Downloaded 12 times

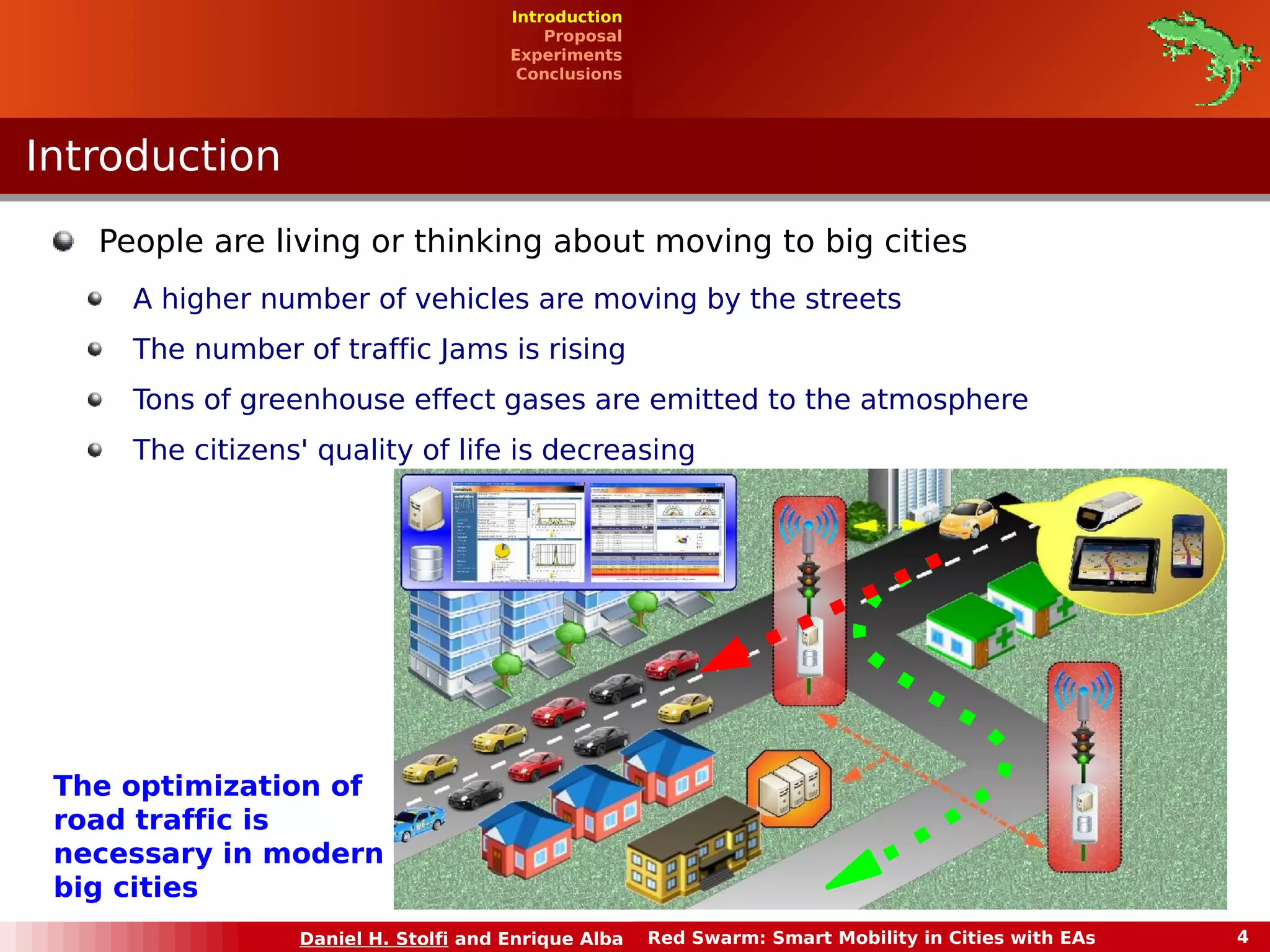
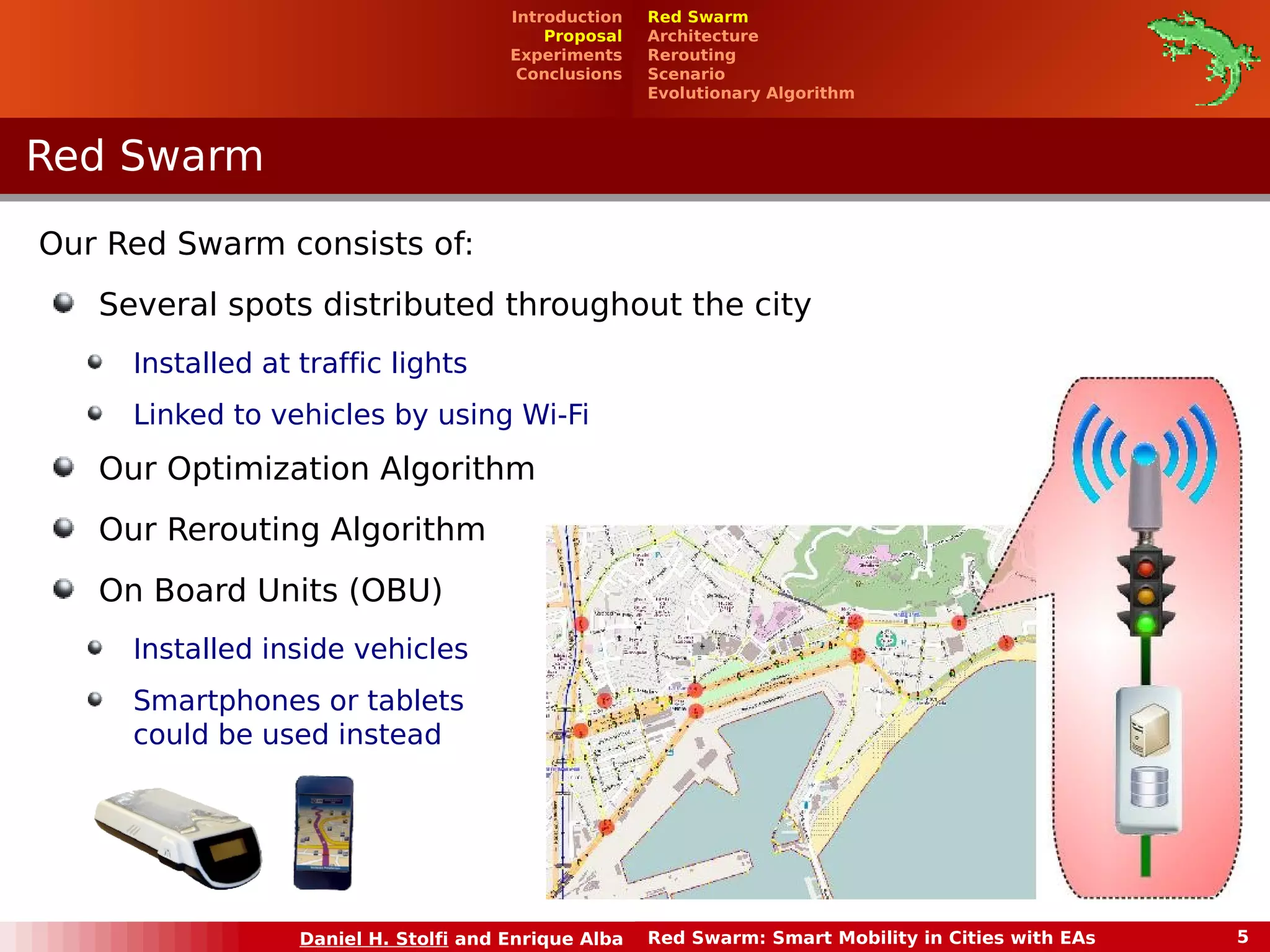
