Downloaded 121 times

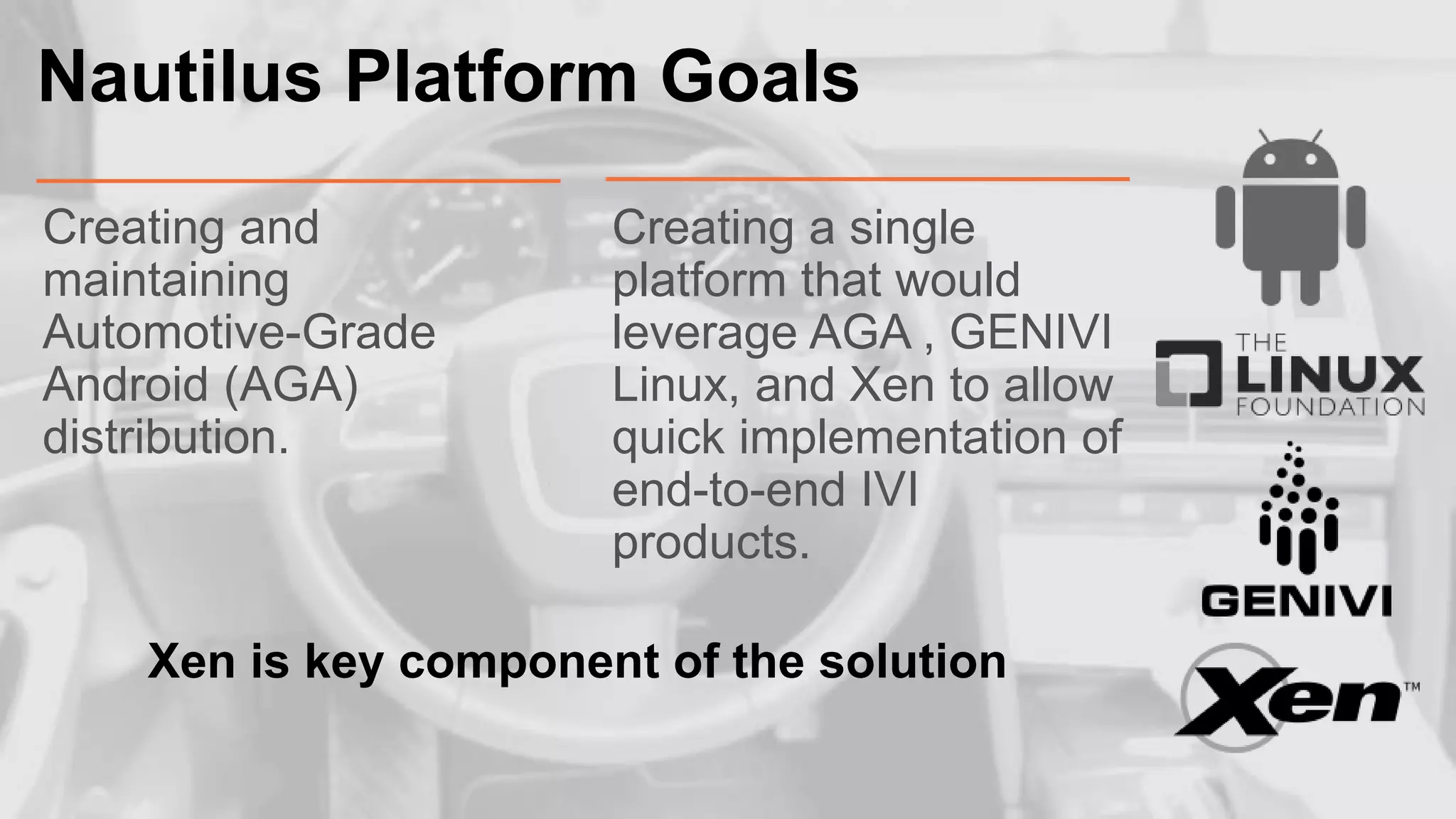
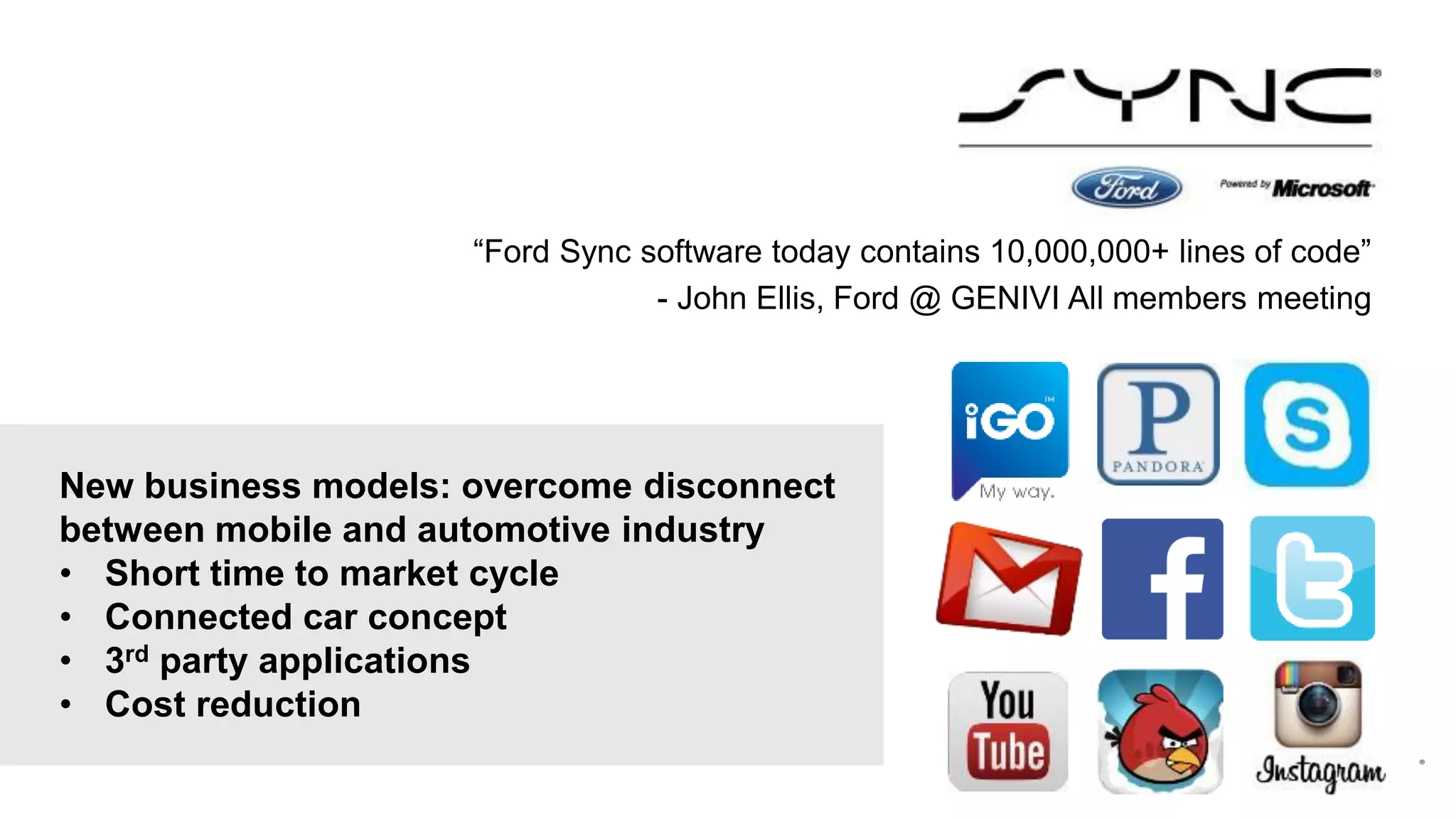

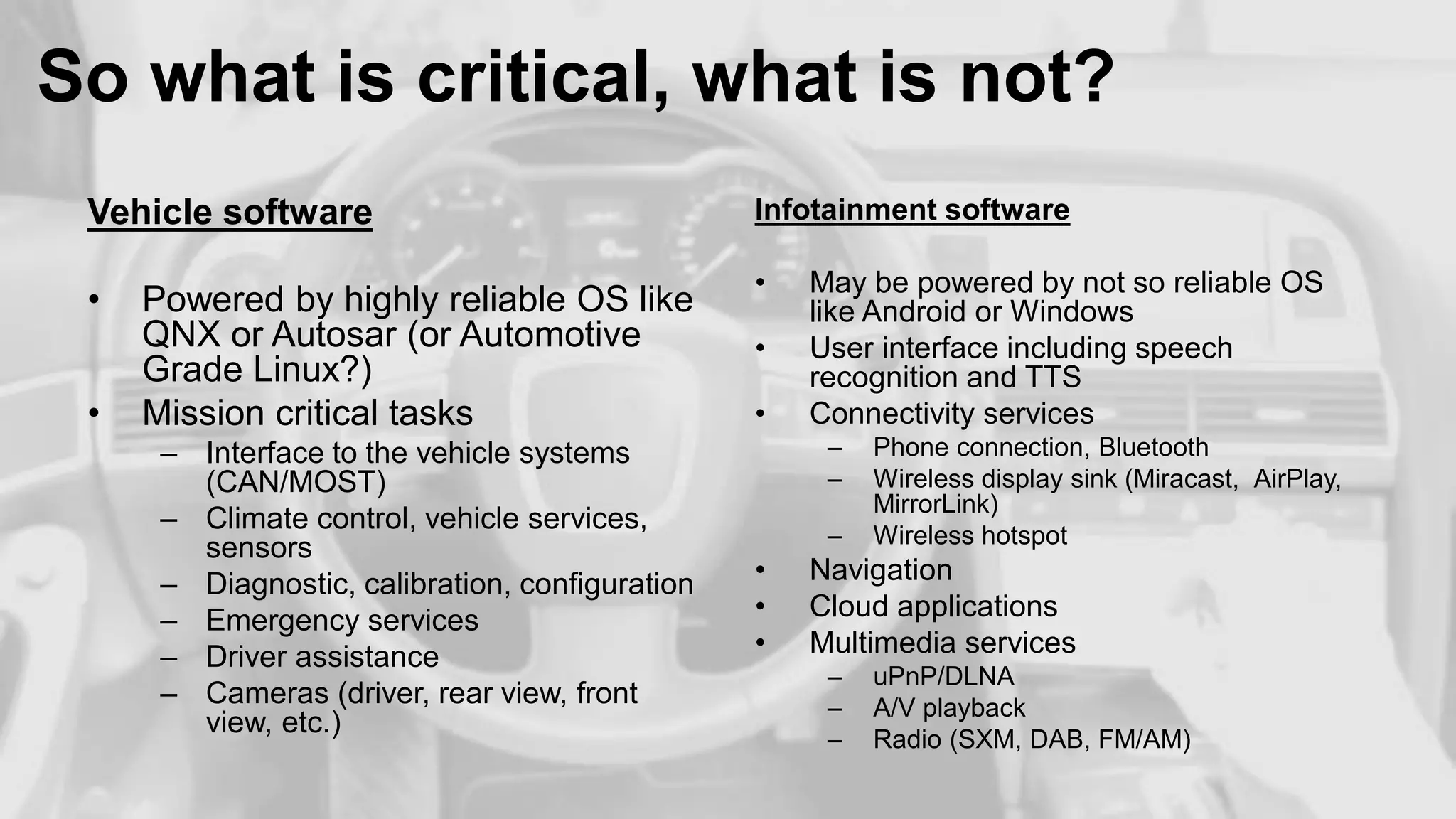
