Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yoshiro Suzuki
PPTX, PDF
329 views
Collision monitoring of foreign object on cfrp laminate utilizing electrostatic induction
静電誘導を利用したCFRP積層板に対する異物の衝突モニタリング
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 21
2
/ 21
3
/ 21
4
/ 21
5
/ 21
6
/ 21
7
/ 21
8
/ 21
9
/ 21
10
/ 21
11
/ 21
12
/ 21
13
/ 21
14
/ 21
15
/ 21
16
/ 21
17
/ 21
18
/ 21
19
/ 21
20
/ 21
21
/ 21
More Related Content
PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
PPTX
抵抗加熱利用の電気抵抗変化法による複合材製航空機の全域損傷モニタリング
by
Yoshiro Suzuki
PPTX
Deep learning ultrasonic
by
Yoshiro Suzuki
PPTX
Multiscale analysis using convolutional neural network
by
Yoshiro Suzuki
PPTX
Smart lightning protection skin for realtime load monitoring of composite air...
by
Yoshiro Suzuki
PPTX
Japanese nonlinear multiscale analysis 20181207
by
Yoshiro Suzuki
PPTX
Topology optimization using convolutional neural network
by
Yoshiro Suzuki
PPTX
English nonlinear multiscale analysis 20181207
by
Yoshiro Suzuki
2024 Trend Updates: What Really Works In SEO & Content Marketing
by
Search Engine Journal
抵抗加熱利用の電気抵抗変化法による複合材製航空機の全域損傷モニタリング
by
Yoshiro Suzuki
Deep learning ultrasonic
by
Yoshiro Suzuki
Multiscale analysis using convolutional neural network
by
Yoshiro Suzuki
Smart lightning protection skin for realtime load monitoring of composite air...
by
Yoshiro Suzuki
Japanese nonlinear multiscale analysis 20181207
by
Yoshiro Suzuki
Topology optimization using convolutional neural network
by
Yoshiro Suzuki
English nonlinear multiscale analysis 20181207
by
Yoshiro Suzuki
Recently uploaded
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
Featured
PDF
Everything You Need To Know About ChatGPT
by
Expeed Software
PPTX
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
PDF
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
PDF
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
PDF
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
PDF
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
PDF
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
PDF
Introduction to Data Science
by
Christy Abraham Joy
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
PDF
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
PDF
Getting into the tech field. what next
by
Tessa Mero
PDF
Skeleton Culture Code
by
Skeleton Technologies
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
PDF
Content Methodology: A Best Practices Report (Webinar)
by
contently
Everything You Need To Know About ChatGPT
by
Expeed Software
How to Prepare For a Successful Job Search for 2024
by
Albert Qian
How Race, Age and Gender Shape Attitudes Towards Mental Health
by
ThinkNow
Social Media Marketing Trends 2024 // The Global Indie Insights
by
Kurio // The Social Media Age(ncy)
5 Public speaking tips from TED - Visualized summary
by
SpeakerHub
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis...
by
OECD Directorate for Financial and Enterprise Affairs
Storytelling For The Web: Integrate Storytelling in your Design Process
by
Chiara Aliotta
PEPSICO Presentation to CAGNY Conference Feb 2024
by
Neil Kimberley
How to have difficult conversations
by
Rajiv Jayarajah, MAppComm, ACC
2024 State of Marketing Report – by Hubspot
by
Marius Sescu
Product Design Trends in 2024 | Teenage Engineerings
by
Pixeldarts
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR...
by
SocialHRCamp
Introduction to Data Science
by
Christy Abraham Joy
Trends In Paid Search: Navigating The Digital Landscape In 2024
by
Search Engine Journal
AI Trends in Creative Operations 2024 by Artwork Flow.pdf
by
marketingartwork
ChatGPT and the Future of Work - Clark Boyd
by
Clark Boyd
Getting into the tech field. what next
by
Tessa Mero
Skeleton Culture Code
by
Skeleton Technologies
Google's Just Not That Into You: Understanding Core Updates & Search Intent
by
Lily Ray
Content Methodology: A Best Practices Report (Webinar)
by
contently
Collision monitoring of foreign object on cfrp laminate utilizing electrostatic induction
1.
静電誘導を利用した CFRP積層板に対する 異物の衝突モニタリング 東京工業大学 鈴木壯大 鈴木良郎
2.
発表の流れ • 緒言 - 研究背景 -
研究目的 • 理論構築 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 • 実験 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 - CFRPへの適用 • 結言 1
3.
• 緒言 - 研究背景 -
研究目的 • 理論構築 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 • 実験 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 - CFRPへの適用 • 結言 2
4.
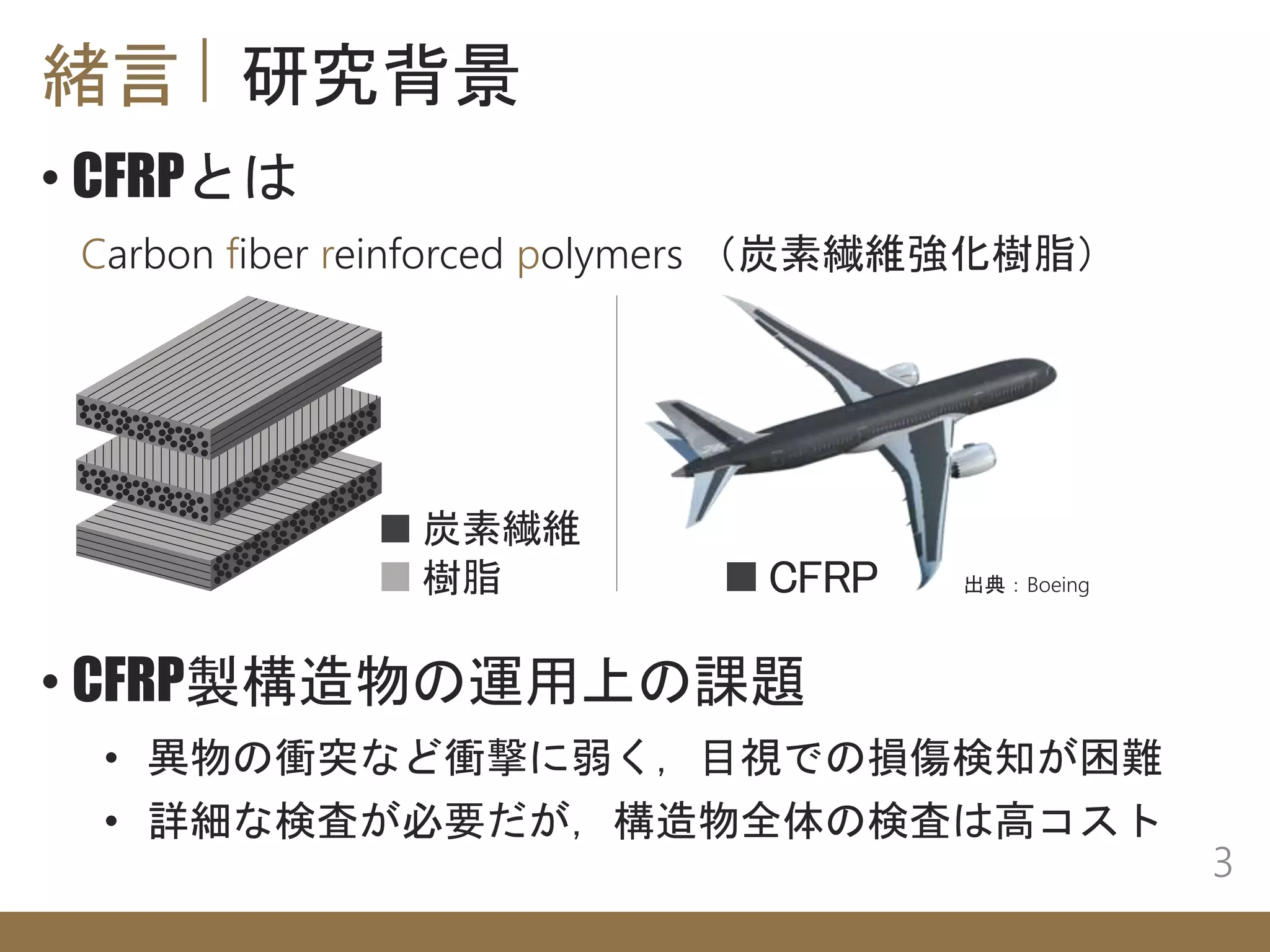
緒言 研究背景 3 • CFRPとは Carbon
fiber reinforced polymers (炭素繊維強化樹脂) 炭素繊維 樹脂 CFRP • CFRP製構造物の運用上の課題 • 異物の衝突など衝撃に弱く,目視での損傷検知が困難 • 詳細な検査が必要だが,構造物全体の検査は高コスト 出典:Boeing
5.