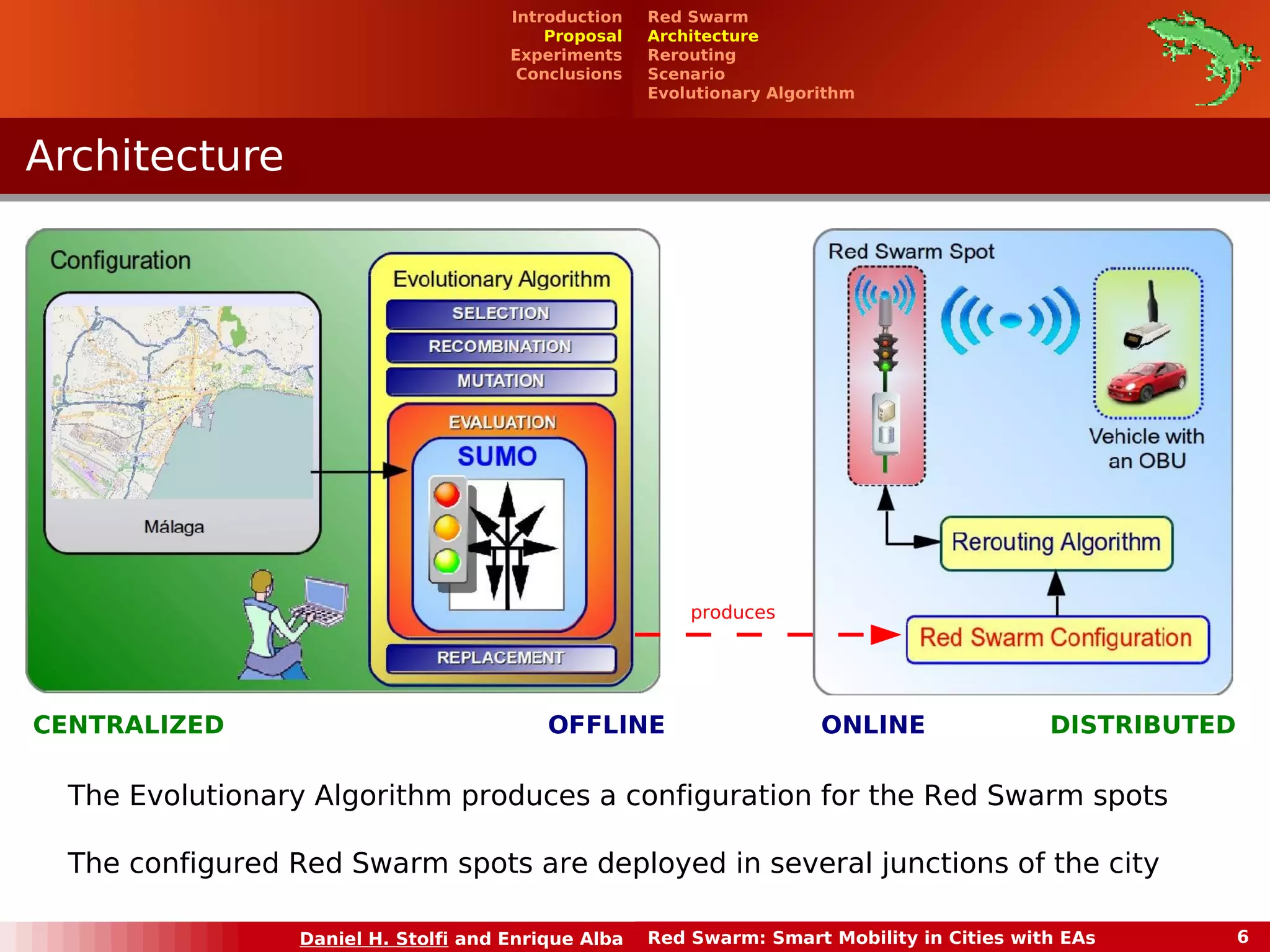
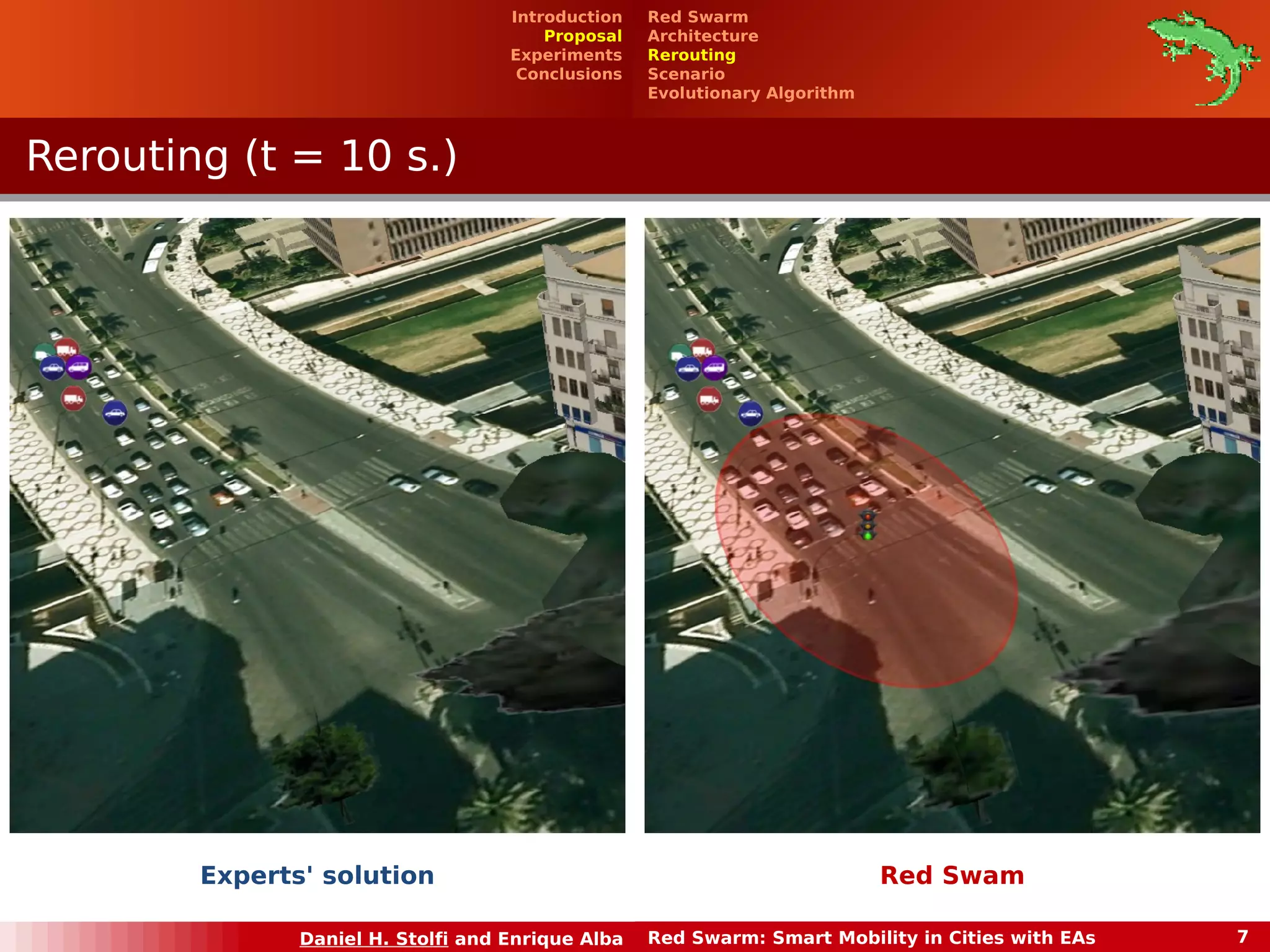
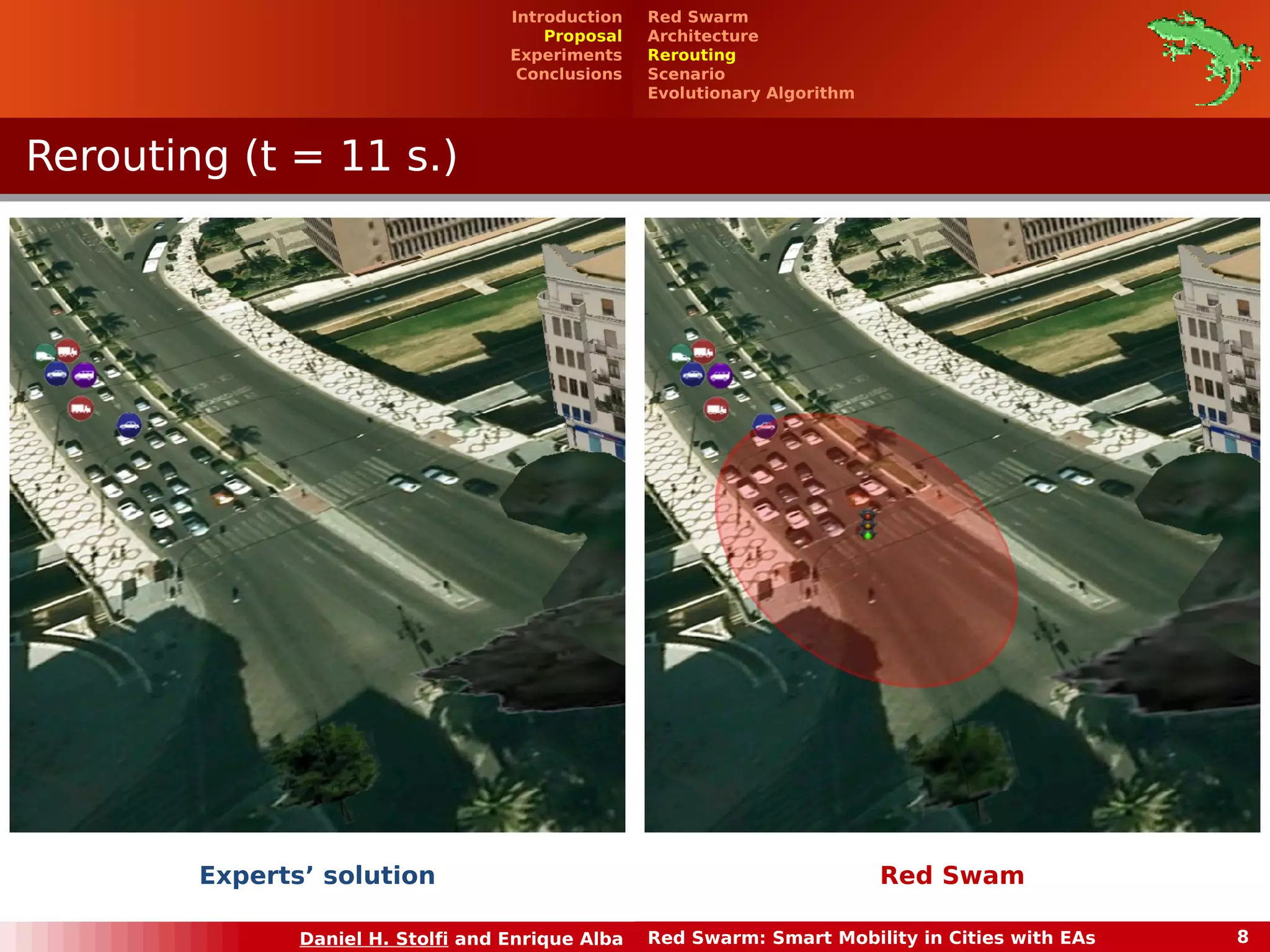
