты. Можно утверждать, что при воздействии на нелинейный
двухполюсник с ВАХ аппроксимированной полиномом N-ой степени, напря-
жения в виде суммы M гармонических сигналов с различными частотами, ток
будет содержать гармоники с частотами
ω = k 1ω1 + k 2 ω 2 + ...k M ω M ,
M
где k1, k2,…kM – любые целые числа из диапазона –N…N, такие, что ∑ k i ≤ N .
i =1
Комбинационные частоты такого преобразования будут иметь порядки R≤N.
Общая схема нелинейного преобразования сигналов. Для того, чтобы
воспользоваться результатами нелинейного преобразования “напряжение –
ток”, выделив при этом выходное напряжение в виде составляющей на некото-
рой частоте (в некотором диапазоне частот), используют схему, приведенную
на рис. 7.8. Схема содержит нелинейный двухполюсник R~ и линейный
фильтр. Фильтром или сопротивлением нагрузки
u(t) uвых(t) Z(ω) , на котором выделяется выходное напряже-
R
Z(ω) ние, как правило, является частотно-избиратель-
~ ~
ный пассивный двухполюсник, например коле-
бательный контур.
При этом выходное напряжение uвых(t) прило-
Рис. 7.8. Общая схема
нелинейного преобразования
жено к нелинейному двухполюснику (внутрен-
сигналов нее сопротивление источника напряжения равно
нулю) и, вообще говоря, влияет на работу схемы.
Это влияние называется реакцией нагрузки. Реакция нагрузки может заметно
изменить спектральный состав тока в цепи.
Это обстоятельство принимают во внимание при анализе и разработке кон-
кретных радиотехнических устройств. Иногда полагают u вых ( t ) << u ( t ) и ре-
90
10. акцией нагрузки пренебрегают. В то же время существуют устройства, в работе
которых реакция нагрузки предусмотрена и очень существенна.
Нелинейное резонансное усиление.
Рассмотрим усилительный каскад с нагрузкой в виде параллельного колеба-
тельного контура, упрощенная схема которого изображена на рис.7.9. Нелиней-
VT
С L
~ E cosω t
m 0
U0
Eпит
Рис. 7.9. Нелинейный резонансный
усилитель
ным элементом здесь является полевой транзистор VT. Используем кусочно-ли-
нейную аппроксимацию проходной ВАХ, т.е. зависимости тока стока от напря-
жения на затворе i=f(u) транзистора. Пусть на входе действует напряжение
u(t) = U0+Ecos(ω1t+φ1).
Каскад работает с отсечкой, так что ток представляет собой последователь-
ность косинусоидальных импульсов. Без учета реакции нагрузки (контура) на
работу каскада амплитуды гармоник коллекторного тока представляются фор-
мулами
I n = γ n (θ)SE .
Если контур настроен на частоту первой гармоники ω1, то амплитуда выход-
ного напряжения
U m вых = γ 1 (θ)SER э , (7.31)
где RЭ – эквивалентное сопротивление контура.
Для качественного анализа особенностей работы нелинейного резонансного
усилителя рассмотрим рис. 7.10, на котором представлены временные зависи-
мости тока стока i(t), первой гармоники тока i1(t) и выходного напряжения кас-
када
uвых(t)=Eпит - Umвыхcos(ω1t), (7.32)
где Eпит – напряжение источника питания каскада. Частотно-избирательная на-
грузка позволяет эффективно использовать нелинейную ВАХ транзистора: ам-
плитуда выходного напряжения Umвых достигает значений, близких к Eпит, так
что в некоторые моменты времени выходное напряжение превосходит напря-
жение питания (uвых(t)>Eпит). Этим обусловлен большой коэффициент усиления
нелинейного резонансного усилителя. Как и резистивный усилительный каскад
91
11. с общим истоком, нелинейный резонансный усилитель инвертирует (поворачи-
вает на 180°) фазу входного напряжения.