緒言 研究背景 4 • 静電誘導を利用した衝突モニタリングの提案 簡便・安価に検査を要する箇所を特定できれ ば,検査コストを削減できる •
全ての物体は帯電体とみなせる • 静電誘導により,帯電体の衝突位置,角度,速さを同定で きる 注意 • 検査(損傷の評価)手法ではない • 検査を要する箇所を特定する手法
6.
緒言 研究目的 CFRP積層板に対する簡便・安価な 異物の衝突モニタリング手法の開発 5 • 衝突モニタリングの理論構築 •
実験による理論の妥当性の検証 • 本研究の新規性 • 異物の衝突時において静電誘導に着目 • 静電誘導による発生電流の理論式を導出 • 静電誘導を利用した衝突モニタリング手法を提案
7.
• 緒言 - 研究背景 -
研究目的 • 理論構築 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 • 実験 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 - CFRPへの適用 • 結言 6
8.
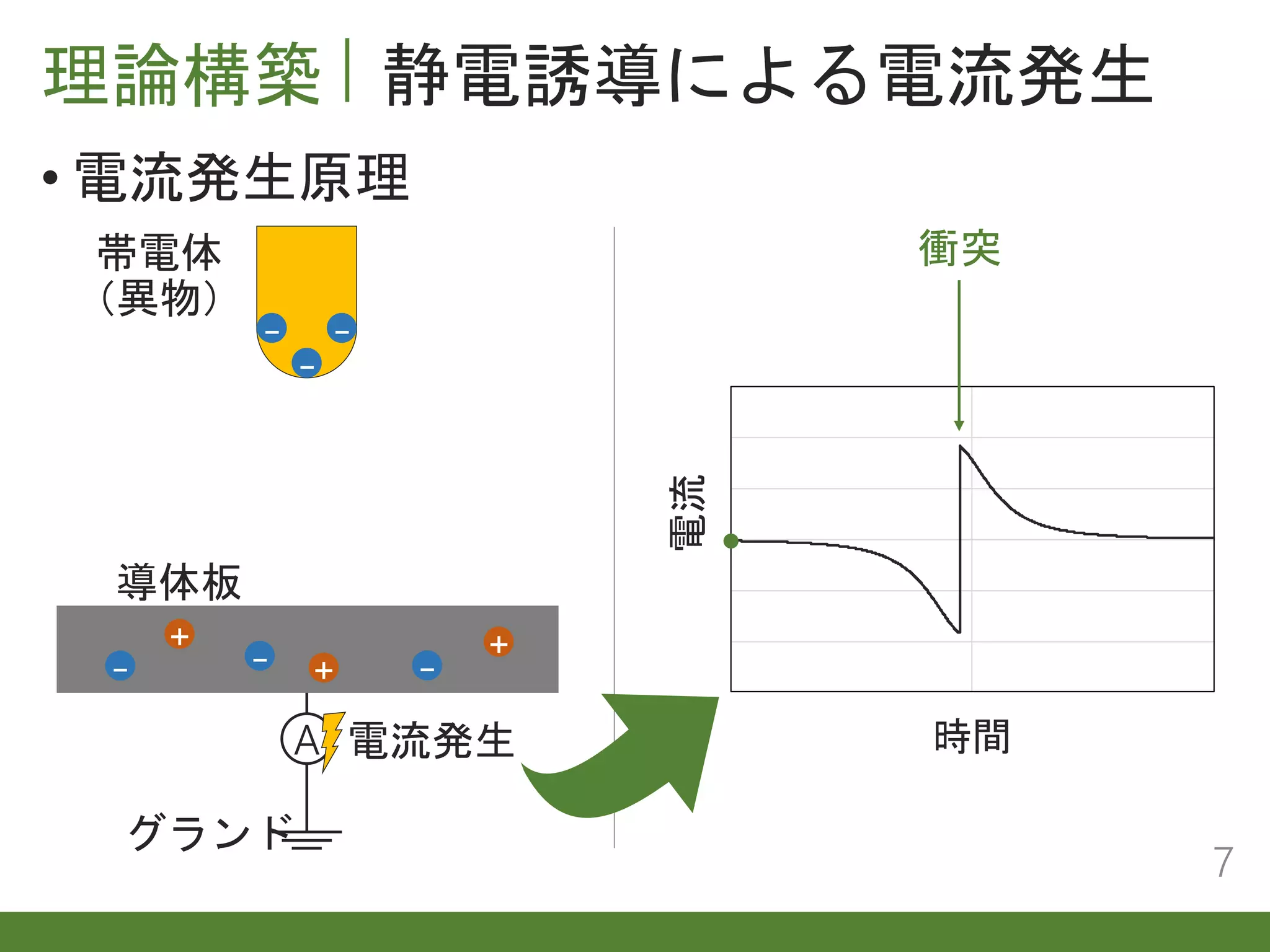
電流 時間 衝突 A 理論構築 静電誘導による電流発生 7 • 電流発生原理 + - -
- + + - -- 帯電体 (異物) 導体板 グランド 電流発生
9.
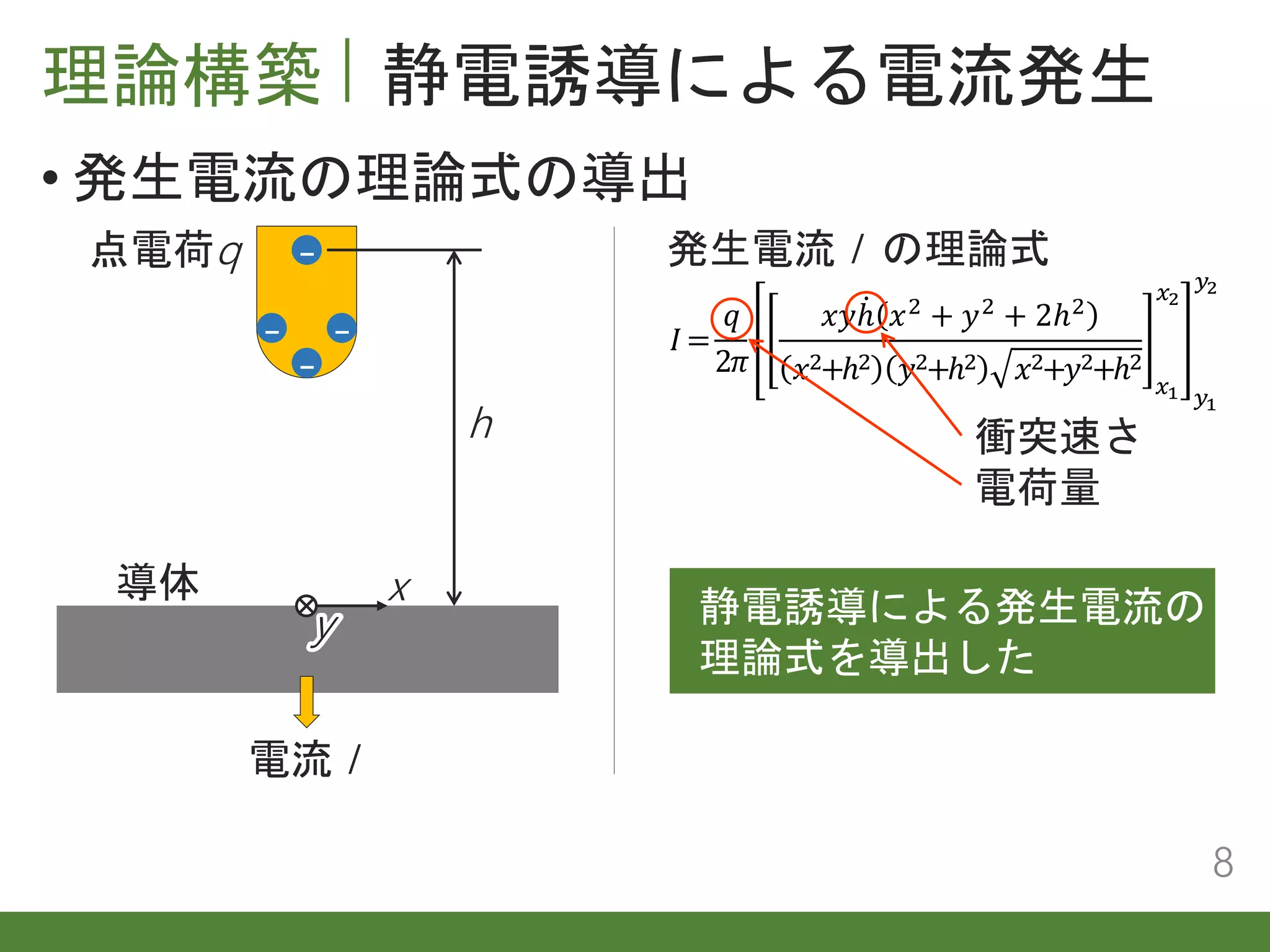
- - - 理論構築 静電誘導による電流発生 8 •
発生電流の理論式の導出 帯電体 導体 点電荷q - 電流 I 𝐼 = 𝑞 2𝜋 𝑥𝑦ℎ 𝑥2 + 𝑦2 + 2ℎ2 𝑥2+ℎ2 𝑦2+ℎ2 𝑥2+𝑦2+ℎ2 𝑥1 𝑥2 𝑦1 𝑦2 静電誘導による発生電流の 理論式を導出した 発生電流 I の理論式 衝突速さ 電荷量 x h y
10.