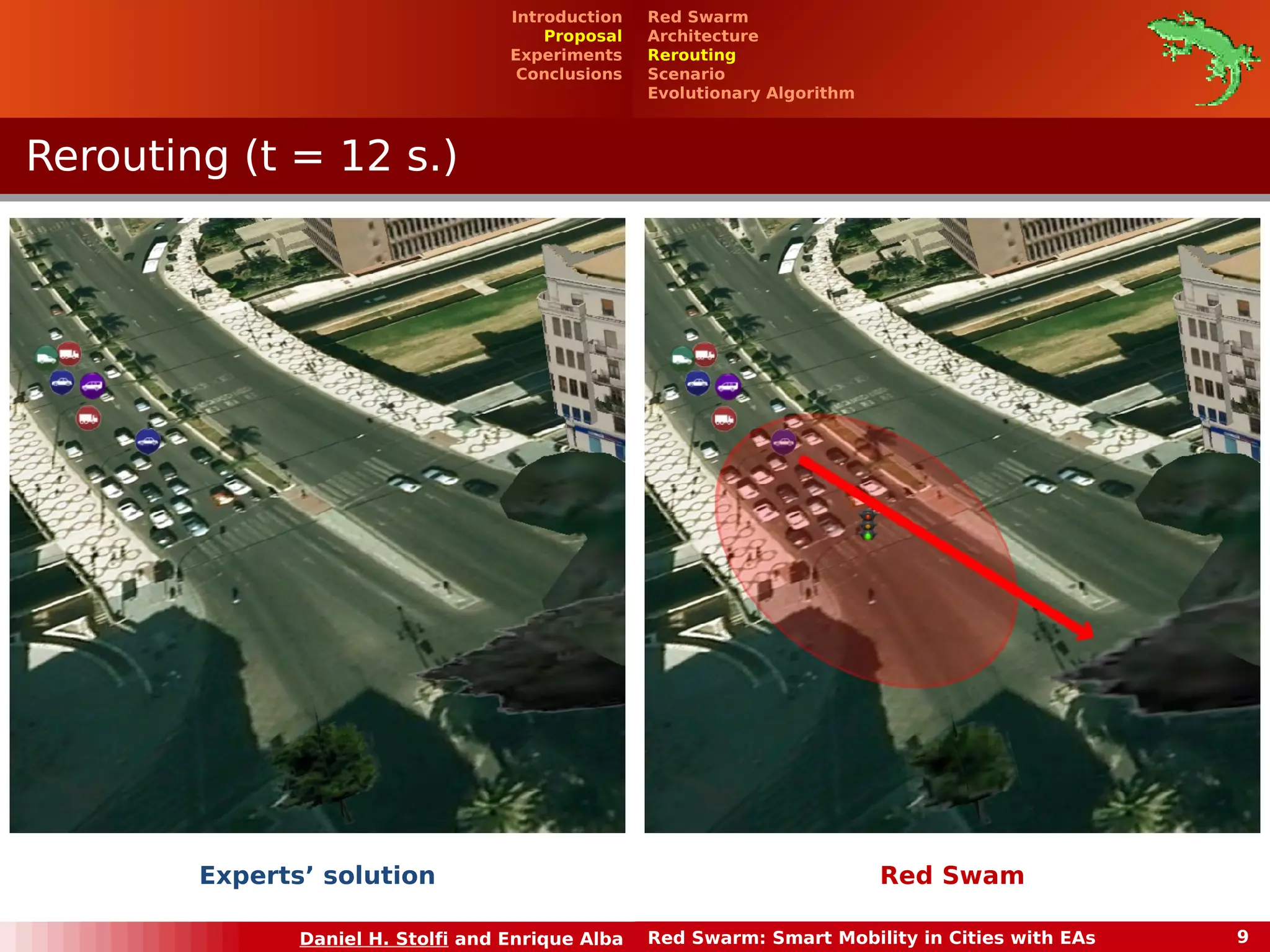
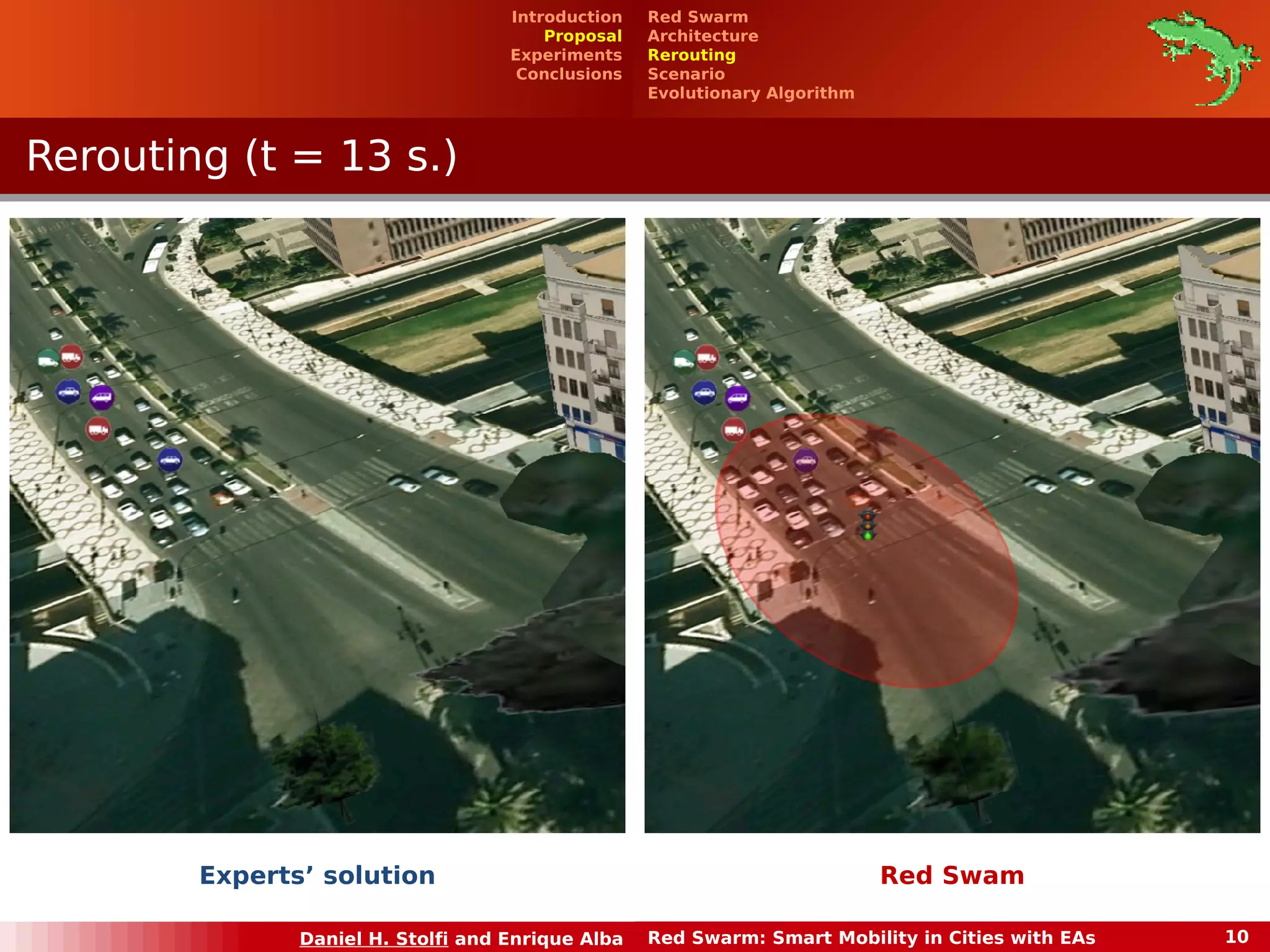
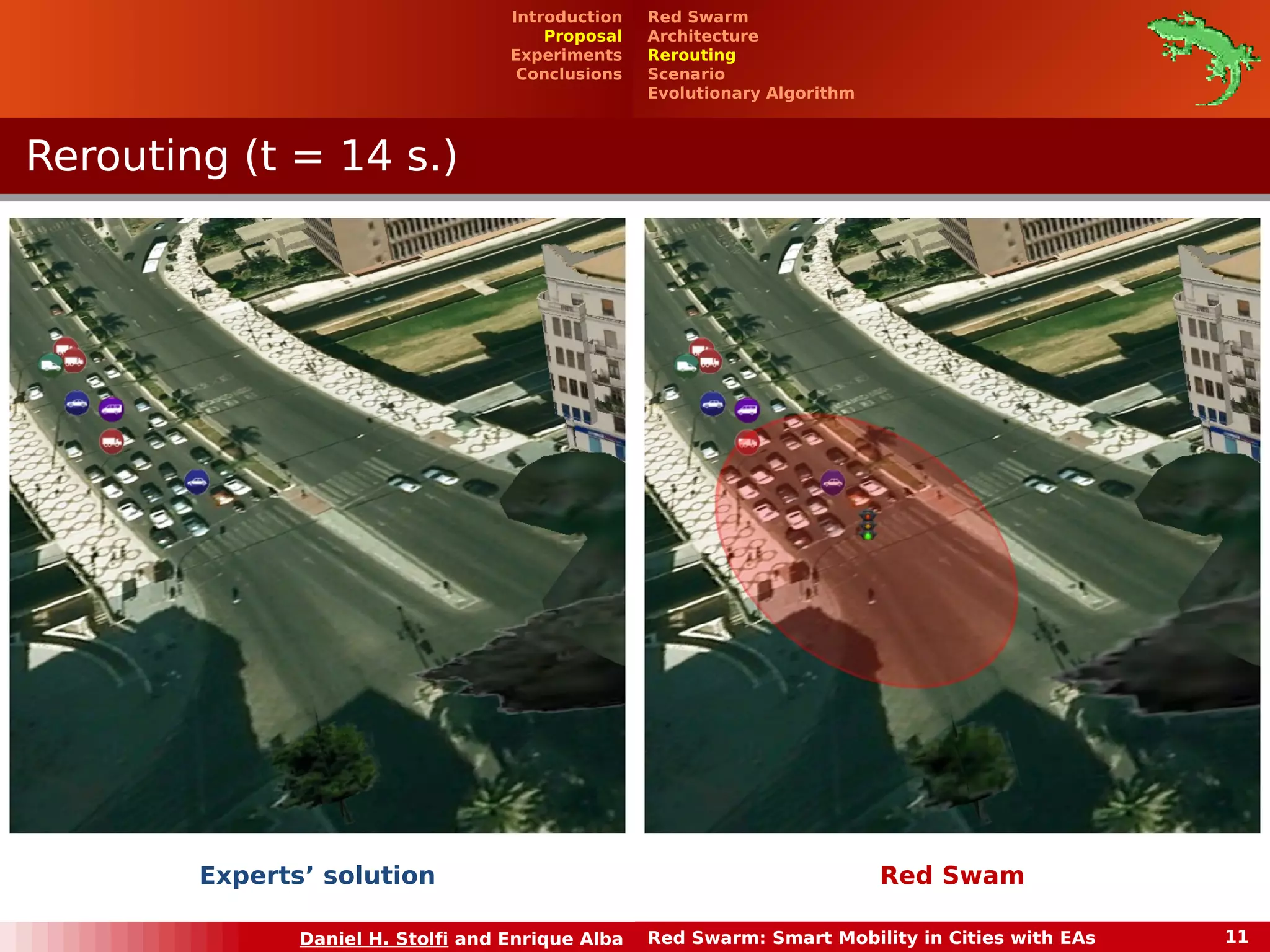

