
Recommended
More Related Content
Viewers also liked
Viewers also liked (17)
Similar to Triptico (Magdeburgh)
Similar to Triptico (Magdeburgh) (20)
More from Grupo Golem (DCC-IIMAS-UNAM)
More from Grupo Golem (DCC-IIMAS-UNAM) (9)
Triptico (Magdeburgh)
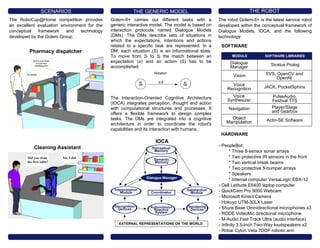
- 1. TASK DESCRIPTION Golem-II+ carries out different tasks with a generic interactive model. The model is based on interaction protocols named Dialogue Models (DMs). The DMs describe sets of situations in which the expectations, intentions and actions related to a specific task are represented. In a DM, each situation (S) is an informational state. To move from Si to Sj the match between an expectation (α) and an action (ß) has to be accomplished. The Interaction-Oriented Cognitive Architecture (IOCA) integrates perception, thought and action with computational structures and processes. It offers a flexible framework to design complex tasks. The DMs are integrated into a cognitive architecture in order to coordinate the robot's capabilities and its interaction with humans. THE GENERIC MODEL Notation Si Sj α:ß THE ROBOT HARDWARE - PeopleBot: * Three 8-sensor sonar arrays * Two protective IR sensors in the front * Two vertical break beams * Two protective 5-bumper arrays * Speakers * Internal computer VersaLogic EBX-12 - Dell Latitude E6400 laptop computer - QuickCam Pro 9000 Webcam - Microsoft Kinect Camera - Hokuyo UTM-30LX Laser - Shure Base Omnidirectional microphones x3 - RODE VideoMic directional microphone - M-Audio Fast Track Ultra (audio interface) - Infinity 3.5-Inch Two-Way loudspeakers x2 - Robai Cyton Veta 7DOF robotic arm SOFTWARE SOFTWARE LIBRARIES JACK, PocketSphinx SVS, OpenCV and OpenNI Sicstus Prolog PulseAudio, Festival TTS Player/Stage and Gearbox MODULE Navigation Dialogue Manager Vision Voice Recognition Voice Synthesizer Object Manipulation Actin-SE Software IOCA EXTERNAL REPRESENTATIONS OR THE WORLD Coordinator Perceptual Memory Dialogue Manager Semantic Memory Satisfaction Module Interpretation Module Autonomous Reactive System Rendering Devices Recognition Devices IOCA SCENARIOS Pharmacy dispatcher Cleaning Assistant The RoboCup@Home competition provides an excellent evaluation environment for the conceptual framework and technology developed by the Golem Group. The robot Golem-II+ is the latest service robot developed within the conceptual framework of Dialogue Models, IOCA, and the following technology:
- 2. Departamento de Ciencias de la Computación RoboCup German Open 2012 A generic model of coordinated communication and action for service robots Universidad Nacional Autónoma de México Instituto de Investigaciones en Matemáticas Aplicadas y en Sistemas Departamento de Ciencias de la Computación THE GOLEM GROUP Luis Pineda (team leader) Ivan Meza Caleb Rascón Gibran Fuentes Mario Peña Carlos Gershenson Iván Sánchez Mauricio Reyes Arturo Rodríguez Hernando Ortega Miguel Salazar Lisset Salinas Joel Durán Varinia Estrada http://golem.iimas.unam.mx The Golem Group presents a generic model for solving service robot tasks. The model proposes an abstract solution for the managing of diverse kinds of behaviors in systems based on human-robot interaction. The model is implemented in Golem-II+, which coordinates its multimodal capabilities to perform communicative interactions independently of the domain and the concrete task. It also includes communicative strategies for error prevention and recovery. Golem-II+ is able to: * listen and interpret linguistic instructions * explain the information requested by the user about the domain * navigate through its environment * visual object recognition * grasp objects * recover from misinterpretations The system interacts with the user in an intentional level. The robot's actions are causally related to the expressed intentions during the communication process. golem@turing.iimas.unam.mx THE GOLEM GROUP GOLEM-II+