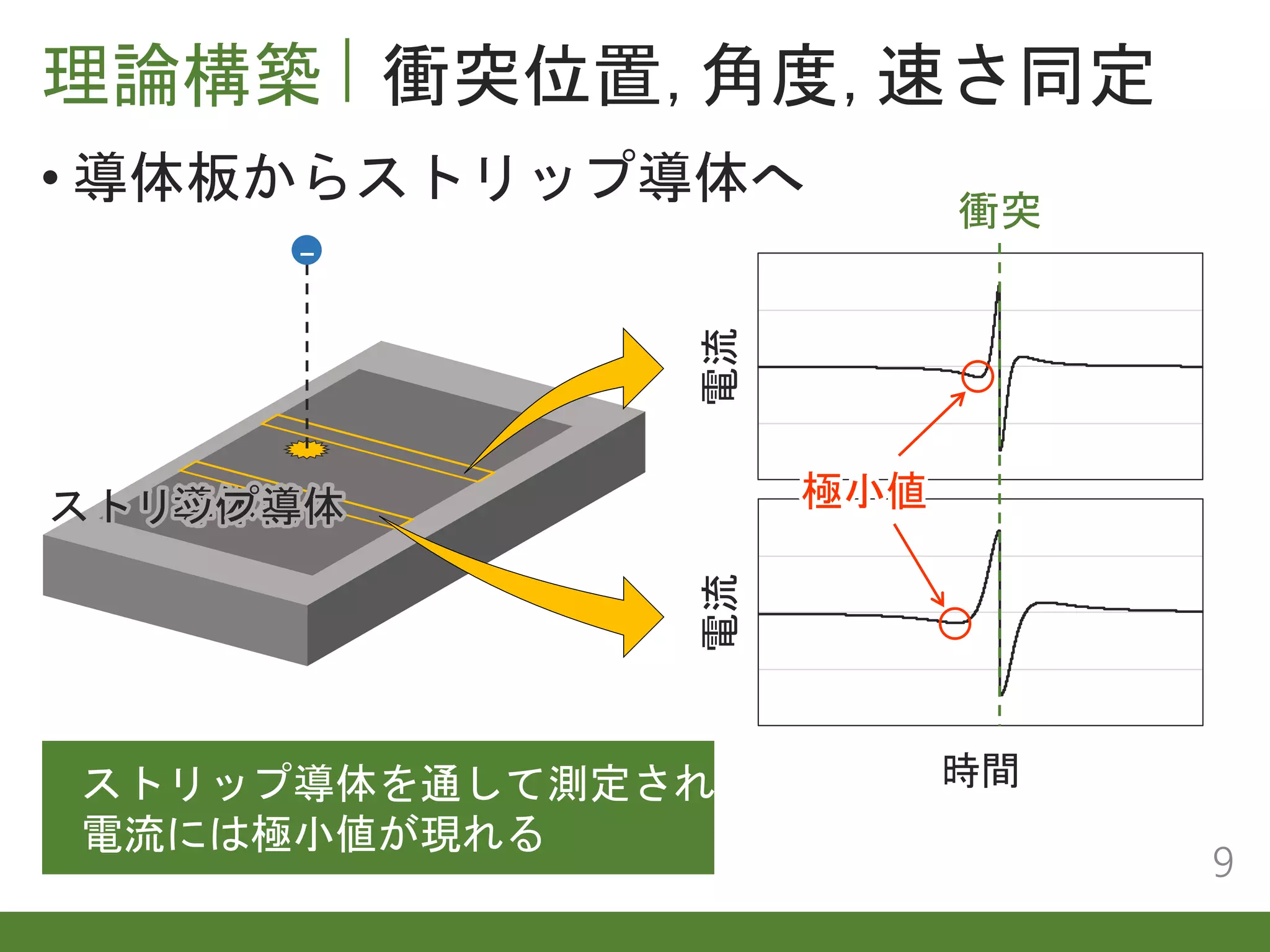
理論構築 衝突位置,角度,速さ同定 • 導体板からストリップ導体へ 9 電流 時間導体板ストリップ導体 電流 時間 電流 時間 極小値 衝突 ストリップ導体を通して測定される 電流には極小値が現れる -
11.