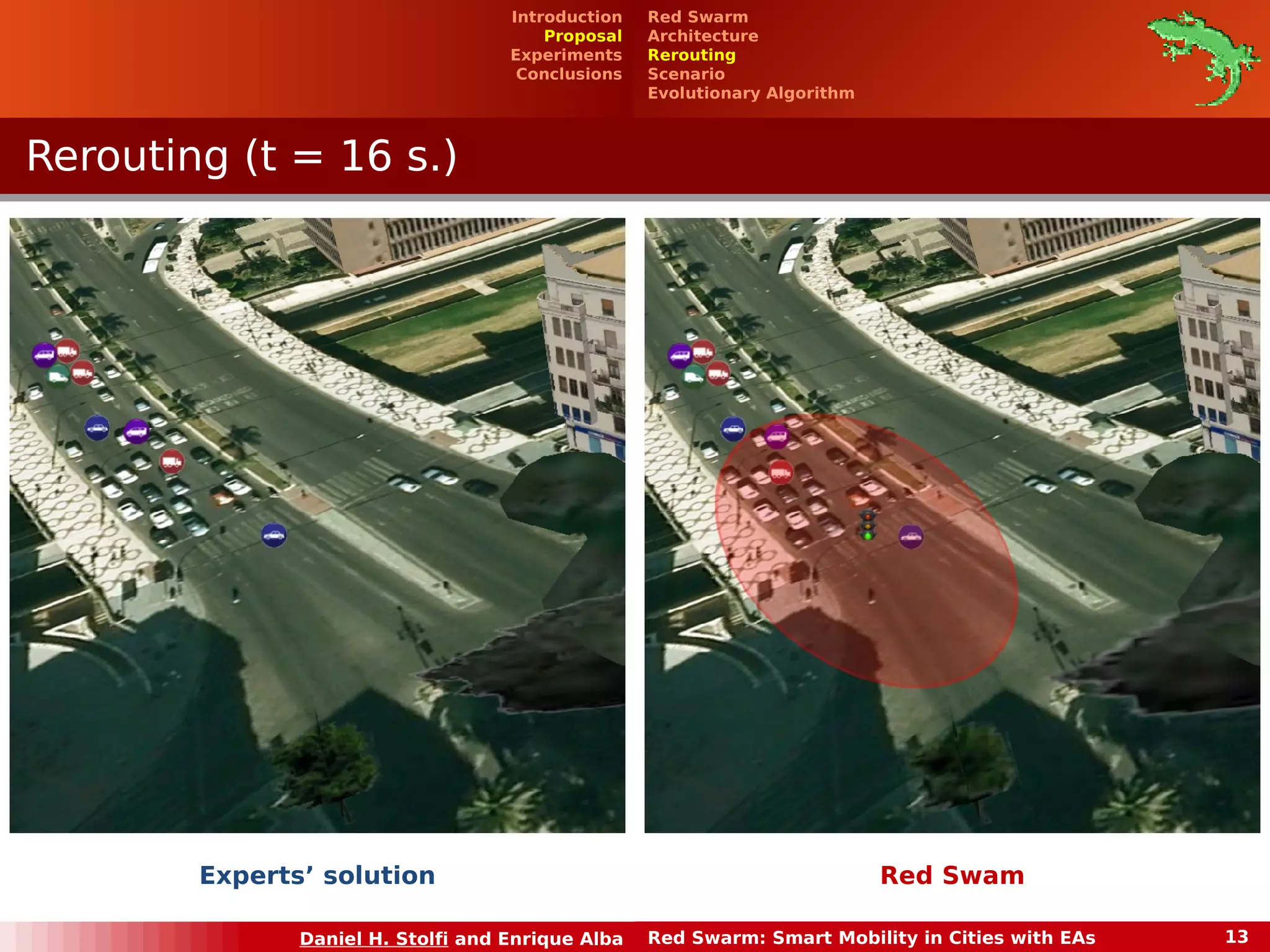


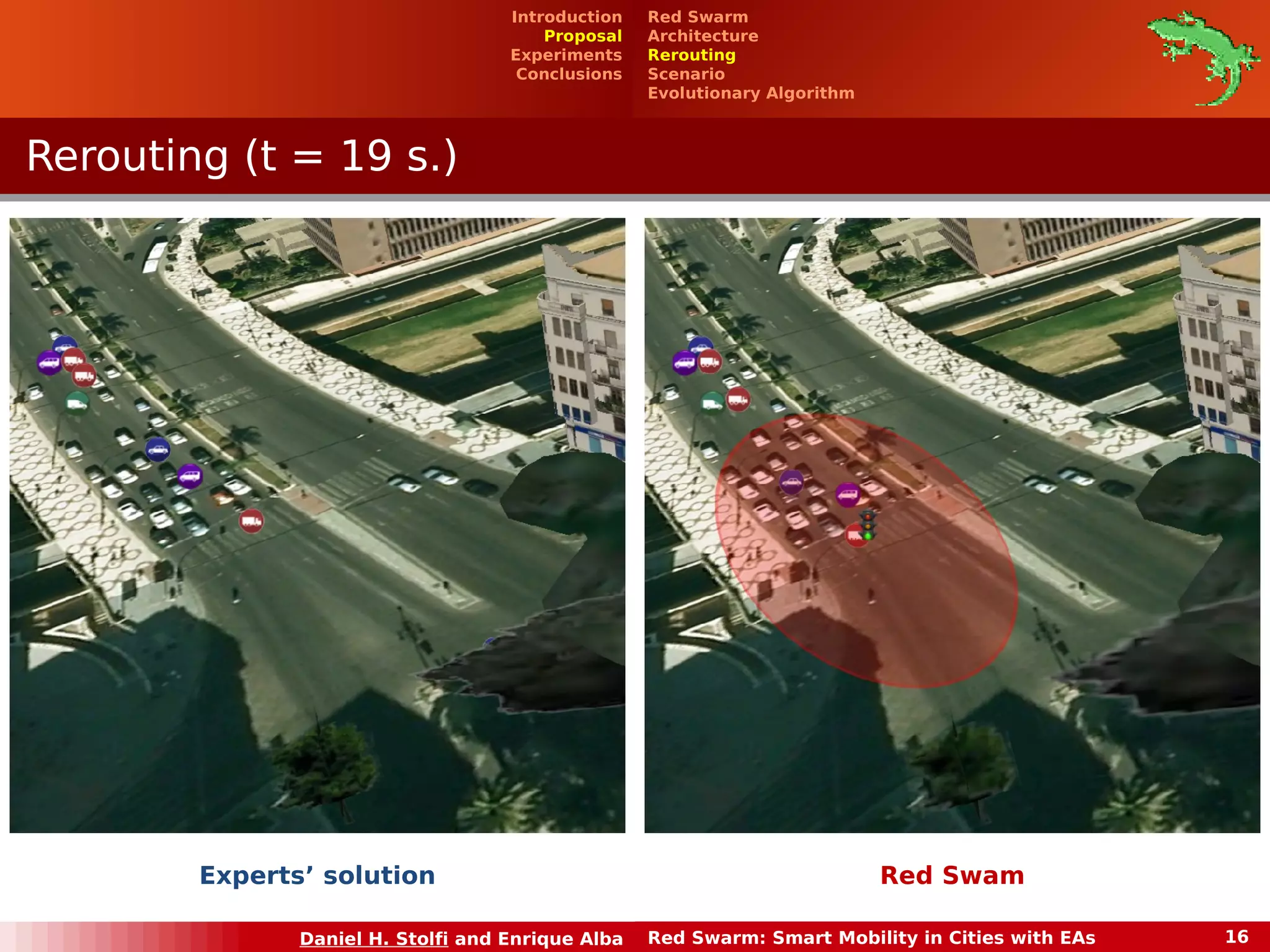



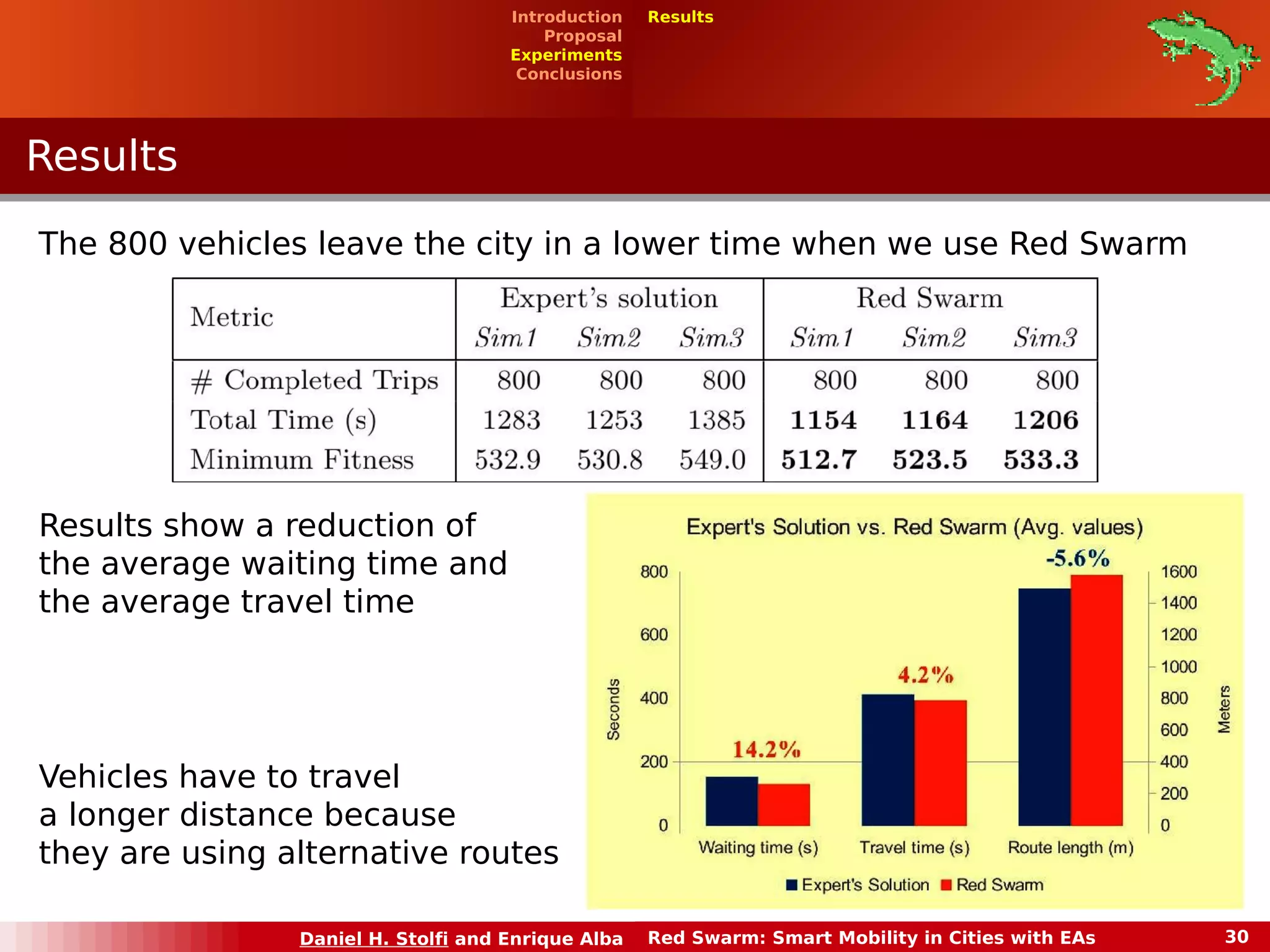