Зависимость амплитуды выходного сигнала Umвых от амплитуды входного
напряжения E называется амплитудной характеристикой. Она также называет-
ся колебательной характеристикой нелинейного резонансного усилителя. К
ней предъявляется требование линей-
i(t) ности, особенно при работе с АМ-сиг-
налами. Но аргумент функции γ1(θ)
связан с E нелинейной зависимостью:
0 ωt U − U0
I1cosω1t θ = arccos 1 ,
E
и анализируя эту зависимость при за-
данных U1 и U0, можно лишь указать
0 интервал допустимых с точки зрения
ωt
линейности значений E. Оптимальным
является выбор U1 = U0, так как
uвых(t) γ1(π/2) = 1/2
и колебательная характеристика ока-
зывается при этом линейной:
Eпит 1
U mввы = SER э .
2
Нелинейные резонансные усилите-
ωt ли частот используются как выходные
Рис. 9.10. нелинейное резонансное усиление. каскады мощных радиопередающих
устройств, и существенным оказывает-
ся их коэффициент полезного действия η, под которым подразумевается отно-
шение выделяемой в колебательном контуре мощности первой гармоники к
мощности, потребляемой каскадом от источника питания. Обычно, как уже ука-
зывалось, Umвых ≈ Eпит и
1
U mввы I1
2 γ (θ) (7.33)
η= ≈ 1 .
E пит I ′
0 2 γ 0 ( θ)
При θ =π/2 (с учетом требования линейности колебательной характеристики)
γ = π/4 ≈ 0,785.
Резонансное умножение частоты.
Если в схеме нелинейного резонансного усилителя контур настроить на ча-
стоту nω1 – частоту одной из высших гармоник, то нелинейный резонансный
усилитель можно использовать в качестве умножителя частоты. Потребность в
умножителях возникает, например, при разработке источников гармонических
колебаний с высокой стабильностью частоты, если непосредственное создание
такого источника в заданном диапазоне частот невозможно или затруднено, но
имеется высокостабильный низкочастотный генератор. Трудность создания
92
12. подобных умножителей связана с относительно малыми значениями функций
Берга γn(θ) при больших n. Оптимальный для максимизации амплитуды тока n-
й гармоники при заданном значении E угол отсечки определяется соотношени-
ем θопт ≈ π/n.
Получение амплитудно-модулированных колебаний.
Процедура амплитудной модуляции состоит в нелинейном преобразовании
суммы высокочастотного гармонического (ω0 – несущая частота) и низкоча-
стотного модулированного сигналов. В качестве модулирующего сигнала возь-
мем гармоническое колебание и рассмотрим преобразование бигармонического
сигнала
u(t) = U0+Ecosω0t+UΩcosΩt, ω0>>Ω, (7.34)
в н6линейном двухполюснике с ВАХ
i = a1u+a2u2. (7.35)
Интересующие нас составляющие тока:
i(t) = …(a1E+2a2U0E)cosω0t+a2EUΩcos(ω0+ Ω)t+a2EUΩcos(ω0-Ω)t+…
представляют амплитудно-модулированное чистым тоном колебание
2a 2
a 1E (1 + U Ω cos Ω t ) cos ω 0 t (7.36)
a 1 + 2a 2 U 0
с коэффициентом модуляции
2a 2
M= UΩ .
a 1 + 2a 2 U 0
Структурная схема амплитудного модулятора представлена на рис. 7.11.
При подаче сигнала (7.34) на вход нелинейного резонансного усилителя после-
довательность импульсов тока оказывается промодулированной по амплитуде
ω0 Нелинейный АМ колебание
Автогенер
резонансный
атор
усилитель
s(t)
Рис. 7.11. Структурная схема амплитудного модулятора.
(рис. 7.12). Эта последовательность может быть представлена выражением:
93
13. i(t) i(t)
U0 U1
0 u 0 ω0t
ω0t
Рис. 7.12. Амплитудная модуляция
U
U1 − U 0 (1 + Ω cos Ωt
U0
i( t ) = S( U 0 + E cos ω0 t + U Ω cos Ωt − U1 ) = SE cos ω0 t −
E
Здесь правая часть отлична от нуля в пределах, определяемых углом отсеч-
ки. Но модулирующее напряжение перемещает рабочую точку в пределах
U0+UΩ … U0-UΩ, что приводит к периодическому изменению угла отсечки как
функции UΩ. Углы отсечки меняются в пределах:
U − U0 − UΩ
θ max = arccos 1 ,
E
U − U 0 + UΩ
θ min = arccos 1 ,
E
а максимальное и минимальное значения амплитуды первой гармоники тока
равны:
I1max = γ 1 (θ max )SE,
I1min = γ 1 (θ min )SE.