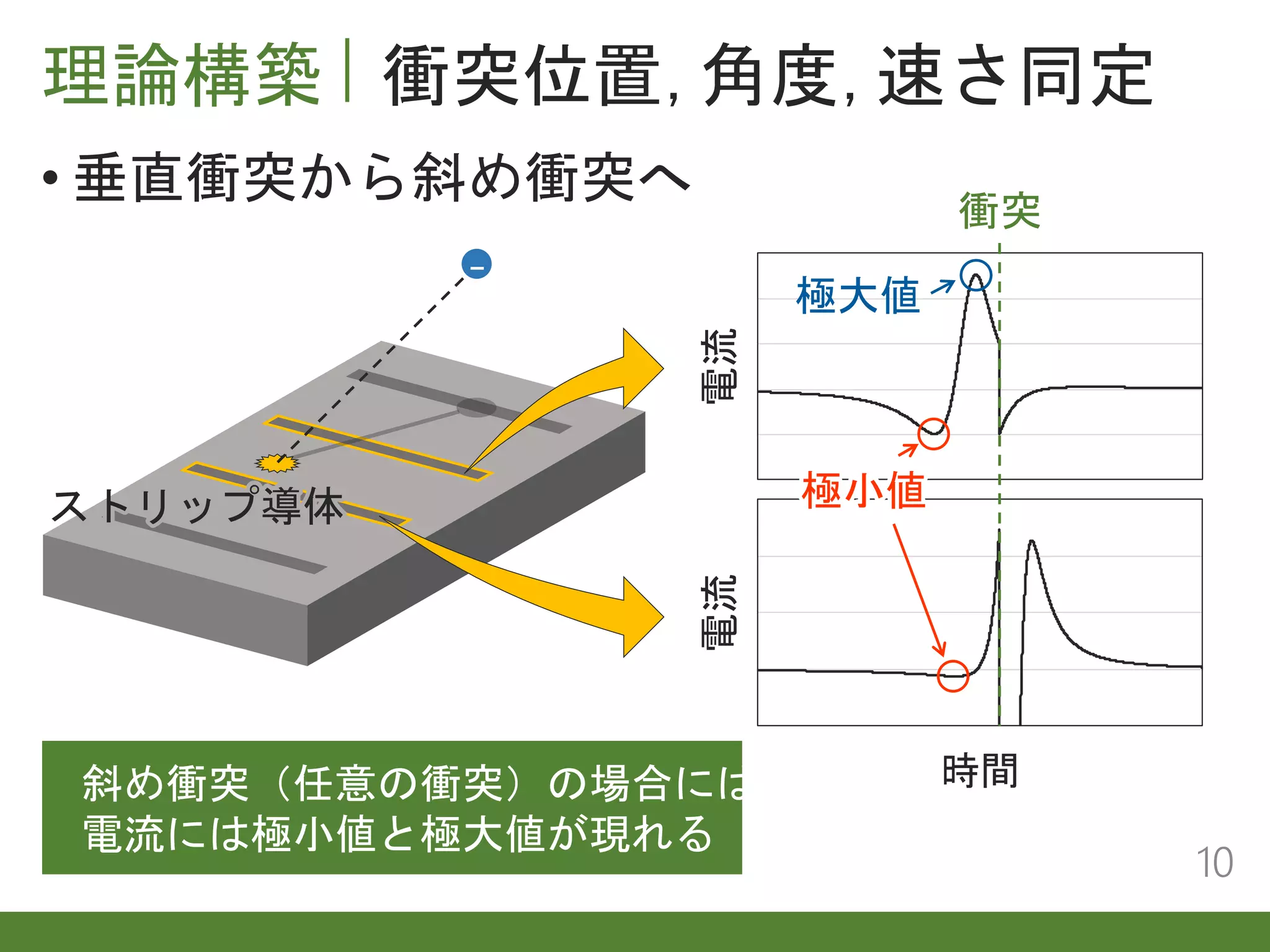
電流 時間 電流 時間 理論構築 衝突位置,角度,速さ同定 10 • 垂直衝突から斜め衝突へ 極大値 斜め衝突(任意の衝突)の場合には 電流には極小値と極大値が現れる 衝突 - ストリップ導体
極小値
12.
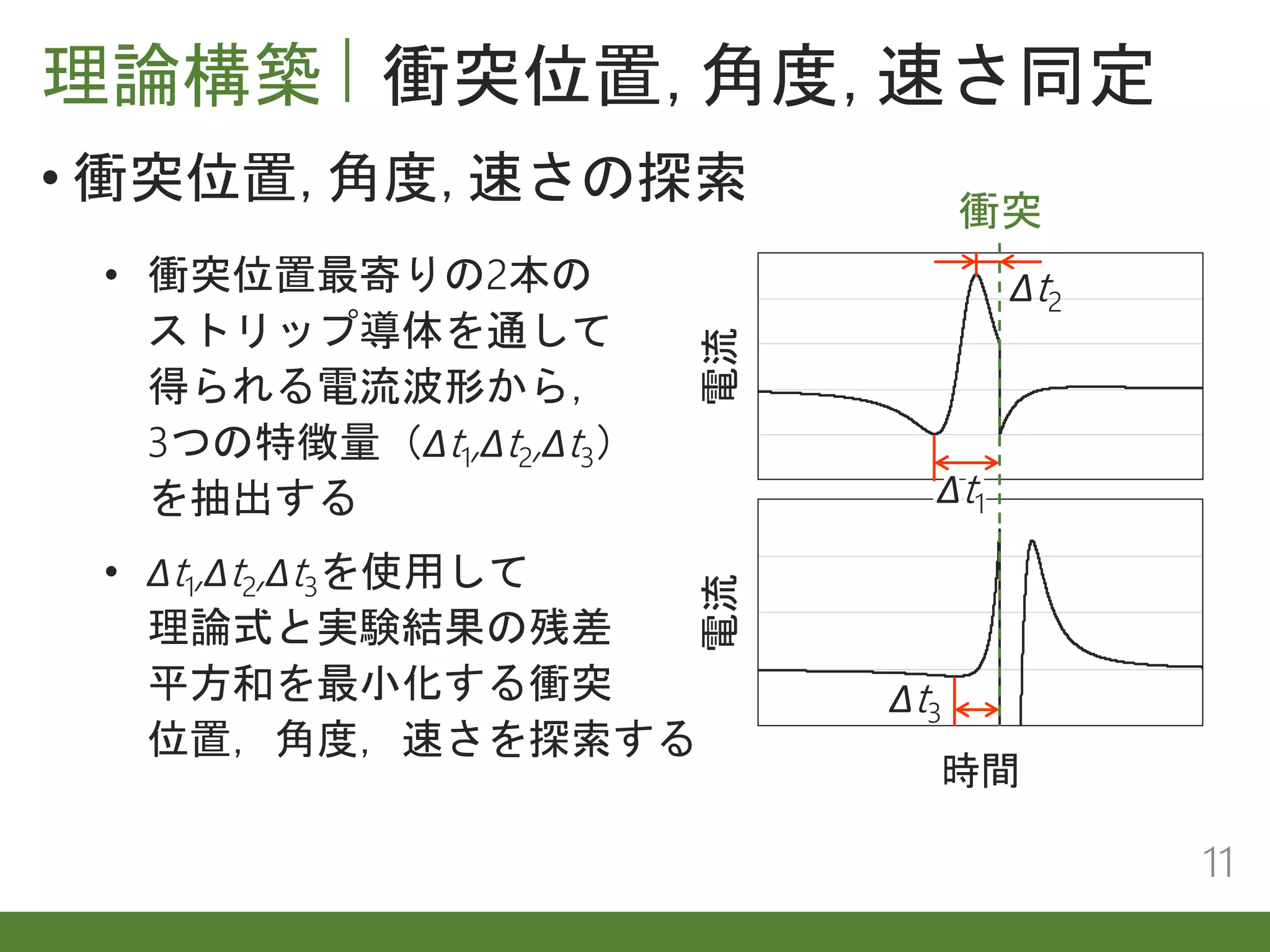
理論構築 衝突位置,角度,速さ同定 11 • 衝突位置,角度,速さの探索 電流 時間 電流 時間 •
衝突位置最寄りの2本の ストリップ導体を通して 得られる電流波形から, 3つの特徴量(Δt1,Δt2,Δt3) を抽出する • Δt1,Δt2,Δt3を使用して 理論式と実験結果の残差 平方和を最小化する衝突 位置,角度,速さを探索する Δt1 Δt2 Δt3 衝突
13.
