11Copyright © 2012, Elsevier Inc. All Rights Reserved.docx
11 Copyright © 2012, Elsevier Inc. All Rights Reserved Chapter 1 Introduction Cyber Attacks Protecting National Infrastructure, 1st ed. 2 • National infrastructure – Refers to the complex, underlying delivery and support systems for all large-scale services considered absolutely essential to a nation • Conventional approach to cyber security not enough • New approach needed – Combining best elements of existing security techniques with challenges that face complex, large-scale national services Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Introduction 3 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Fig. 1.1 – National infrastructure cyber and physical attacks 4 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Fig. 1.2 – Differences between small- and large-scale cyber security 5 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n• Three types of malicious adversaries – External adversary – Internal adversary – Supplier adversary National Cyber Threats, Vulnerabilities, and Attacks 6 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Fig. 1.3 – Adversaries and exploitation points in national infrastructure 7 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n• Three exploitation points – Remote access – System administration and normal usage – Supply chain National Cyber Threats, Vulnerabilities, and Attacks 8 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n• Infrastructure threatened by most common security concerns: – Confidentiality – Integrity – Availability – Theft National Cyber Threats, Vulnerabilities, and Attacks 9 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Botnet Threat • What is a botnet attack? – The remote collection of compromised end-user machines (usually broadband-connected PCs) is used to attack a target. – Sources of attack are scattered and difficult to identify – Five entities that comprise botnet attack: botnet operator, botnet controller, collection of bots, botnot software drop, botnet target 10 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n • Five entities that comprise botnet attack: – Botnet operator – Botnet controller – Collection of bots – Botnot software drop – Botnet target • Distributed denial of service (DDOS) attack: bots create “cyber traffic jam” Botnet Threat 11 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Fig. 1.4 – Sample DDOS attack from a botnet 12 National Cyber Security Methodology Components Copyright © 2012, Elsevier In.

Recommended
Recommended
More Related Content
Similar to 11Copyright © 2012, Elsevier Inc. All Rights Reserved.docx
Similar to 11Copyright © 2012, Elsevier Inc. All Rights Reserved.docx (20)
More from RAJU852744
More from RAJU852744 (20)
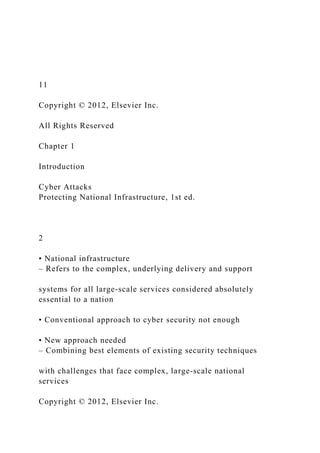
Recently uploaded
Recently uploaded (20)
11Copyright © 2012, Elsevier Inc. All Rights Reserved.docx
- 1. 11 Copyright © 2012, Elsevier Inc. All Rights Reserved Chapter 1 Introduction Cyber Attacks Protecting National Infrastructure, 1st ed. 2 • National infrastructure – Refers to the complex, underlying delivery and support systems for all large-scale services considered absolutely essential to a nation • Conventional approach to cyber security not enough • New approach needed – Combining best elements of existing security techniques with challenges that face complex, large-scale national services Copyright © 2012, Elsevier Inc.
- 2. All rights Reserved C h a p te r 1 – In tro d u c tio n Introduction 3 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p
- 3. te r 1 – In tro d u c tio n Fig. 1.1 – National infrastructure cyber and physical attacks 4 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In
- 4. tro d u c tio n Fig. 1.2 – Differences between small- and large-scale cyber security 5 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio
- 5. n• Three types of malicious adversaries – External adversary – Internal adversary – Supplier adversary National Cyber Threats, Vulnerabilities, and Attacks 6 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio
- 6. n Fig. 1.3 – Adversaries and exploitation points in national infrastructure 7 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n• Three exploitation points – Remote access – System administration and normal usage
- 7. – Supply chain National Cyber Threats, Vulnerabilities, and Attacks 8 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n• Infrastructure threatened by most common security concerns: – Confidentiality
- 8. – Integrity – Availability – Theft National Cyber Threats, Vulnerabilities, and Attacks 9 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n
- 9. Botnet Threat • What is a botnet attack? – The remote collection of compromised end-user machines (usually broadband-connected PCs) is used to attack a target. – Sources of attack are scattered and difficult to identify – Five entities that comprise botnet attack: botnet operator, botnet controller, collection of bots, botnot software drop, botnet target 10 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u
- 10. c tio n • Five entities that comprise botnet attack: – Botnet operator – Botnet controller – Collection of bots – Botnot software drop – Botnet target • Distributed denial of service (DDOS) attack: bots create “cyber traffic jam” Botnet Threat 11 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te
- 11. r 1 – In tro d u c tio n Fig. 1.4 – Sample DDOS attack from a botnet 12 National Cyber Security Methodology Components Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 –
- 12. In tro d u c tio n• Ten basic design and operation principles: – Deception – Discretion – Separation – Collection – Diversity – Correlation – Commonality – Awareness – Depth – Response 13 • Deliberately introducing misleading functionality or misinformation for the purpose of tricking an adversary – Computer scientists call this functionality a honey pot • Deception enables forensic analysis of intruder activity • The acknowledged use of deception may be a deterrent to intruders (every vulnerability may actually be a trap)
- 13. Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Deception 14 Copyright © 2012, Elsevier Inc. All rights Reserved C h a
- 14. p te r 1 – In tro d u c tio n Fig. 1.5 – Components of an interface with deception 15 • Separation involves enforced access policy restrictions on users and resources in a computing environment • Most companies use enterprise firewalls, which are complemented by the following: – Authentication and identity management – Logical access controls – LAN controls
- 15. – Firewalls Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Separation 16 Fig. 1.6 – Firewall enhancements for national infrastructure Copyright © 2012, Elsevier Inc.
