A Rubbertuator-Based Structure-Climbing Inspection Robot
Poster
1. Submersible ROV
Introduction
There are a large number of Submersible
Remotely OperatedVehicles (ROV) on the
market, however they can be prohibitively
expensive.
This project plans to design and prototype a
cheap yet effective Submersible ROV.
Ben Bingham
P10547076
Mechatronic
Engineering
Supervisor : Dr Seng Chong
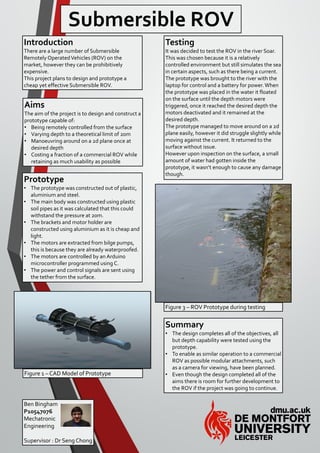
Testing
It was decided to test the ROV in the river Soar.
This was chosen because it is a relatively
controlled environment but still simulates the sea
in certain aspects, such as there being a current.
The prototype was brought to the river with the
laptop for control and a battery for power.When
the prototype was placed in the water it floated
on the surface until the depth motors were
triggered, once it reached the desired depth the
motors deactivated and it remained at the
desired depth.
The prototype managed to move around on a 2d
plane easily, however it did struggle slightly while
moving against the current. It returned to the
surface without issue.
However upon inspection on the surface, a small
amount of water had gotten inside the
prototype, it wasn’t enough to cause any damage
though.
Summary
• The design completes all of the objectives, all
but depth capability were tested using the
prototype.
• To enable as similar operation to a commercial
ROV as possible modular attachments, such
as a camera for viewing, have been planned.
• Even though the design completed all of the
aims there is room for further development to
the ROV if the project was going to continue.
Aims
The aim of the project is to design and construct a
prototype capable of:
• Being remotely controlled from the surface
• Varying depth to a theoretical limit of 20m
• Manoeuvring around on a 2d plane once at
desired depth
• Costing a fraction of a commercial ROV while
retaining as much usability as possible
Prototype
• The prototype was constructed out of plastic,
aluminium and steel.
• The main body was constructed using plastic
soil pipes as it was calculated that this could
withstand the pressure at 20m.
• The brackets and motor holder are
constructed using aluminium as it is cheap and
light.
• The motors are extracted from bilge pumps,
this is because they are already waterproofed.
• The motors are controlled by an Arduino
microcontroller programmed using C.
• The power and control signals are sent using
the tether from the surface.
Figure 1 – CAD Model of Prototype
Figure 3 – ROV Prototype during testing