Если модуляционная характеристика I1 = f(UΩ) линейна, то по формуле
I − I1min
M = 1max
I1max + I1min
94
14. можно определить коэффициент модуляции. Можно показать, что линейность
модуляционной характеристики оказывается удовлетворительной, если угол от-
сечки меняется в пределах 40…140°.
АМ-сигнал выделяется с помощью частотно-избирательной нагрузки каска-
да.
Амплитудное детектирование.
Операция амплитудного детектирования (демодуляции) противоположна ам-
плитудной модуляции. На входе амплитудного детектора действует АМ-коле-
бание, которое в общем виде, с учетом смещения, определяющего положение
рабочей точки, может быть представлено так:
u(t) = U0+U(t)cosω0t. (7.37)
На выходе идеального детектора должен присутствовать низкочастотный
сигнал, пропорциональный U(t). Таким образом, при амплитудном детектирова-
нии частотно-избирательной нагрузкой должен быть ФНЧ, в качестве которого
часто используют параллельную RC-цепочку.
Квадратичное детектирован6ие. Рассмотрим преобразование сигнала
(7.37) нелинейным двухполюсником с ВАХ
i = a1u+a2u2.
В этом случае ток
2 1 1
i( t ) = a 1 U 0 + a 2 U 0 + a 2 U 2 ( t ) + (a 1 + 2a 2 U 0 ) U( t ) cos ω 0 t + a 2 U 2 ( t ) cos 2ω 0 t
2 2
действительно содержит низкочастотную компоненту a 2 U ( t ) / 2 , которая мо- 2
жет быть выделена ФНЧ; однако имеет место нелинейное (квадратичное) иска-
жение информационного (модулирующего) сигнала, допустимое только при
приеме простого амплитудно-манипулированного колебания. Необходимо
иметь устройство, выделяющее передавае-
Eпит мый сигнал без искажений.
Линейное детектирование. Пусть на
входе амплитудного детектора действует
АМ-колебание, в качестве которого при-
R C мем сигнал, модулированный чистым то-
ном:
u(
t) =
Um(1+
~ u(t) McosΩt
)cosω0t;
= U0
(7.38)
на выходе необходимо получить низкоча-
стотное колебание
Рис. 7.13. Коллекторный детектор uвых(t) = UmвыхcosΩt. (7.39)
95
15. Рассмотрим схему коллекторного детектора, представляющего собой усили-
тельный каскад с нагрузкой в виде параллельной RC-цепочки (рис. 7.13). На
вход этой схемы поступает сигнал (7.38) со смещением U0, при этом амплитуда
Um достаточно велика, чтобы можно было воспользоваться кусочно-линейной
аппроксимацией ВАХ. Упрощая рассмотрение, положим U1 = U0, так что угол
отсечки θ = 90° и не зависит от амплитуды входного сигнала.
Процессы в коллекторном детекторе иллюстрируются графиками, приведен-
ными на рис. 7.14.
i i
U0 = U1
0 u ω0t
0
uвых(t)
MUmcosθ
ω0t ω0t
Рис. 7.14. Амплитудное детектирование
(коллекторный детектор)
Последовательность импульсов коллекторного тока промодулирована по ам-
плитуде, при этом постоянная составляющая тока изменяется во времени с ча-
стотой Ω:
π
I ′ = SU m (1 + M cos Ω t ) γ 0 ( ) = 0,318SU m (1 + M cos Ωt ),
0
2
а выходное напряжение детектора
u вых ( t ) = E пит − I ′ R = E пит − 0,318SRU m (1 + M cos Ωt ) .