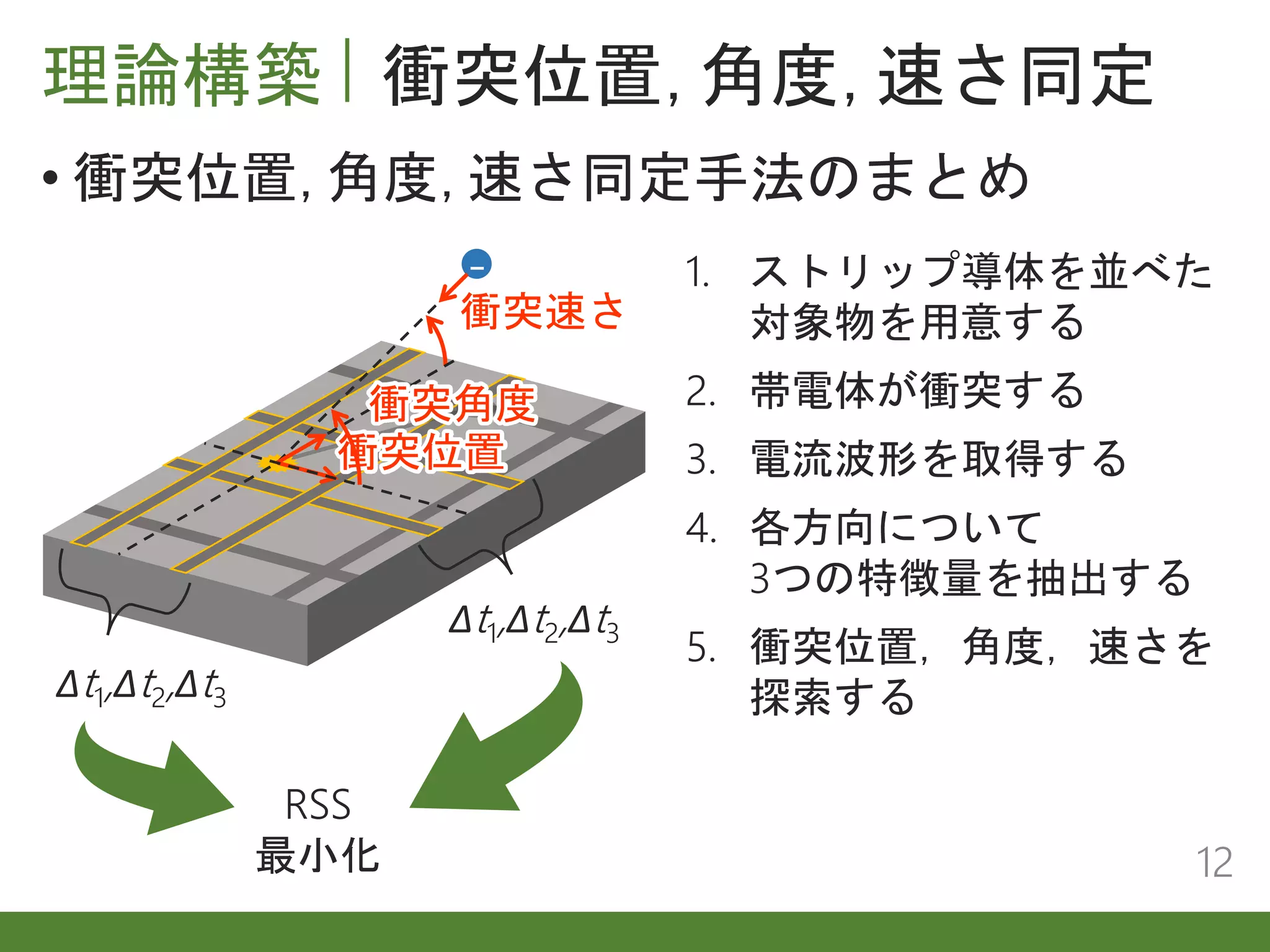
理論構築 衝突位置,角度,速さ同定 12 • 衝突位置,角度,速さ同定手法のまとめ 1.
ストリップ導体を並べた 対象物を用意する 2. 帯電体が衝突する 3. 電流波形を取得する 4. 各方向について 3つの特徴量を抽出する 5. 衝突位置,角度,速さを 探索する Δt1,Δt2,Δt3 Δt1,Δt2,Δt3 RSS 最小化 - 衝突速さ 衝突位置 衝突角度
14.
• 緒言 - 研究背景 -
研究目的 • 理論構築 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 • 実験 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 - CFRPへの適用 • 結言 13
15.
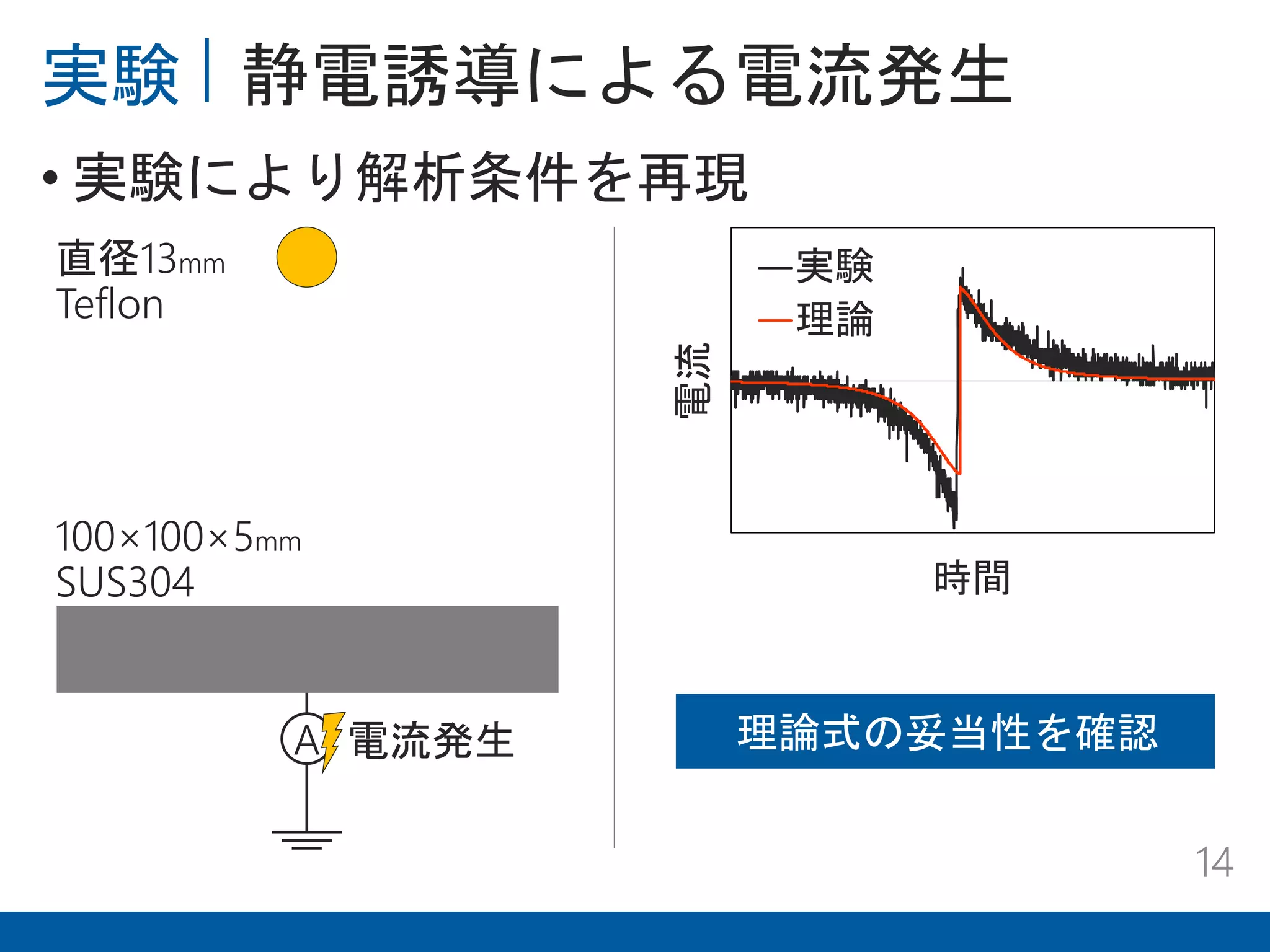
電流 時間 実験 理論 実験 静電誘導による電流発生 14 • 実験により解析条件を再現 A 100×100×5mm SUS304 直径13mm Teflon 理論式の妥当性を確認電流発生
16.
