


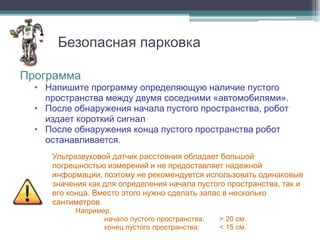





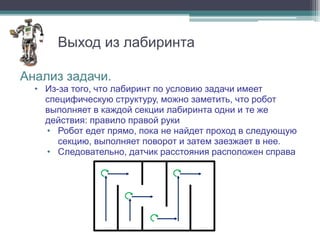









Документ описывает задачи программирования Lego-роботов, включая безопасную парковку и выход из лабиринта. Для парковки робот должен определить наличие свободного пространства между 'автомобилями', используя датчики расстояния и поворота. При выходе из лабиринта робот применяет правило правой руки и датчик касания для нахождения стартовой точки после заезда в секцию.
