0 (7.40)
Коэффициентом детектирования называется отношение амплитуды изме-
нения выходного сигнала к амплитуде изменения огибающей входного сигнала:
U m вых
kД = . (7.41)
MU m
Здесь
96
16. 1
MU m = ( U m (1 + M) + U m (1 − M ) .
2
Коэффициент детектирования коллекторного детектора kД = 0,318SR.
Для эффективной работы детектора необходимо обеспечить выполнение
условий:
1 1 (7.42)
>> R >> ,
Ω max C ω0 C
где Ωmax – максимальная частота спектра передаваемого НЧ-сигнала (модули-
рующего колебания).
Характеристикой детектирования называется зависимость I0 = f(Um). Оче-
видно, что при θ = 90° коллекторный детектор является линейным детектором.
Если же условие U1 =U0 не выполняется, то следует установить, в каких преде-
лах должна изменяться амплитуда Um, для которых характеристика детектиро-
вания приближенно является линейной.
Амплитудный линейный диодный детектор. Простой и широко распро-
страненной является схема диодного детектора (рис. 7.15). Для анализа работы
- + +
R C
uвых(t)
~ -
Рис. 7.15. Амплитудный диодный
детектор
этой схемы примем следующие предположения:
1) детектор работает при достаточно большом уровне входного сигнала, так
что используется кусочно-линейная аппроксимация ВАХ диода при U1 = 0;
2) сопротивление нагрузки детектора R значительно превышает внутреннее
сопротивление открытого диода Ri = 1/S, где S – крутизна ВАХ диода:
RS>>RiS = 1. (7.43)
Работу схемы удобно рассматривать, задавая вначале входной сигнал в виде
гармонического колебания
u(t), uвых(t) uвых(t) Umcosω0t. Емкость C заряжа-
ется при открытом диоде с
постоянной времени RiC,
разряжается при закрытом
U= = -U0 диоде. Так как выполняется
t условие (7.42), разряд емко-
сти происходит гораздо
u(t) медленнее, с постоянной
времени RC. В течение
Рис.7.16. Пульсирующее напряжение uвых(t)
97
на выходе амплитудного диодного детектора.
17. нескольких периодов входного сигнала после его подачи напряжение на емко-
сти (выходное напряжение диодного линейного детектора) достигает значения,
близкого к амплитуде входного сигнала (рис.7.16). Это же напряжение прило-
жено к диоду и запирает его, так что в установившемся режиме большую часть
времени диод закрыт (рис. 7.17). Почти постоянное напряжение U= является
напряжением смещения: U= = -U0.
i
U0 0
u
ω0t
Рис. 7.17. Режим отсечки в схеме диодного
детектора.
Коэффициентом детектирования в данном случае называется отношение U=/
Um.
U1 − U 0
Так как cos θ = и U1 = 0, то
Um
kД =U=/Um = cosθ.
Выходное напряжение диодного детектора можно определить, если восполь-
зоваться формулами
a sin θ − θ cos θ sin θ − θ cos θ I
I′ = 0 = I m
0 = SE и γ n = n , I n = γ n SE :
2 π(1 − cos θ) π SE
sin θ − cos θ
− U 0 = I′ R = SRU m γ 0 (θ) = SRU m
0 ,
π
Откуда следует уравнение
π
tgθ − θ = . (7.44)
RS
Учитывая, что угол отсечки мал, можно разложить tgθ в степенной ряд.
Ограничимся тремя первыми членами разложения
θ 3 2θ 5
tgθ = θ + + + ...
3 15
98
18. Тогда коэффициент детектирования, выраженный через параметры элемен-
тов схемы:
3π 3π
θ3 ≈ , k Д = cos θ ≈ cos (7.45)
RS RS
Если на вход диодного детектора поступает АМ-сигнал, то при правильно
выбранных значениях R и C, т.е. при выполнении условий (9.23), выходное
напряжение “отслеживает” мгновенный уровень амплитуды входного сигнала;
тем самым реализуется линейное детектирование.
Частотное и фазовое детектирование.
