
Recommended
More Related Content
Similar to УВОД У МЕХАТРОНИКУ
Similar to УВОД У МЕХАТРОНИКУ (19)
УВОД У МЕХАТРОНИКУ
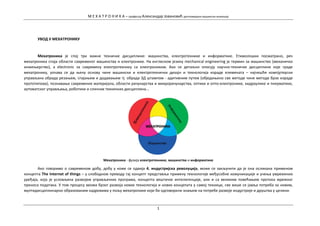
- 1. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 1 УВОД У МЕХАТРОНИКУ Мехатроника је спој три важне техничке дисциплине: машинства, електротехнике и информатике. Етимолошки посматрано, реч мехатроника спаја области савременог машинства и електронике. На енглеском језику mechanical engineering је термин за машинство (механичко инжењерство), а electronic за савремену електротехнику са електроником. Ако се детаљно описују научно-техничке дисциплине које граде мехатронику, уочава се да њену основу чине машински и електротехнички дизајн и технологија израде елемената – најчешће компјутерски управљана обрада резањем, спајањем и додавањем тј. обрада 3Д штампом - адитивним путем (обједињено све методе чине методе брзе израде прототипова), познавање савремених материјала, области рачунарства и микрорачунарства, оптике и опто-електронике, хидраулике и пнеуматике, аутоматског управљања, роботике и сличних техничких дисциплина... Мехатроника - фузија електротехнике, машинства и информатике Ако говоримо о савременом добу, добу у коме се одвија 4. индустријска револуција, може се закључити да је она осликана применом концепта The Internet of things – у слободном преводу тај концепт представља примену технологије међусобне комуникације и учења умрежених уређаја, која је условљена развојем управљачких програма, концепта вештачке интелигенције, али и са великим повећањем протока мрежног преноса података. У том процесу веома брзог развоја нових технологија и нових концепата у самој техници, све више се јавља потреба за новим, мултидисциплинарно образованим кадровима у пољу мехатронике који би одговорили знањем на потребе развоје индустрије и друштва у целини.
- 2. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 2 The Internet of things – концепт примене „паметних“, умрежених уређаја Средњошколски кораци у свет мехатронике, ученицима техничког усмерења, треба да буду првенствено осигурани „жељом“ да нешто самостално направе, а никако не смеју да буду ослабљени страхом од нових знања и технологија, које за све нас, на почетку учења, увек делују несавладиво. Техничари за компјутерско управљање највише часова користе за стицање знања и вештина у пољу савременог машинског дизајна и израде машинских делова. У овом пољу, пољу мехатронике ученици треба да науче нове методе које могу да дизајниране и израђене предмете „оживе“, захваљујући адекватно програмираном кретању. Све више се у савременим мехатронским системима примењује вештачка интелигенција, као облик аутономног учења техничких система. Овај концепт се остварује применом савремених метода: машинског учења, неуронских мрежа, fuzzy логике и других метода. Пројекти кућне аутоматизације и роботике, данас лако оствариви применом метода мехатронике
- 3. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 3 Као прве појмове које ћемо дефинисати у пољу мехатронике биће појмови управљања, контроле, мерења, аналогних и дигиталних величина, отворених, затворених и комбинованих система аутоматског управљања, сензора. Након дефинисања свих ових, за мехатронику веома битних појмова, дефинисаћемо основна знања и вештине које су неопходне да би се мехатроника савладала у потпуности. Управљање је процес дефинисања жељене величине (жељеног исхода) везане за рад система (ми у оквиру мехатронике проучавамо техничке системе, али слични концепти важе и за биолошке и друштвене системе – Кибернетика - Н.Винер) који почиње саопштавањем управљачке информације објекту управљања. Ефикасно управљање подразумева да се континуално прати промена излазне величине и њено одступање од жељене - тај процес називамо контролом, а уређаје који детектују промене сензорима (у аутоматизацији ту улогу имају мерни системи, мерни претварачи јер они детектују и/или претварају информацију о мереној величини у нама погодан облик за очитавање или поређење). Отворени системи аутоматског управљања са или без директне компензације поремећаја се карактеришу неконтролисањем/нерегулацијом стварне, излазне величине у односу на жељену, већ такви системи делимично, или уопште не компензују дејство поремећаја. Отворени систем без и са директном компензацијом поремећаја Затворени систем аутоматског управљања има повратну спрегу која омогућује благовремену информацију о стварној вредности излазне величине система. Ова величина се стално приближава жељеној величини, континуалним дејством регулатора који пореди ове две величине и врши корекцију управљачког сигнала. Управљачки сигнал се објекту регулације саопштава актуатором (нпр. мотором, пнеуматским цилиндром). Процес остваривања повратне спреге је немогуће остварити без примене сензорског елемента (мерно-претварачког елемента). Сензорским елементима ће бити посвећено доста времена у оквиру наставе мехатронике у првом полугодишту. На следећим сликама можете видети блок шеме затвореног, комбинованог система аутоматског управљања, али и система аутоматског управљања са детаљним описом свих елемената система.