- 16. All rights Reserved C h a p te r 1 – In tro d u c tio n 17 • Diversity is the principle of using technology and systems that are intentionally different in substantive ways. • Diversity hard to implement – A single software vendor tends to dominate the PC operating system business landscape – Diversity conflicts with organizational goals of simplifying supplier and vendor relationships
- 17. Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Diversity 18 Copyright © 2012, Elsevier Inc. All rights Reserved C h
- 18. a p te r 1 – In tro d u c tio n Fig. 1.7 – Introducing diversity to national infrastructure 19 • Consistency involves uniform attention to security best practices across national infrastructure components • Greatest challenge involves auditing • A national standard is needed Copyright © 2012, Elsevier Inc. All rights Reserved
- 19. C h a p te r 1 – In tro d u c tio n Commonality 20 • Depth involves using multiple security layers to protect national infrastructure assets • Defense layers are maximized by using a combination of functional and procedural controls Copyright © 2012, Elsevier Inc. All rights Reserved C
- 20. h a p te r 1 – In tro d u c tio n Depth 21 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 –
- 21. In tro d u c tio n Fig. 1.8 – National infrastructure security through defense in depth 22 • Discretion involves individuals and groups making good decisions to obscure sensitive information about national infrastructure • This is not the same as “security through obscurity” Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 –
- 22. In tro d u c tio n Discretion 23 • Collection involves automated gathering of system- related information about national infrastructure to enable security analysis • Data is processed by a security information management system. • Operational challenges – What type of information should be collected? – How much information should be collected? Copyright © 2012, Elsevier Inc. All rights Reserved C h a
- 23. p te r 1 – In tro d u c tio n Collection 24 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In
- 24. tro d u c tio n Fig. 1.9 – Collecting national infrastructure-related security information 25 • Correlation involves a specific type of analysis that can be performed on factors related to national infrastructure protection – This type of comparison-oriented analysis is indispensable • Past initiatives included real-time correlation of data at fusion center – Difficult to implement Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te
- 25. r 1 – In tro d u c tio n Correlation 26 Fig. 1.10 – National infrastructure high- level correlation approach Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 –
- 26. In tro d u c tio n 27 • Awareness involves an organization understanding the differences between observed and normal status in national infrastructure • Most agree on the need for awareness, but how can awareness be achieved? Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro
- 27. d u c tio n Awareness 28 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n
- 28. Fig. 1.11 – Real-time situation awareness process flow 29 • Response involves the assurance that processes are in place to react to any security-related indicator – Indicators should flow from the awareness layer • Current practice in smaller corporate environments of reducing “false positives” by waiting to confirm disaster is not acceptable for national infrastructure Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio
- 29. n Response 30 Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Fig. 1.12 – National infrastructure security response approach
- 30. 31 • Commissions and groups • Information sharing • International cooperation • Technical and operational costs Copyright © 2012, Elsevier Inc. All rights Reserved C h a p te r 1 – In tro d u c tio n Implementing the Principles Nationally
- 31. 1 EEE 188 Review Problems Date: 05/01/2018 Problem 1: Controllability of a two-tank system The hydraulic system shown in figure 1 consists of two tanks. It is obvious that the input cannot change level x1. Without any calculations, is the system (two tanks) controllable? If your answer is yes, do the following 1) Use the Ziegler-Nichols method to design a PID controller so that r1 = 10cm,r2 = 12cm 2) Design state feedback with integral action to place the poles at 0.15,0.11,0.55. Problem 2: Observability without the output matrix For a given system x(k + 1) = −0.25x(k) + αu(k) (1) Are there any restrictions on the values of α for the system to be observable? If the answer is yes, discuss these restrictions and design an observer for the system. Problem 3: State feedback for cruise control We want to design a cruise control system to keep constant speed at 40 (the unit is miles/ hour). The schematics and block diagrams are shown in figure 2. In this problem we can measure the speed of the car. Newton’s law gives