Высокочастотное колебание с угловой модуляцией в общем виде записыва-
ется так:
u(t) = Ucos(ω0t+θ(t)). (7.46)
Передаваемая информация содержится в функции θ(t). На выходе частотного
детектора должно быть напряжение:
dθ( t ) ,
u чд ( t ) = S чд
dt
На выходе фазового детектора:
u фд = S фд θ( t ) ,
где Sчд и Sфд – крутизна преобразования частотного и фазового детектора соот-
ветственно.
Рассмотрим нелинейное преобразование сигнала (7.46), предположив, что
модуляция тональная, т.е. θ(t) = msinΩt, где m – индекс модуляции.
Пусть ВАХ нелинейного двухполюсника аппроксимирована полиномом
i = a1u+a2u2.
В этом случае ток
i( t ) = a 1 U cos(ω 0 t + m sin Ωt ) + a 2 U 2 cos(ω 0 t + m sin Ωt ) =
1 1 (7.47)
a 2 U 2 + a 1 U cos(ω 0 t + m sin Ωt ) + a 2 U 2 cos 2(ω 0 t + m sin Ωt ).
2 2
Из этого выражения видно, что ток не содержит низкочастотной составляю-
щей UвыхsinΩt.
Раньше было установлено, что трансформация спектра, приводящая к воз-
никновению новых спектральных составляющих, происходит при нелинейном
преобразовании. Поэтому детектирование АМ-колебаний может быть сведено к
переносу спектра высокочастотно сигнала в область низких частот. Но сейчас
низкочастотная составляющая тока a2U2/2 не содержит информации о модули-
рующем сигнале.
Поэтому для детектирования колебаний с угловой модуляцией недостаточно
нелинейного преобразования только относительно амплитуды колебания. Необ-
ходимы дополнительные преобразования, причем надо отдельно рассматривать
частотное и фазовое детектирование.
99
19. Детектирование частотно-модулированного сигнала. Частотный детек-
тор можно создать, используя сочетание избирательной цепи, преобразующей
Рис. 7.18. Частотный детектор с
расстроенным колебательным контуром.
частотно-модулированный сигнал в амплитудно-модулированный, и амплитуд-
ного детектора. Схема такого детектора приведена на рис. 7.18. если резонанс-
ная частота контура отличается от средней частоты ЧМ-сигнала ω0, то ам-
плитуда напряжения на контуре будет (при девиации частоты ωд, не выходя-
щей за пределы линейного участка ската АЧХ контура) изменяться пропорцио-
|K(ω)|
uвых(t)
0 ω0 ω t
0
t
Рис. 7.19.Частотное детектирование
нально мгновенной частоте сигнала, т.е. будет соответствовать закону модуля-
ции (рис. 7.19).
Полученный таким образом высокочастотный сигнал со смешанной ам-
плитудно-частотной модуляцией поступает на амплитудный линейный детек-
тор, реагирующий только на изменение амплитуды входного сигнала.
Существует много более сложных, практически используемых схем частот-
ных детекторов, работающих на основе рассмотренного принципа.
100
20. Фазовое детектирование. Для фазового детектирования тоже существует
много различных детекторов, которые изучаются в других специальных дисци-
плинах.
Но можно сказать, что рассмотренный частотный детектор можно использо-
вать и для фазового детектирования, дополнив его интегрирующей цепью, кор-
ректирующей выходной сигнал.
Рассмотрим дополнительно еще одну возможность фазового детектирова-
ния. Рассмотрим преобразование суммы фазо-модулированного сигнала
u(t) = Ucos(ω0t+θ(t)) (7.48)
и гармонического колебания
uг(t) = Uгcos(ωгt+φг) (7.49)
в нелинейном двухполюснике с ВАХ
i = a2u2. (7.50)
В составе тока появятся составляющие на суммарной и разностной частотах:
i ω0 ±ωг ( t ) = ...a 2 UU г cos[(ω 0 + ω г ) t + θ( t ) + ϕ г ] +
a 2 UU г cos[(ω 0 − ω г ) t + θ( t ) − ϕ г ] + ...
(7.51)
Пусть ω0 = ωг. В этом случае получим постоянную составляющую тока:
i( t ) = ...a 2 UU г cos[θ( t ) − ϕ г ]... = a 2 UU г cos θ( t ) cos ϕ г + sin θ( t ) sin ϕ г ]...