- 4. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 4 Затворени и комбиновани систем аутоматског управљања Сложена шема затвореног система аутоматског управљања
- 5. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 5 Аналогне и дигиталне величине можемо лако дефинисати и самим тим упоредити, ако користимо етимологију (науку која се бави тумачењем изворног облика које дефинише значење те речи). Дигитално се у слободном преводу често преводи као „нумеричко“ (бинарно – систем 0 и 1), „цифарско“, али то заправо није комплетно тумачење овог појма. Прецизно дефинисање појма дигиталног облика, може се добити у корену речи Digitus – lat. прст (бројање на прсте, степенасто, ступњевито, корачно, са скоком), јер се промене свих дигиталних величина своде на коначан број степенастих промена које граде финалну вредност (нпр. ограничена резолуција дисплеја монитора са тачно дефинисаним бројем пиксела у матрици 4К, 2К, Full HD – 1920 x 1080 pixel-а по ширини и висини). Аналогни начин дефинисања и представљања неке величине представља њену континуалну промену са било којом вредности у распону између минималне и максимално могуће оствариве вредности те аналогне величине. Аналогна величина је комплекснија за процес преноса (најчешће), дигитална повољнија, али се применом дигитализације квалитет изворне информације губи због ограничене резолуције података. Аналогни и дигитални сигнал – континуална и степенаста промена
- 6. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 6 Правилно дефинисани увод у једну од најсавременијих и можда најлепших техничких дисциплина обавља се систематизацијом потребних знања и вештина које актуелним мехатроничарима олакшавају процес креације новог мехатронског система. Сваки стручњак у овом пољу мора првенствено да има идеју насталу из потребе изградње новог техничког система који мора да обавља одређену функцију. На пример, на основу настале потребе за изградњом новог система грејања који ће рационално трошити енергију и материјална средства, циљ је да се изгради мехатронски систем котла који користи пелет, а регулише се поређењем жељене (задате) и стварне температуре у просторијама и на друге начине према жељи купца. Прво се на основу идејног концепта нацртају скице новог система, а тек онда измоделира оптимално решење машинског система. Затим се коригују та решења, јер се у другој фази анализира и проверава дизајнирани машински склоп тако да буде погодан за рад и сачињен од компатибилних актуаторских и управљачких система. Поменути мехатронски систем котла, од мерно-претварачких, сензорских елемената, може да има сензор детекције пламена, сензор температуре продуката сагоревања, сензор температуре у просторији, нивометар пелета у спремишту, мерач реалног времена са аспекта могућности даљинског или временског програмирања укључивања котла, али и моторе које ће транспортовати пужним транспортером пелет до горионика, чије се укључивање такође мора регулисати познавајући физику процеса са адекватним решењем грејача (актуатора) који је најоптималнији за комплетно идејно решење котла и вентилатора који треба да обезбеди адекватан проток ваздуха за што потпуније сагоревање. Следећа фаза је примена програмабилних микроконтролера, програмабилних логичких контролера (PLC система) са којима се информације добијене из сензора обрађују и прави управљачки програм који ће се у адекватном облику преносити до актуатора и управљати системом на основу задатих улазних величина: задатог времена укључивања и времена искључивања, жељене температуре у соби, жељене температуре продуката сагоревања пелета, оптималне потрошње пелета и сл... По окончању процеса пројектовања, приступа се технологији израде свих елемената поступцима машинске обраде резањем, спајањем, деформисањем, али и применом неконвенционалних поступака обраде – 3Д штампом метала, ласерским резањем или заваривањем, електроерозионом обрадом. Електрокомпоненте такође подразумевају израду и повезивање електро-ормана, разводних кутија, каналица за проводнике и конектора за повезивање, штампаних плочица за постављање електронских елемената, уколико се определимо за микроконтролерске развојне системе.
- 7. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 7 Скица мехатронског система котла и повезивање сензорских и актуаторских елемената
- 8. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 8 Шема повезивања сензора са елементима система управљања и са актуаторима (моторима, грејачима, вентилаторима) Претходни пример је пример мехатронског система реалне намене, средњег степена сложености. Задатк ученика је да читањем овог текста са разумевањем, направе први корак и схвате основне појмове у мехатроници.
- 9. М Е Х А Т Р О Н И К А – професор Александар Јовановић дипломирани машински инжењер 9 Биће речи о моторима, сензорима, електронским компонентама, технолошком моделирању и 3Д штампом, принципима и методама мерења физичких величина у електротехници, али и о основним принципима монтаже елемената. Као управљачки систем користиће се Ардуино платформа која има велики број написаних програма за комуникацију са различитим облицима сензора и актуатора и која се програмира у некој прилагођеној верзији програмског језика C. Ардуино платформа у функцији управљања мехатронским системом Ардуино платформа у едукацијској улози у савременим кабинетима мехатронике