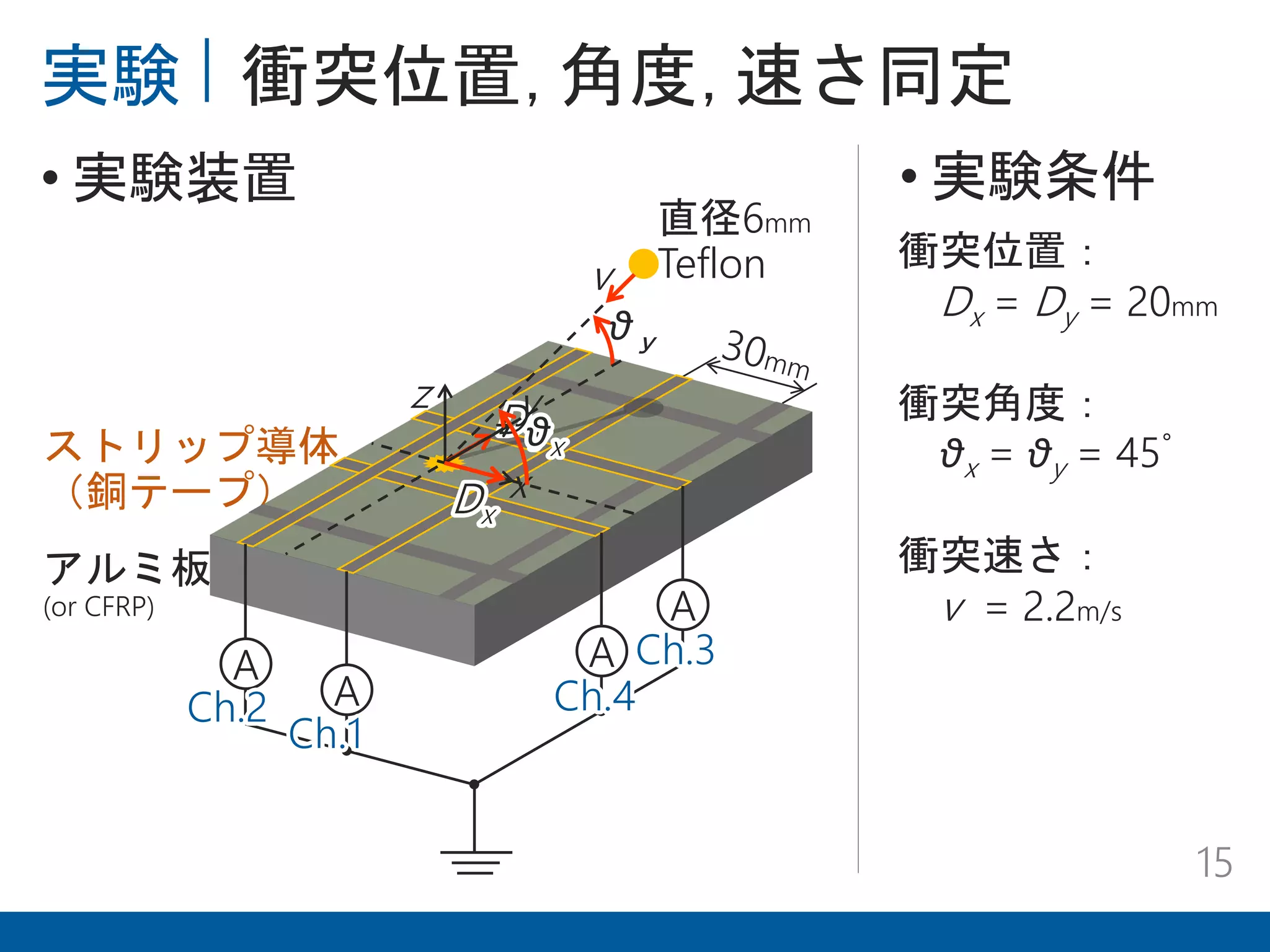
ストリップ導体 (銅テープ) 実験 衝突位置,角度,速さ同定 15 A A A A 直径6mm Teflon Dx Dy v アルミ板 (or
CFRP) 衝突位置: Dx = Dy = 20mm 衝突角度: θx = θy = 45゚ 衝突速さ: v = 2.2m/s • 実験条件 θy θx x yz • 実験装置 Ch.1 Ch.2 Ch.3 Ch.4 Dx θx
17.
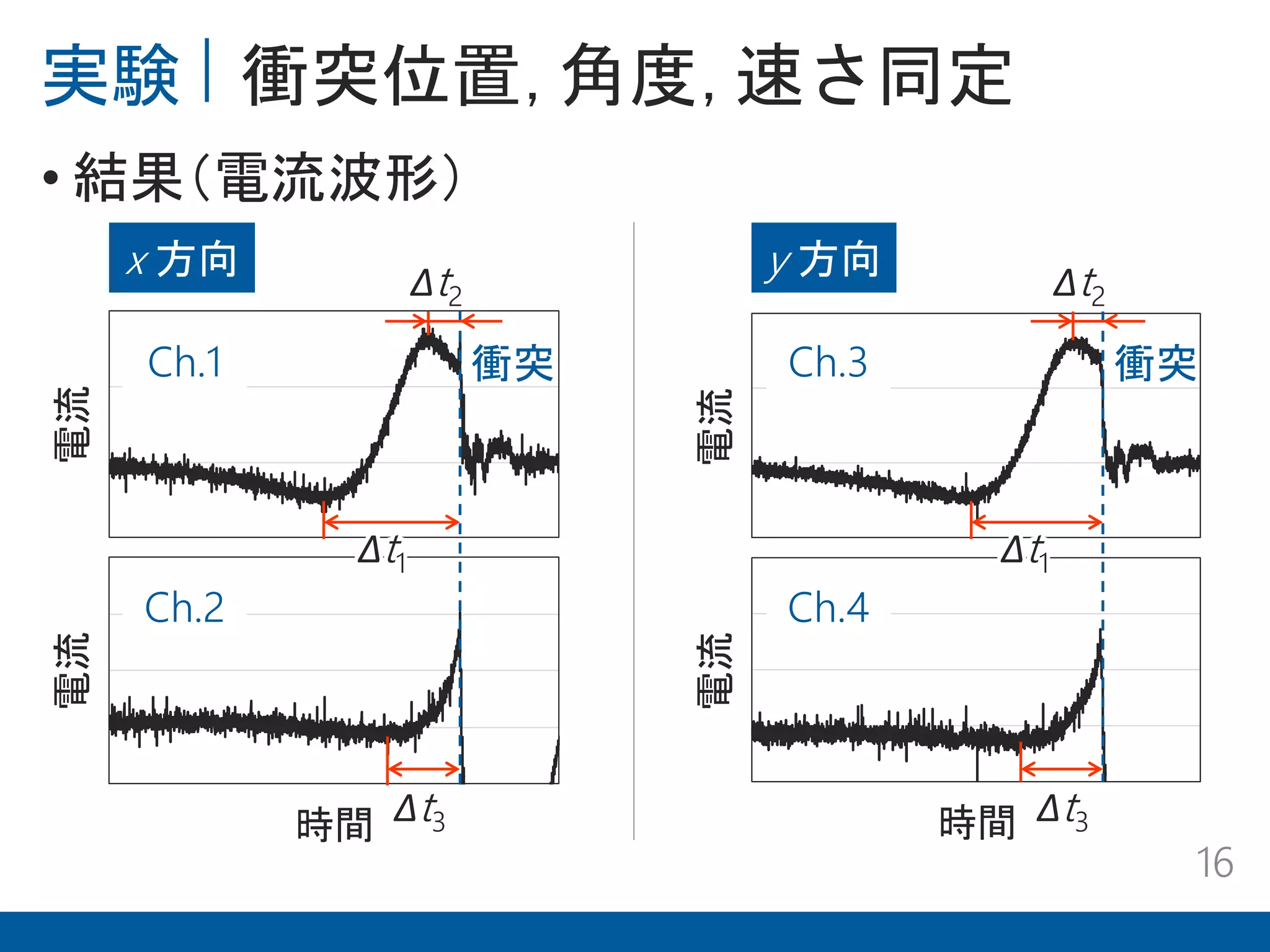
電流 時間 電流 時間 電流 時間 電流 時間 実験 衝突位置,角度,速さ同定 16 • 結果(電流波形) 衝突 Δt1 Δt2 Δt3 Ch.1 Ch.2 Ch.3 Ch.4 衝突 Δt1 Δt2 Δt3 x
方向 y 方向
18.
実験 衝突位置,角度,速さ同定 17 • 結果(同定結果,10回平均) 0 10 20 30 0 30 60 90 0 2 4 衝突位置
[mm] 衝突角度 [゚] 衝突速さ [m/s] 真値 同定結果 Dx Dy θx θy v 良い精度で衝突位置,角度,速さ同定が可能 0 10 20 30 0 30 60 90 0 2 4 1.7% 2.7% 2.9% 2.4% ー <誤差 5%(目標値)
19.