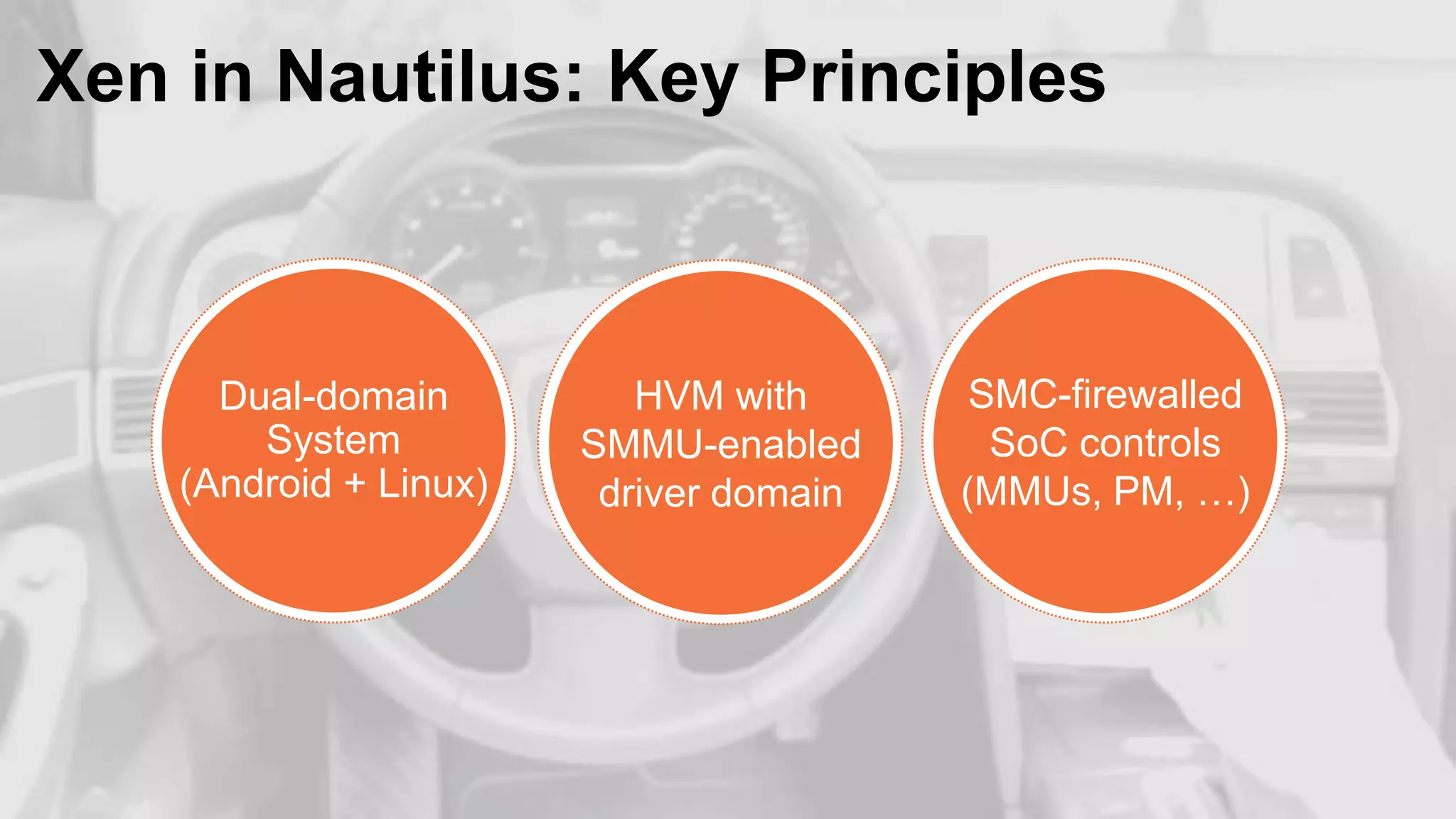
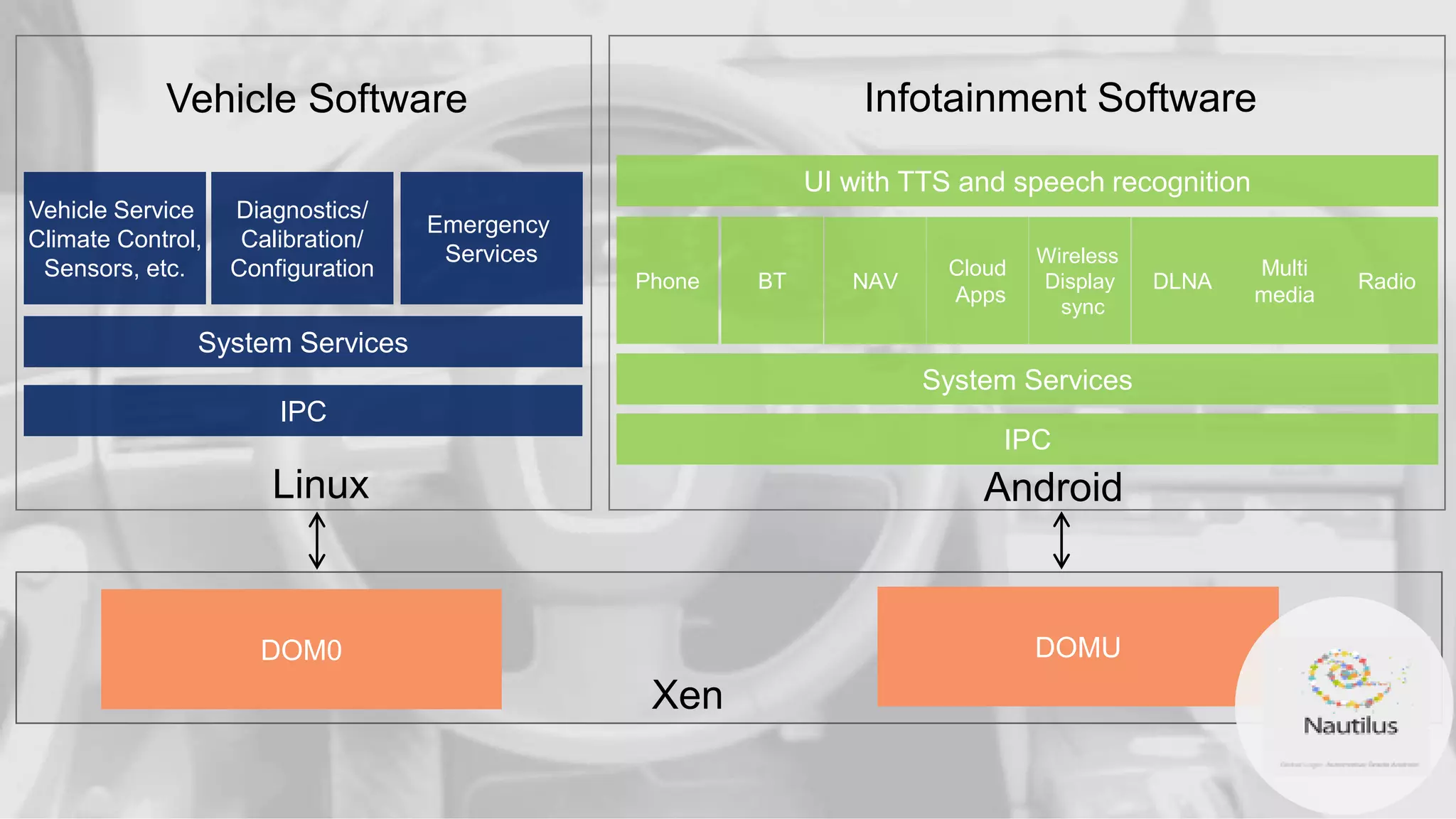

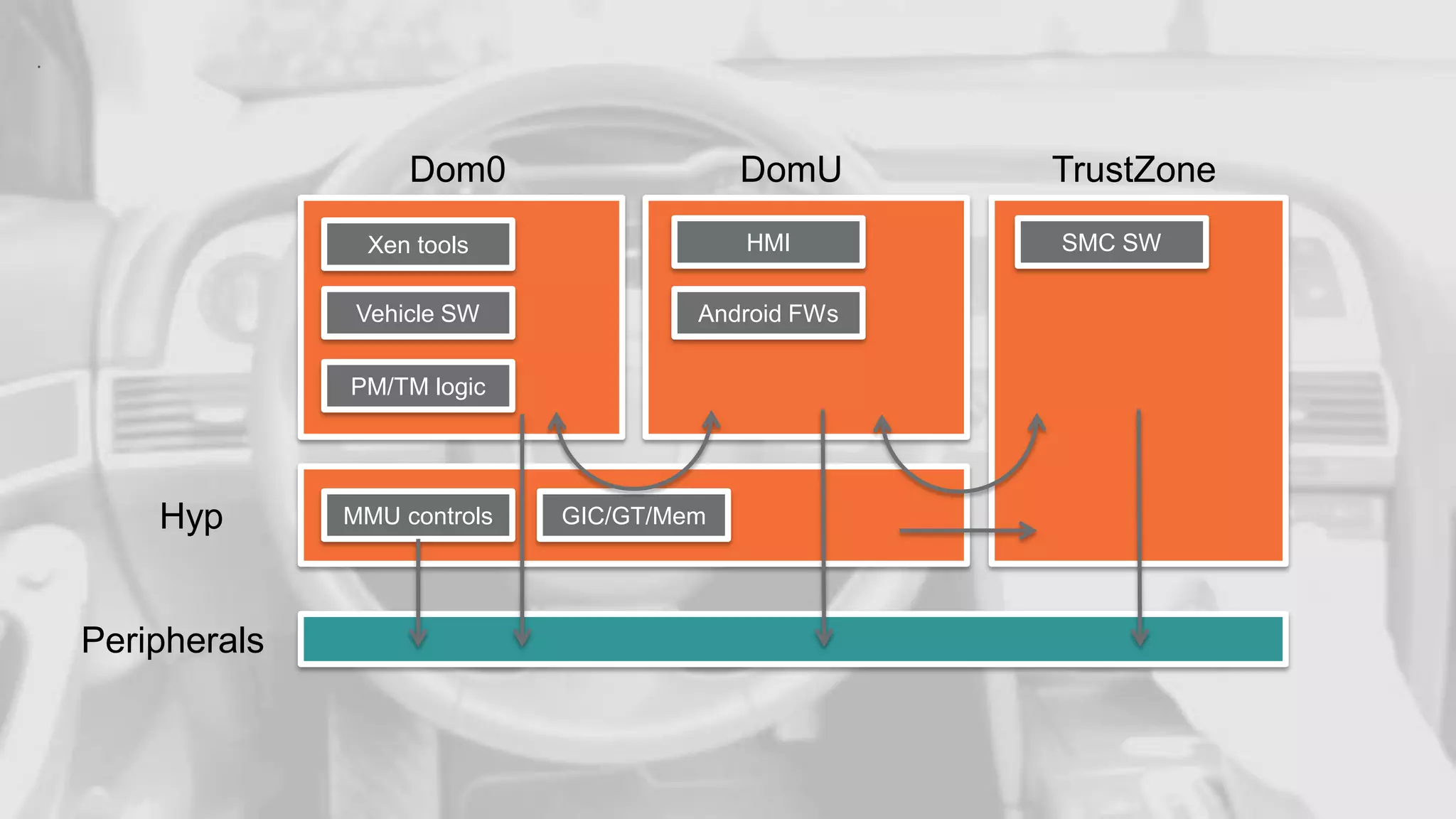
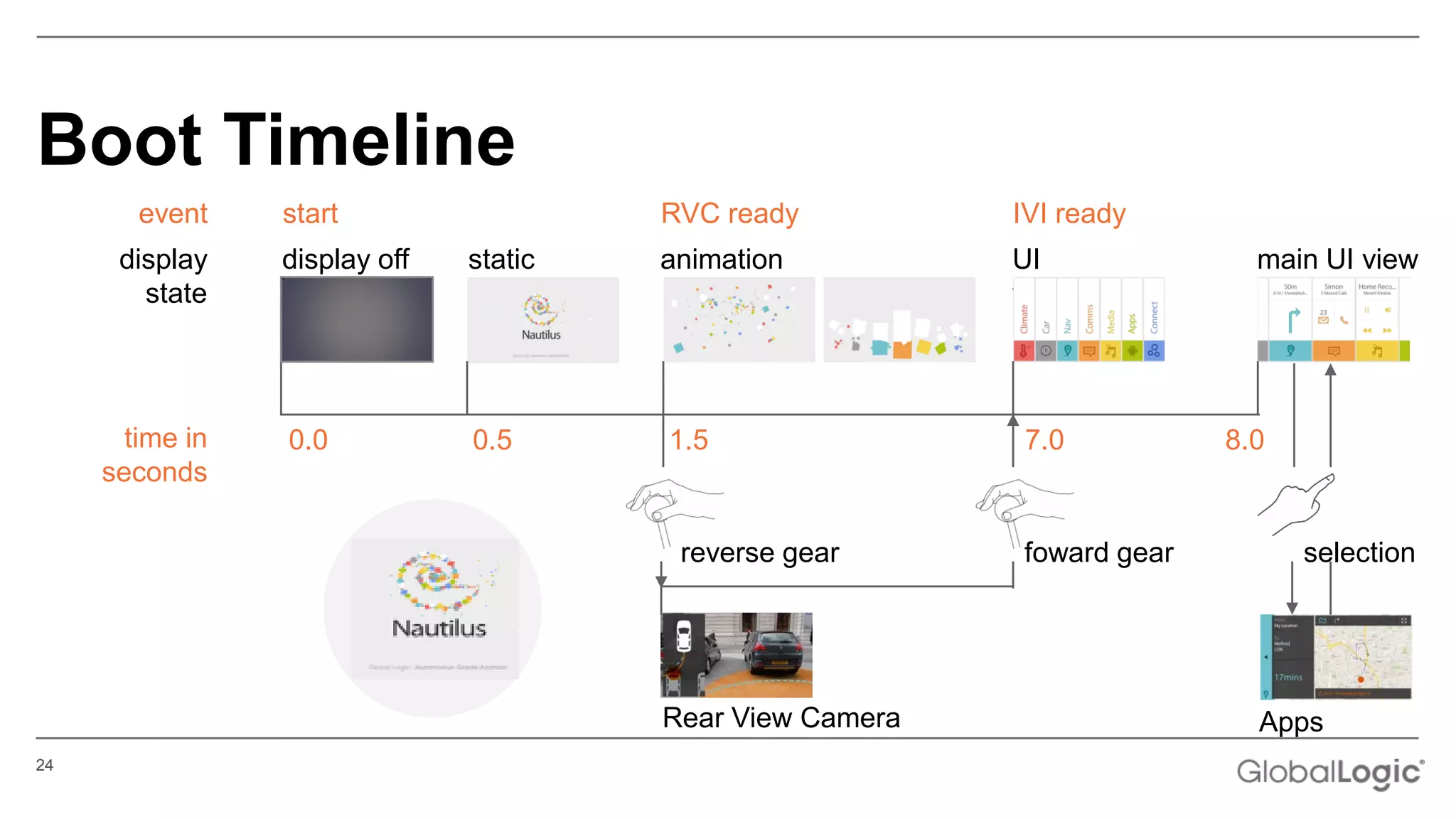