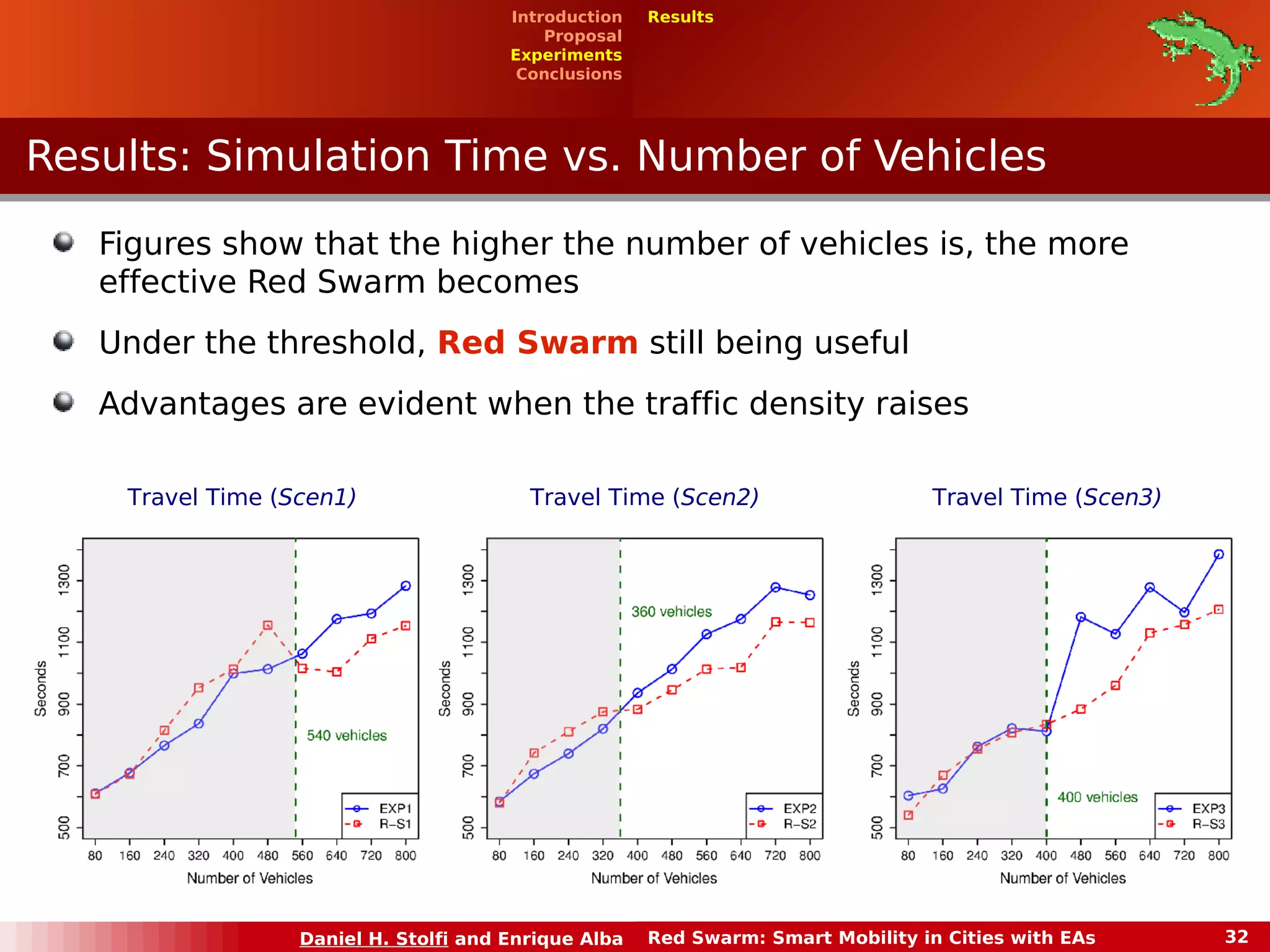




The document discusses 'Red Swarm', a smart mobility solution aimed at optimizing road traffic in cities to reduce congestion and greenhouse gas emissions. It outlines the architecture, rerouting algorithms, and experimental scenarios employing evolutionary algorithms for traffic management. Results demonstrate that Red Swarm effectively decreases travel and waiting times for vehicles in urban areas.















