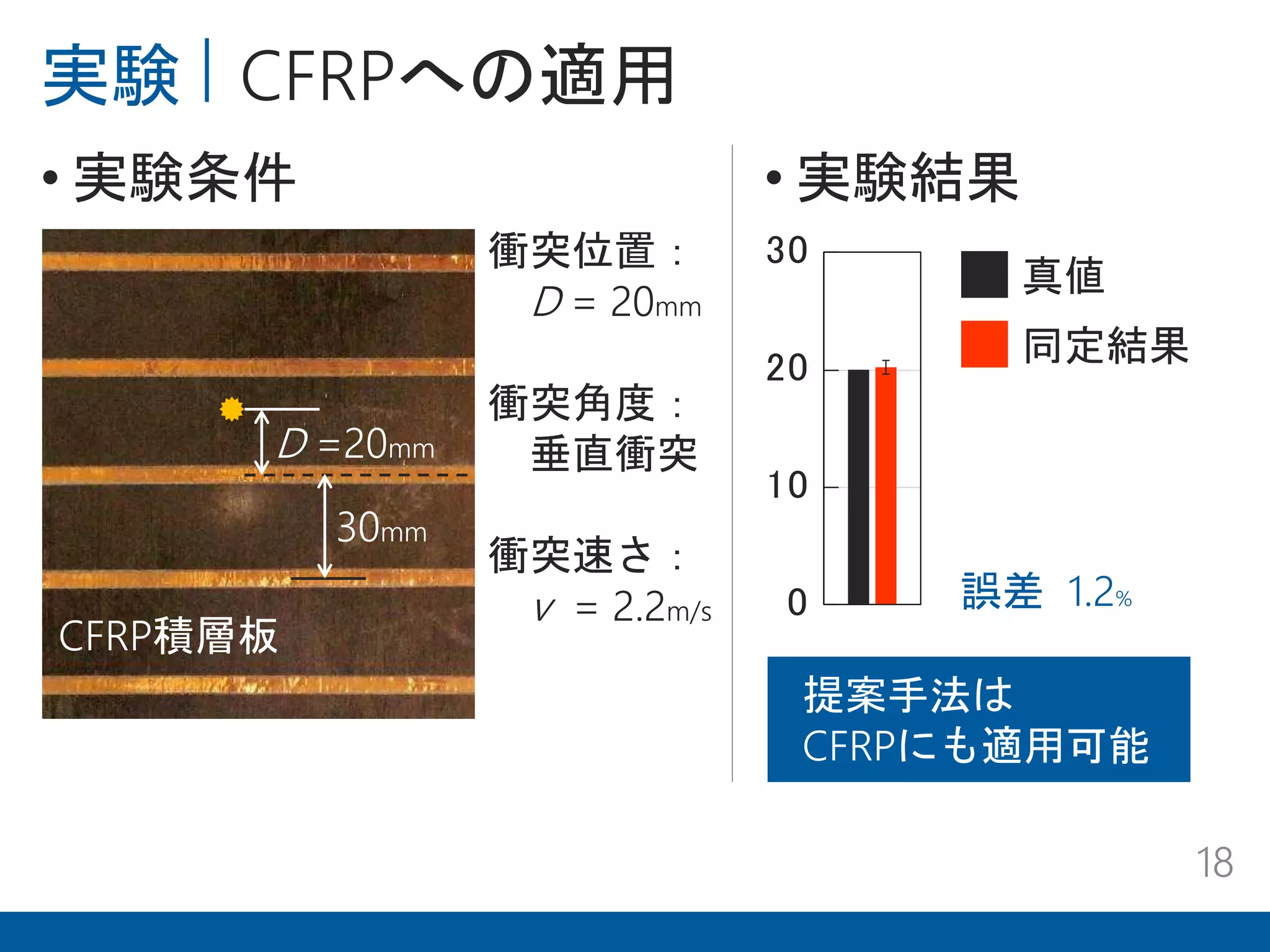
実験 CFRPへの適用 18 30mm 衝突位置: D =
20mm 衝突角度: 垂直衝突 衝突速さ: v = 2.2m/s • 実験条件 • 実験結果 D =20mm CFRP積層板 真値 同定結果 0 10 20 30 0 10 20 30 提案手法は CFRPにも適用可能 誤差 1.2%
20.
• 緒言 - 研究背景 -
研究目的 • 理論構築 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 • 実験 - 静電誘導による電流発生 - 衝突位置,角度,速さ同定 - CFRPへの適用 • 結言 19
21.
結言 20 • 静電誘導による発生電流の理論式を導出し, 実験によりその妥当性を示した • 静電誘導による発生電流を利用して,
CFRP積層板 などに対して異物の衝突位置,角度,速さを同定す る 手法を提案し,実験によりその妥当性を示した
Editor's Notes
#2
「静電誘導を利用した CFRP積層板に対する異物の衝突モニタリング」というタイトルで,轟・水谷研の鈴木が発表します.
#3
発表は,緒言,理論構築,実験,結言の順に進めます.
#4
まず,緒言,研究背景,研究目的から始めます.
#5
CFRPとは,炭素繊維強化樹脂の略です. CFRPは炭素繊維と樹脂から成る複合材料で,一般的にはこのように繊維が一方向に走った薄い層を重ね合わせて,積層板として使用されます. CFRPは軽くて強い材料なので,航空機などの大型構造物にも使用され始めています. しかし,CFRPにも課題はあります. CFRP製構造物の運用上の課題として,CFRPは異物の衝突などの衝撃荷重に弱く,さらにそれにより生じた損傷は目視での損傷検知が困難という問題があります. 安全な運用のためには定期的に詳細な検査が必要となりますが,大型構造物,例えば航空機全体の検査となると大きなコストがかかります.
#6
そこで,簡便・安価に検査を要する箇所を特定できれば,検査範囲が大幅に狭まり,検査コストを削減できます. 検査を要する箇所の特定のため,静電誘導を利用した衝突モニタリングを提案します. まず,タイトルでは異物と呼んでいましたが,全ての物体は帯電しているため,帯電体とみなせます. 帯電体の衝突時に発生する静電誘導を利用することで,帯電体の衝突位置,角度,速さを同定できます. 衝突位置,角度,速さが同定できれば,衝突の位置や規模,原因が推定できますので,上で述べた,検査を要する箇所の特定ができます. ここで注意していただきたいのが,本研究で目指すところは,検査,つまり損傷の評価をする手法ではないということです. 目指すところは検査を要する箇所を特定する手法であり,検査の前段階,という位置づけとなっています.
#7
以上を踏まえ,本研究の目的を「CFRP積層板に対する簡便・安価な異物の衝突モニタリング手法の開発」と設定します. 達成すべき小目的といたしまして,次の2点を挙げます. まず,衝突モニタリングの理論構築をします. 次に,実験により理論の妥当性を検証します. 本研究の新規性は次の3点です. まず,そもそも異物の衝突時において静電誘導に着目した点です. 次に,このときの静電誘導による発生電流の理論式を導出した点です. 最後に,この静電誘導による発生電流を利用した衝突モニタリング手法を提案した点です.
#8
それでは,理論構築,静電誘導による電流発生,衝突位置,角度,速さ同定に移ります.
#9
まず,静電誘導による電流発生原理について説明します. 先ほど申し上げましたように,衝突する異物を負に帯電していると仮定し,帯電体と呼びます. また,衝突モニタリング対象である導体板があり,この導体板は電気的に中性で,正電荷と負電荷がつりあっています. この導体板をグランドにつなげ,間に電流計を挟んでおきます. この導体板に帯電体が衝突します. そうしますと,導体板の正電荷は帯電体に引き寄せられ,一方で負電荷はグランドに流れ込みます. この電荷の移動が電流計で電流として測定され,このときに測定される電流波形は右図のようになります. ここが衝突の瞬間で,これ以降は跳ね返ったあととなっています.
#10
この発生電流の理論式を導出します. 帯電体を,電荷量qの点電荷に置き換えます. このとき,x軸,y軸をこのように定義し,点電荷の高さをhとします. ここで,点電荷の高さをhは時間の関数です. 前のスライドと同様に,点電荷が衝突し,電流Iが発生します. この発生電流Iの理論式を導出し,こちらの式のようになりました. このように,衝突速さhドットと電荷量qに比例した式になっています. このようにして,静電誘導による発生電流の理論式を導出しました.