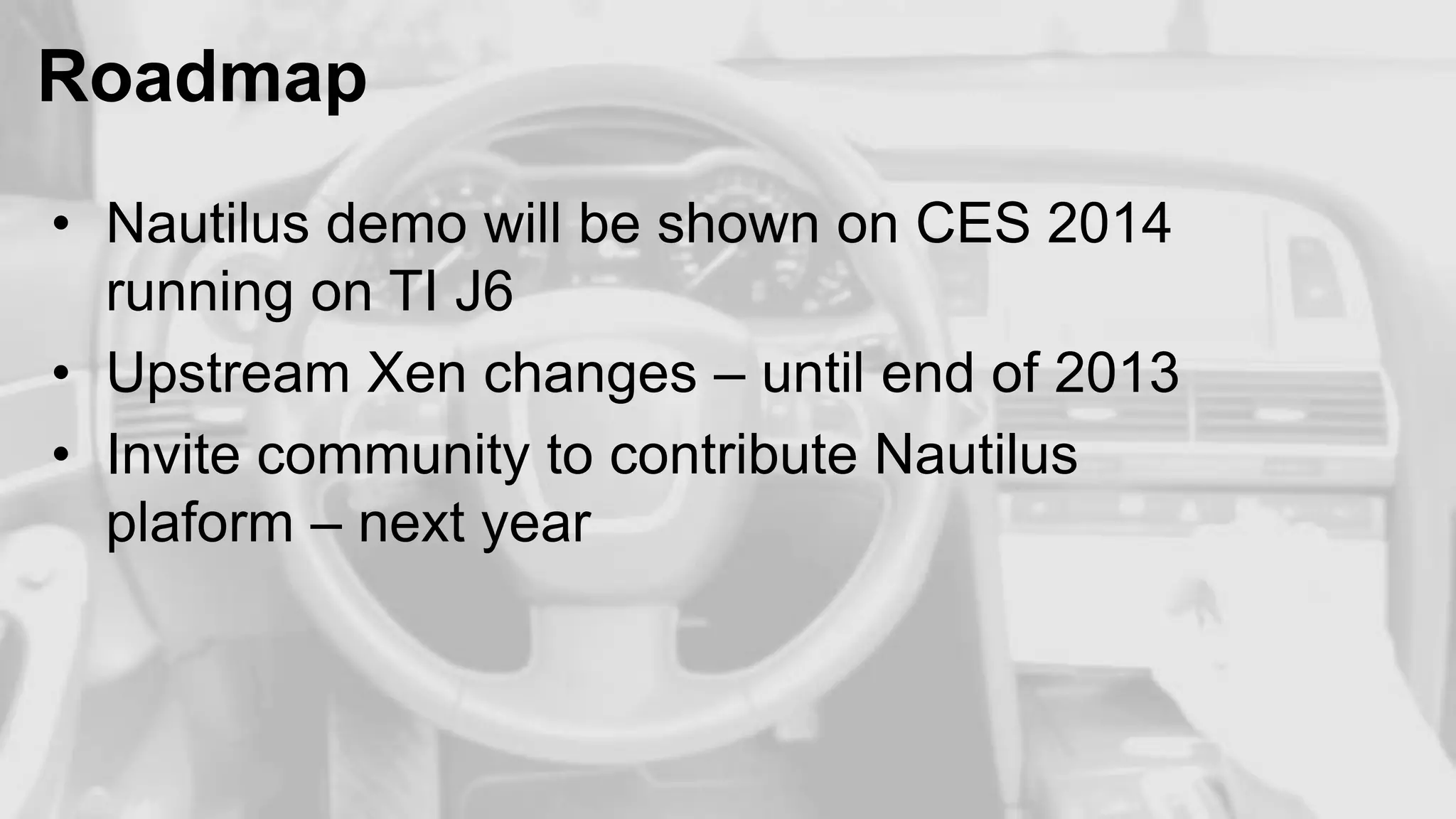



The document discusses the development of the Nautilus platform, aimed at creating an automotive-grade Android distribution that integrates multiple operating systems for in-vehicle infotainment systems. It highlights the use of Xen hypervisor for virtualization to reduce time to market and improve system reliability, as well as the functionality required for both vehicle and infotainment software. Key features include dual-domain systems, support for various multimedia capabilities, and a roadmap for future enhancements.














































![XPDDS19: [ARM] OP-TEE Mediator in Xen - Volodymyr Babchuk, EPAM Systems](https://cdn.slidesharecdn.com/ss_thumbnails/xendevsummit2019-babchuk-op-tee-190812095541-thumbnail.jpg?width=640&height=640&fit=bounds)






































