1. 6
5
32
Introduction1
Departmentof Neurology,Universityof MichiganMedical School,AnnArbor,MI
Titus John, Damien Ellens, Matt Gaidica, Sophia Peng, Daniel Leventhal
Evolution of limb kinematics during fine motor skill acquisition in rats
Methods
Multiple neural systems, including the basal ganglia, cerebellum, and corticospinal tracts, interact to acquire and consolidate
motor skills. Furthermore, many Movement Disorders (e.g., Parkinson Disease) impair motor skill acquisition and performance.
To better study how motor skills are consolidated, we developed an automated rat skilled reaching apparatus. It improves
on the well-developed and robust rat skilled reaching task by allowing unsupervised task performance and 3-D reconstruction of
reach trajectories. As a first step towards using this task to understand motor learning, here we describe changes in rat fore-
limb kinematics as the skilled reaching task is acquired.
Trajectory-Reconstruction
Hypotheses
1. Successful and failed reaches will converge on similar reach trajectories as success rate improves.
2. Variability in failed reaches will decrease as reach success improves.
Future Goals
Individual reaches were recorded at 300 Hz.
Paws painted with green nail polish to allow automated
motion tracking.
Trained for at least 14 days (100 trials/session,
1 session/day).
Digits were manually marked every 8 frames over a 40
frame interval after the paw passed through the slot on
days 3, 5, and 7.
References
Acknowledgements : Parkinson Disease Foundation STA- 1592,
Brain Research Foundation, NIH NINDS K08-NS072183
Hartley R., A. Zisserman, Multiple View Geometry in
Computer Vision. 2003 Cambridge University Press
Klein A, Sacrey LA, Whishaw IQ, Dunnett SB. The use of
rodent skilled reaching as a translational model for
investigating brain damage and disease. Neurosci
Biobehav Rev. 2012 Mar
Example of paw marking process. Shown
above are the left, center, and right prespective of a
manually marked paw.
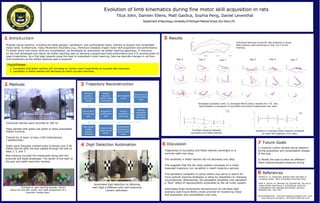
Results
Day 3 Day 5 Day 7 Day 3 Day 5 Day 7
Euclidian distance between
successful and failed reaches.
8
7Discussion
Individual learning curves for rats analyzed in study.
Rats reaches were examined on Day 3,5,7 of the
training.
Variance in indivdaul failed reaches compared
to mean fail trajectory over days.
Averaged successful (red) vs. averaged failure (blue) reaches for n=6 rats.
Demonstates convergence of successful and failure trajectories over days.
7
6.5
Lateral (mm)
6
5.5
5
4.5
4187
188
Anterior/Posterior (mm)
189
190
191
192
193
9
8
7
5
4
3
6
2
Dorsal/Ventral(mm)
12
10
Lateral (mm)
8
6
4174
176
Anterior/Posterior (mm)
178
180
182
184
186
3
4
5
6
7
8
1
2
Dorsal/Ventral(mm)
10
9
Lateral (mm)
8
7
6
5
4178
Anterior/Posterior (mm)
180
182
184
186
188
6
4
2
0
8
-5
Lateral (mm)
-10
-15
-20172
174
Anterior/Posterior (mm)
176
178
180
182
184
186
3
3.5
4
4.5
5
5.5
6
6.5
2.5
Dorsal/Ventral(mm)
0
Lateral (mm)
-5
-10
-15
184
186
Anterior/Posterior (mm)
188
190
192
194
8
7
6
5
4
3
2
Dorsal/Ventral(mm)
Lateral (mm)
0
-5
-10
-15
184186
Anterior/Posterior (mm)
188190192194196
3.5
3
5
2.5
2
1.5
1
5.5
6
4.5
4
Dorsal/Ventral(mm)
-4
-6
Lateral (mm)
-8
-10
-12174
176
Anterior/Posterior (mm)
178
180
182
184
186
8
6
4
2
Dorsal/Ventral(mm)
-1
-2
-3
Lateral (mm)
-4
-5
-6180
Anterior/Posterior (mm)
185
190
10
5
0
195
Dorsal/Ventral(mm)
4
2
Lateral (mm)
0
-2
-4188
Anterior/Posterior (mm)
190
192
194
196
10
5
0
198
Dorsal/Ventral(mm)
0
-1
Lateral (mm)
-2
-3
-4178
Anterior/Posterior (mm)
180
182
184
186
0
15
10
5
188
Dorsal/Ventral(mm)
-4
Lateral (mm)
-5
-6
-7
-8166
168
Anterior/Posterior (mm)
170
172
174
176
8
4
2
0
6
Dorsal/Ventral(mm)
-5.5
-6
-6.5
Lateral (mm)
-7
-7.5
-8174
Anterior/Posterior (mm)
176
178
180
182
8
4
2
0
6
184
Dorsal/Ventral(mm)
-2
-4
Lateral (mm)
-6
-8
-10
-12
-14168
170
Anterior/Posterior (mm)
172
174
176
178
180
182
25
20
15
10
5
Dorsal/Ventral(mm)
0
Lateral (mm)
-5
-10
-15165
Anterior/Posterior (mm)
170
175
180
22
16
14
18
12
10
8
20
Dorsal/Ventral(mm)
2
Lateral (mm)
0
-2
-4
-6
-8176
178
Anterior/Posterior (mm)
180
182
184
186
188
22
20
16
14
12
18
10
Dorsal/Ventral(mm)
4
Automated digit detection by tattooing
each digit a different color and improving
camera calibration.
Digit Detection Automation
acquisition
acquisition
1) Examine cortico-striatal neural patterns
during acquisition and consolidation phases
of the task.
2) Modify the task to allow for different
reach trajectories/perturbations during
Paw marking included the metacarpel along with the
proximal and distal phalanges. The center of the back of
the paw and pellet were also marked.
Trajectories of successful and failed reaches converged on a
common path over days.
The variability in failed reaches did not decrease over days.
This suggests that the rat motor system converges on a mean
rewarded trajectory, but variability in reach trajectory persists.
This persistent variability on some reahes may serve to search for
more optimal reaching strategies or allow for adaptation to changing
circumstances. Alternatively, the persistent variability may represent
a “floor” effect of reproducibility achievable by the rat motor system.
Automated three dimensional reconstruction of individual digit
positions (see Future Work) shows promise for monitoring motor
skill acquisition and consolidation over time.