#11
次に,衝突モニタリングの核となる,衝突位置,角度,速さ同定手法の説明に移ります. これまでは,このように,導体板に対して点電荷が衝突する場合を考えていました. その場合の発生電流はこのような感じでした. これを,今度は細長いストリップ導体とし,並べます. このとき,ストリップ導体を通して測定される電流は,異なる見た目の波形が得られます. 衝突位置から最も近い2本のストリップ導体に注目すると,こちらのストリップ導体を通して測定される電流が上の波形,こちらのストリップ導体を通して測定される電流が下の波形となります. このように,衝突位置とストリップ導体の位置関係によって異なる波形が得られます. また,ここで注目していただきたいのが,ストリップ導体を通して測定される電流には,極小値が現れるということです. このように,極小値が現れています. これが,衝突位置,角度,速さ同定に重要となってきます.
#12
先ほどのスライドでは,点電荷が垂直衝突する場合を考えていました. しかしこれでは,現実における任意の衝突を扱うことには不十分です. なぜなら,点電荷は垂直ではなく,斜めに衝突する場合もあるからです. そこで,さらに任意の位置に任意の角度で衝突するような,「斜め衝突」の場合を考えます. このとき,衝突位置から最も近い2本のストリップ導体に注目すると,こちらのストリップ導体を通して測定される電流が上の波形,こちらのストリップ導体を通して測定される電流が下の波形となります. このように,衝突位置や衝突角度と,ストリップ導体との関係によって異なる波形が得られます. ここで注目していただきたいのが,斜め衝突のとき,ストリップ導体を通して測定される電流には,極小値に加え,極大値が現れるということです. このように,極小値に加え,極大値が現れています. これもまた,衝突位置,角度,速さ同定に重要となってきます.
#13
そして,衝突位置,角度,速さを探索します. まず発表の前半で,静電誘導による発生電流の理論式が導出されました, そのため,逆に実験結果である電流波形から,逆問題により真値である衝突位置,角度,速さを求めることができます. 具体的には,まず衝突位置から最も近い2本のストリップ導体を通して得られる電流から,3つの特徴量,Δt1,Δt2,Δt3,を抽出します. 各種Δtは,先ほど説明した極小値や極大値を示す時間の情報で,衝突の瞬間から極値までの時間をそれぞれΔt1,Δt2,Δt3とします. 次に,各種Δtを使用して,理論式と実験結果の残差平方和を最小化するような衝突位置,角度,速さを探索します. つまり,実験結果のΔt1,Δt2,Δt3を入力すると,衝突位置,角度,速さの同定結果が出力されます.
#14
衝突位置,角度,速さ同定手法の手順をまとめます. まず,先ほどまでの説明では簡単のため,ストリップ導体は一方向にのみ並べられていました. しかし,それでは一方向に関する衝突位置,角度,速さしか分からないため,衝突モニタリング対象物にストリップ導体は二方向,格子状に並べます. 次に,この対象物に帯電体が衝突します. そのとき,各方向について,衝突位置から最も近い2本のストリップ導体を通して測定される電流波形を取得します. 次に,各方向について,前のスライドで説明した3つの特徴量,Δt1,Δt2,Δt3を抽出します. 最後に,Δt1,Δt2,Δt3を入力として,衝突位置,角度,速さを,残差平方和の最小化により探索します. なお,衝突位置の定義は,このようにあるストリップ導体からの距離となっています. また,衝突角度の定義は,このようになっています. さらに,衝突速さの定義は,このようになっています. 理論についての説明は以上です.
#15
それでは,実験,静電誘導による電流発生,衝突位置,角度,速さ同定,CFRPへの適用,に移ります. ここでは,理論構築した事柄を実験により確認し,またCFRPへの適用可能性を検討します.
#16
まず,最初に説明した,帯電体が導体板に衝突する際の発生電流を実験により再現します. 寸法が一辺100mmの正方形,厚さ5mmのSUS304製導体板を電流計を介してグランドに接続します. これに直径が13mmのテフロンボールをこのように衝突させます. このとき,電流計では電流が測定され,このときの発生電流はこの黒線のようになります. 赤線は発表の前半で導出した,理論式による電流波形です. この図から分かる通り,実験結果と理論式は良い一致を示し,提案した理論式の妥当性を確認できました.
#17
次に,衝突位置,角度,速さ同定手法を実験により再現します. まず,衝突モニタリング対象としてアルミ板を設置します. これはタイトルにもあるように,CFRPでも問題ありません. この上に,アルミ板とは絶縁して,ストリップ導体として銅テープを30mm間隔で格子上に並べます. これに,直径6mmのテフロンボールを衝突させます. このときの衝突位置,角度,速さを同定します. はじめに,アルミ板の上に直交座標系を定義します. 理論のところで説明したものと同様に,衝突位置の定義は,このように,Dx,Dyとなっています. また,衝突角度の定義は,同様に,θx,θyとなっています. さらに,衝突速さの定義は,こうです. ここで理解していただきたいのは,これにより等速直線運動をする帯電体の衝突が一意に決まるということです. なお,実験は何パターンか行っていますが,今回の発表で説明するのは,衝突位置Dx,Dyが20mm,衝突角度θx,θyが45度,衝突速さvが2.2m/sという,x軸,y軸に関して対称な条件で行った実験です. このときに発生する電流を,ストリップ導体を電流計につなげ,測定します. こちらの電流計で測定された電流をチャンネル1,こちらをチャンネル2,こちらをチャンネル3,チャンネル4として,次のスライドで示します.
#18
こちらが,実験結果の電流波形です. 左がx軸方向であるチャンネル1,2,右がy軸方向であるチャンネル3,4となっています. なお,先ほど説明したように,x軸,y軸に関して対称な条件で実験を行っていますので,左側と右側はほとんど同じ電流波形が得られています. ここから,それぞれの方向について3つの特徴量,Δt1,Δt2,Δt3を抽出し,衝突位置,角度,速さを探索します.
#19
同定結果です. 実験は10回行ったので,その平均値を載せています. 左から衝突位置,衝突角度,衝突速さのグラフで,黒が真値,赤が同定結果となっています. 誤差の目標値は5%として研究を進めていましたが,真値との誤差は,それぞれのフルスケールと比較して,このようになっています. 衝突速さはフルスケールが存在しないので,%表記はできませんが,衝突位置,角度については,目標値と比較して,小さい値となっています. これより,良い精度で衝突位置,角度,速さ同定が可能であると結論付けます.
#20
最後に,アルミ板ではなくCFRP積層板に対しても類似の実験を行ったので,それについて説明します. この実験は提案手法がCFRPにも適用可能であることを確認するために行ったので,シンプルな実験条件となっています. 他の様々なパターンについては,試験片の作製が容易なアルミ板を使って実験を行っています. CFRP積層板の表面に,同様に30mm間隔で銅テープを並べました. そして,このD=20mmの位置に垂直衝突で実験を行いました. この衝突の実験結果はこちらです. 真値と同定結果の平均は誤差1.2%とよく一致しており,これより提案手法はCFRPにも適用可能と結論付けます.
#21
最後に,結言です.
#22
静電誘導による発生電流の理論式を導出し,実験によりその妥当性を示しました. また,静電誘導による発生電流を利用して,CFRP積層板などに対して異物の衝突位置,角度,速さを同定する手法を提案し,実験によりその妥当性をしました. 発表は以上になります. ご清聴ありがとうございました.
Download

![実験 衝突位置,角度,速さ同定
17
• 結果(同定結果,10回平均)
0
10
20
30
0
30
60
90
0
2
4
衝突位置 [mm] 衝突角度 [゚] 衝突速さ [m/s]
真値
同定結果
Dx Dy θx θy v
良い精度で衝突位置,角度,速さ同定が可能
0
10
20
30
0
30
60
90
0
2
4
1.7% 2.7% 2.9% 2.4% ー <誤差 5%(目標値)](https://image.slidesharecdn.com/collisionmonitoringofforeignobjectoncfrplaminateutilizingelectrostaticinduction-181207050752/75/Collision-monitoring-of-foreign-object-on-cfrp-laminate-utilizing-electrostatic-induction-18-2048.jpg)