- 32. v̇ = − b m v + 1 m u (2) where m is the car’s mass and b is damping coefficient. It is assumed that the parameters of the system are: m = 1000kg, b = 50N.s/m (3) Therefore, the continuous time system is given by v̇ = −0.05v + 10−3u (4) The discrete time state space model is v(k + 1) = 0.95v(k) + 10−3u(k) (5) The sampling time for this problem is T = 1s. The output equation is given by y(k) = v(k) (6) Fig. 1. A system of two tanks 2 Fig. 2. Cruise Control system
- 33. We want to design state feedback with integral action. Under this formulation, the augmented system is given by x(k + 1) = [ v(k + 1) z(k + 1) ] = [ 0.95 0 −1 1 ][ v(k) z(k) ] + [ 10−3 0 ] u(k) + [ 0 1
- 34. ] r(k) (7) where the augmented state space vector is x = [ v z ]T 1) What is the numerical value of C (output matrix)? 2) What is the size of the gain matrix K under the proposed control law? 3) Design state feedback with integral control to place the eigenvalues of the closed loop system at 0.3 and 0.6. Note that: det ( λI − ([ 0.95 0 −1 1 ] − [ 10−3 0 ][ K1 K2 ]))
- 35. = λ2 − K2/1000 − (39λ)/20 − K1/1000 + (K1λ)/1000 + 19/20 4) Write the numerical values of the state transition matrix of the closed loop system Acl = A − BK 5) Find the numerical values of the eigenvalues of the closed loop system (Acl). 6) How are these closed loop system eigenvalues related to the desired eigenvalues? 7) What does the second variable in the augmented system (variable z) represent (error, square of the error, integral of the error . . .)? Problem 4: Controllability and observability In this problem we want to control the liquid levels h1 and h2 in the coupled tank system of figure 3. Assuming the cross sectional area of the tanks is equal to 1 (SI unit), the liquid levels can be described by the following equations in the continuous state space domain ḣ1(t) = qi(t) − qb(t) (8) ḣ2(t) = qb(t) − qc(t) where qi and qc are control variables. The flow qb between Tank 1 and Tank 2 cannot be used to change the liquid levels in a controlled way, therefore it is treated as a disturbance. The desired values for the liquid levels are r1 = 2cm and r2 = 3cm for Tank 1 and Tank 2, respectively. 1) Write the discrete time model corresponding to system (8). For simplicity, we take a sampling time of 1 second (T = 1s). 2) Assuming the discrete time model is given by
- 36. h1(k + 1) = h1(k) + qi(k) − qb(k) (9) h2(k + 1) = h2(k) + qb(k) − qc(k) (10) y1(k) = h1(k) (11) y2(k) = h2(k) (12) 3 Fig. 3. Two Tank system for problem where y1,y2 represent the outputs. Write matrices A,B and C for the system. Recall that qb is a disturbance, therefore, its is not part of the input space (you can assume that qb = 0 when writing the input matrix). 3) Build the controllability matrix 4) Is the system controllable?Explain. 5) Build the observability matrix 6) Is the system observable?Explain 7) Write simple equations for the errors e1(k),e2(k) in terms of the liquid levels and the desired values. Problem 5 PI controller design This problem can be seen as a continuation of the previous problem. We want to design a proportional and integral controller for Tank 1 and just a proportional controller for Tank 2. Based on this, the expression in the z-domain of the control inputs are given by Qi(z) = K1E1(z) + K2 z
- 37. z − 1 E1(z) (13) Qc(z) = K3E2(z) (14) where K1,K2 and K3 are the controllers gains and E1(z) and E2(z) are the errors for Tank 1 and Tank 2, respectively. 1) After closing the loop for Tank 2, we obtain H2(z) = −K3R2(z) + Qb(z) z − 1 − K3 (15) What is the interval of K3 to keep a stable closed loop system? 2) Design a proportional controller to place the pole at 0.5. 3) After closing the loop for Tank 1, we obtain H1(z) = (K1z + K2z − K1)R2(z) − (z − 1)Qb(z) z2 + (K1 + K2 − 2)z + 1 − K1 (16) Design a proportional and integral controller to place the poles at 0.5,0.4. Use pole placement technique. 4) The closed loop response for the liquid levels is shown in figure 4 (top corresponds to h1(k) and bottom to h2(k)) What is the steady state error for h1 from the graph? 4
- 38. 0 2 4 6 8 10 12 14 16 18 20 0 0.5 1 1.5 2 2.5 L e v e l h 1 time (s) h1(k) r1 = 2cm 0 2 4 6 8 10 12 14 16 18 20 0 1 2 3
- 39. 4 L e v e l h 2 time (s) r2 = 3cm h2(k) Fig. 4. Evolution of h1 and h2. The desired values are r1 = 2cm and r2 = 3cm for Tank 1 and Tank 2, respectively. 5) What is the steady state error for h2 from the graph? 6) Why is the steady state error zero for one tank but not for the other one? 7) Propose a simple way to achieve zero steady state error for tank 2. No calculations needed. 8) Under the proposed control laws, the controllers’ actions are given by qi(k) = K1e1(k) + K2 k∑ n=0 e1(k) (17) qc(k) = K3e2(k) (18)
- 40. Knowing that at time k = 6, the liquid levels are h1(6) = 2.38 and h2(6) = 2.58, calculate the control actions at time k = 7. Note that: qb = 0.1,K1 = 0.5,K2 = 0.15,K3 = −0.2,r1 = 2,r2 = 3. Note that the area between the curve representing h1 and r1 in the time interval [0,6] is 1.33.