More Related Content

DOCX
Ecuación diferencial parcial parabólica, método explícito usando fortan 90 ,m... 
PDF

PDF

PDF
"ARKit в приложении Афиша Рестораны”, Меджлумян Самвел, Антышев Дмитрий, Ramb... 
DOCX
latihan Analisis Numerik dengan metode secant 
PDF

PDF

KEY
Featured

PDF
2024 Trend Updates: What Really Works In SEO & Content Marketing 
PDF
Storytelling For The Web: Integrate Storytelling in your Design Process 
PDF
Artificial Intelligence, Data and Competition – SCHREPEL – June 2024 OECD dis... 
PDF
How to Leverage AI to Boost Employee Wellness - Lydia Di Francesco - SocialHR... 
PDF
2024 State of Marketing Report – by Hubspot 
PDF
Everything You Need To Know About ChatGPT 
PDF
Product Design Trends in 2024 | Teenage Engineerings 
PDF
How Race, Age and Gender Shape Attitudes Towards Mental Health 
PDF
AI Trends in Creative Operations 2024 by Artwork Flow.pdf 
PDF

PDF
PEPSICO Presentation to CAGNY Conference Feb 2024 
PDF
Content Methodology: A Best Practices Report (Webinar) 
PPTX
How to Prepare For a Successful Job Search for 2024 
PDF
Social Media Marketing Trends 2024 // The Global Indie Insights 
PDF
Trends In Paid Search: Navigating The Digital Landscape In 2024 
PDF
5 Public speaking tips from TED - Visualized summary 
PDF
ChatGPT and the Future of Work - Clark Boyd 
PDF
Getting into the tech field. what next 
PDF
Google's Just Not That Into You: Understanding Core Updates & Search Intent 
PDF
How to have difficult conversations Arduino example
- 1.
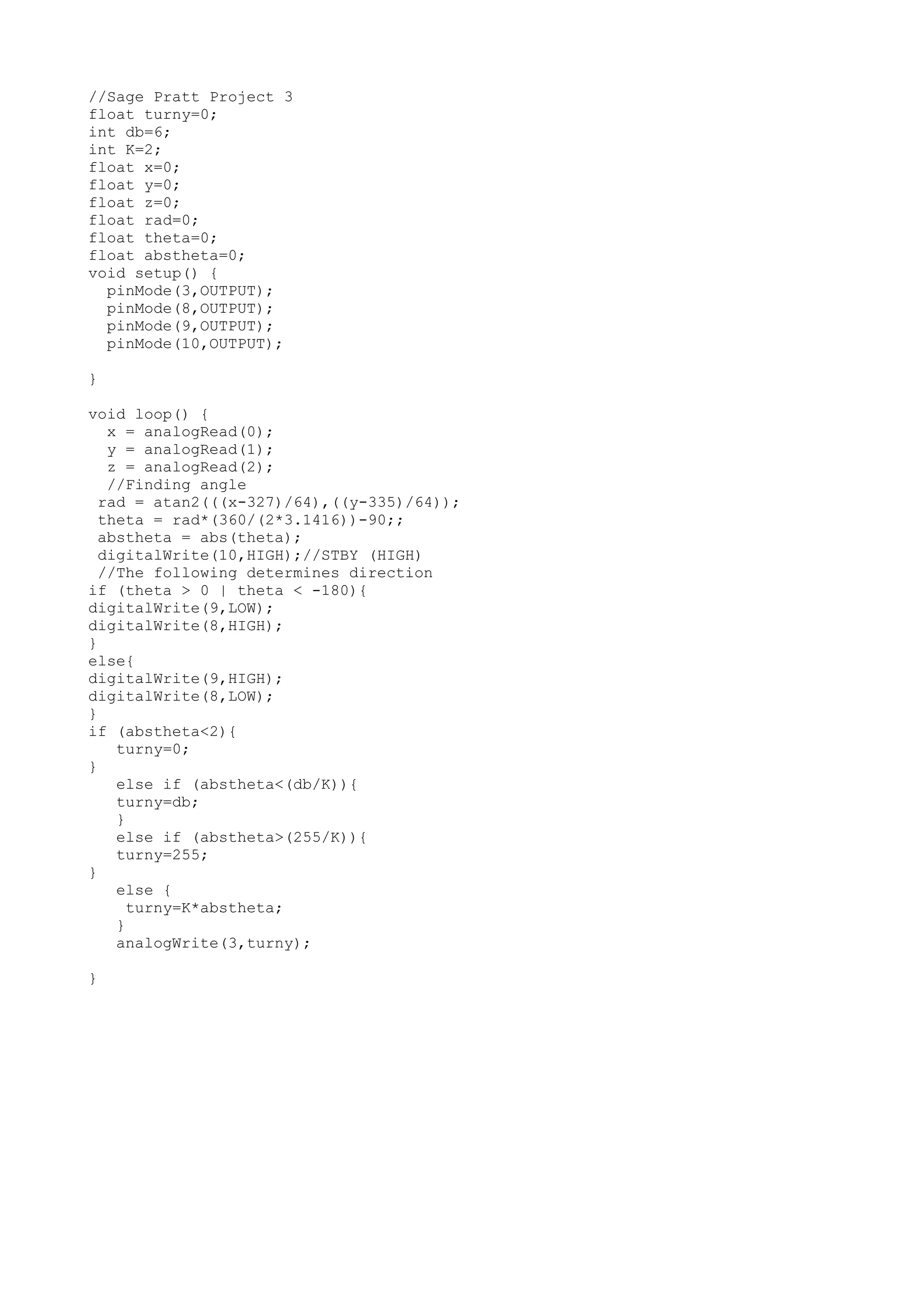
//Sage Pratt Project3
float turny=0;
int db=6;
int K=2;
float x=0;
float y=0;
float z=0;
float rad=0;
float theta=0;
float abstheta=0;
void setup() {
pinMode(3,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
}
void loop() {
x = analogRead(0);
y = analogRead(1);
z = analogRead(2);
//Finding angle
rad = atan2(((x-327)/64),((y-335)/64));
theta = rad*(360/(2*3.1416))-90;;
abstheta = abs(theta);
digitalWrite(10,HIGH);//STBY (HIGH)
//The following determines direction
if (theta > 0 | theta < -180){
digitalWrite(9,LOW);
digitalWrite(8,HIGH);
}
else{
digitalWrite(9,HIGH);
digitalWrite(8,LOW);
}
if (abstheta<2){
turny=0;
}
else if (abstheta<(db/K)){
turny=db;
}
else if (abstheta>(255/K)){
turny=255;
}
else {
turny=K*abstheta;
}
analogWrite(3,turny);
}