Если φг = π/2 и θ(t) изменяется в небольших пределах (sinx ≈ x при малых x),
фильтр нижних частот выделит сигнал, пропорциональный модулирующему:
i(t) ≈ …a2UUгθ(t). (7.52)
Реализация такого фазового детектора затруднена необходимостью жесткой
стабилизации частоты и фазы генератора гармонического колебания uг(t). Кро-
ме того, накладывается требование малого индекса модуляции.
Преобразование частоты (Перенос несущей частоты или спектра сигна-
ла).
Рассмотрим теперь нелинейное преобразование суммы гармонического ко-
лебания
uг(t) =Uгcos(ωгt+φг) (7.53)
и узкополосного радиосигнала, в качестве которого возьмем амплитудно-моду-
лированный сигнал с тональной модуляцией
u(t) = Um(1+McosΩt)cos(ω0t+θ0). (7.54)
ВАХ нелинейного элемента, так же, как и при анализе фазового детектора,
аппроксимируем функцией i = a2u2. Из составляющих тока рассмотрим только
гармоники на суммарных и разностных частотах:
101
21. i ω0 +ωг = ...a 2 U m U г cos[(ω 0 + ω г ) t + θ 0 + ϕ г ] +
1
+ a 2 MU m U г cos[(ω 0 + ω г + Ω) t + θ 0 + ϕ г ] +
2
1
+ a 2 MU m U г cos[(ω 0 + ω г − Ω) t + θ 0 + ϕ г ] +
2
+ a 2 U m U г cos[(ω 0 − ω г ) t + θ 0 − ϕ г ] +
1
+ a 2 MU m U г cos[(ω 0 − ω г + Ω) t + θ 0 − ϕ г ] +
2
1
+ a 2 MU m U г cos[(ω 0 − ω г − Ω) t + θ 0 − ϕ г ]... =
2 (7.55)
= ...a 2 U m U г (1 + M cos Ωt ) cos[(ω 0 + ω г ) t + θ 0 + ϕ г ] +
+ a 2 U m U г (1 + M cos Ωt ) cos[(ω 0 − ω г ) t + θ 0 − ϕ г ]...
В составе тока присутствуют компоненты амплитудно-модулированных сиг-
налов, аналогичных исходному сигналу, но с “перенесенными”, смещенными
относительно ω0 несущими частотами ω0±ωг. Рисунок 7.20 иллюстрирует
S(ω) ω0>ωг
а)
Б Б Б
А А А
0 ω0-ωг ω
г
ω0 ω0+ωг ω
S(ω) ω0<ωг
б)
Б Б Б
А А А
0 ω0-ωг
ωг ω0 ω0+ωг ω
Рис. 7.20. Преобразование частоты
рассмотренное преобразование. Буквами А и Б обозначены боковые полосы мо-
дулированного колебания. При переносе “вверх” структура спектра сохраняет-
ся, а при переносе вниз результат зависит от соотношения ω0 и ωг. Если ω0>ωг,
то структура спектра сохраняется (рис.7.20 а), если ω0<ωг, то верхняя и нижняя
102
22. боковые полосы меняются местами, инвертируются (рис.9.20 б), что в некото-
рых случаях может иметь значение.
Все компоненты преобразованных АМ-сигналов приобретают одинаковый
фазовый сдвиг φг.
Рассмотренное преобразование называется также гетеродинированием. Оно
очень широко применяется в радиотехнике.
Синхронное детектирование.
Пусть в рассмотренном выше преобразовании частоты ω0 = ωг. В этом слу-
чае ток будет содержать постоянную составляющую:
i(t) = …a2U(t)Uгcos(θ0-φг)…, (7.56)
совпадающую по форме с огибающей АМ-сигнала, которую можно выделить,
используя ФНЧ.
Этот метод детектирования называется синхронным. Его достоинством яв-
ляется возможность повысить качество приема на фоне шума. Однако реализа-
ция этого метода затруднена необходимостью с высокой точностью поддержи-
вать соотношения ω0 = ωг и θ0 = φг =const, т.е. синхронизм частот гетеродина и
принимаемого сигнала.
103