Bab 1 sistem kontrol
•Download as DOC, PDF•
1 like•560 views

materi ini untuk mahasiswa teknik
![Blok Diagram :
Kelebihan : komponen-komponen relatif lebih murah dan cukup akurat
Kekurangan : stabilitas menjadi persoalan utama
TRANSFORMASI LAPLACE
∫
∞
−
==
0
st
.dtf(t).eF(s)α[f(t)]
A. Fungsi Step
F(t) = 0 untuk t < 0
= A untuk t > 0
A
0 t
∫
∞
∞−−=−=
0
0
|ste
s
A
.dtstA.eF(s)
= 1)(0
s
A
−−
=
s
A
B. Fungsi Pulse
F(t) = 0 untuk t < 0 & t >T
= A untuk 0 ≤ t ≤ T](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
Viewers also liked
Viewers also liked (13)
Bab 1 sistem kontrol
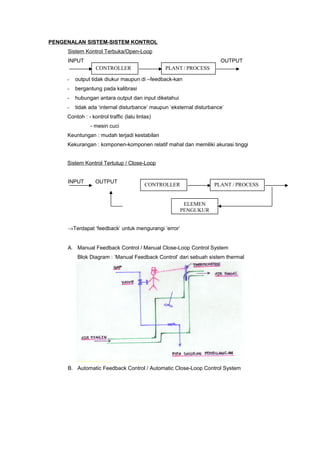
- 1. PENGENALAN SISTEM-SISTEM KONTROL Sistem Kontrol Terbuka/Open-Loop INPUT OUTPUT - output tidak diukur maupun di –feedback-kan - bergantung pada kalibrasi - hubungan antara output dan input diketahui - tidak ada ‘internal disturbance’ maupun ‘eksternal disturbance’ Contoh : - kontrol traffic (lalu lintas) - mesin cuci Keuntungan : mudah terjadi kestabilan Kekurangan : komponen-komponen relatif mahal dan memiliki akurasi tinggi Sistem Kontrol Tertutup / Close-Loop INPUT OUTPUT →Terdapat ‘feedback’ untuk mengurangi ‘error’ A. Manual Feedback Control / Manual Close-Loop Control System Blok Diagram : ‘Manual Feedback Control’ dari sebuah sistem thermal B. Automatic Feedback Control / Automatic Close-Loop Control System CONTROLLER ER PLANT / PROCESS CONTROLLER ER PLANT / PROCESS ELEMEN PENGUKUR
- 2. Blok Diagram : Kelebihan : komponen-komponen relatif lebih murah dan cukup akurat Kekurangan : stabilitas menjadi persoalan utama TRANSFORMASI LAPLACE ∫ ∞ − == 0 st .dtf(t).eF(s)α[f(t)] A. Fungsi Step F(t) = 0 untuk t < 0 = A untuk t > 0 A 0 t ∫ ∞ ∞−−=−= 0 0 |ste s A .dtstA.eF(s) = 1)(0 s A −− = s A B. Fungsi Pulse F(t) = 0 untuk t < 0 & t >T = A untuk 0 ≤ t ≤ T
- 3. A 0 T t ∫ ∞ −= 0 .dtstf(t).eF(s) )ste(1 s A 1)st(e s A T 0 |st.e s A T 0 .dtstA.e −−= −−−= −−= −= ∫ Fungsi Unit Step : f(t) = 1 (t) →F(s) = 1/s C. Fungsi Impulse to A 0to limf(t) → = untuk 0 < t < to = 0 untuk t < 0 & to < t )o st e(1 s 0 t A 0 t limF(s) − − ∞→ = s s A (tos) dto d )]stoe[A(1 dto d 0to lim = −− → = = A Fungsi Unit-Impulse : f(t) = δ(t) F(s) = 1 D. Fungsi Ramp F(t) = 0 untuk t < 0 = At untuk t ≥ 0
- 4. A 0 1 t .dtstA.t.e 0 F(s) − ∫ ∞ = 2s A 0 .dtste s A dt 0 s stA.e 0 | s ste A.t. 0 .dtst-t.eA = ∫ ∞ −= ∫ ∞ − − −∞ − − = ∫ ∞ = E. Fungsi Eksponensiil F(t) = o untuk t < 0 = A αte− untuk t ≥ 0 F(s) ∫ ∞ −−= 0 .dtst.eαtA.e αs A 1)(0 αs A 0 | α)t(s e αs A 0 .dt s)t(α eA + = − + −= ∞+− + −= ∫ ∞ +− = F. Fungsi Sinus f(t) = A sin ωt ∫ ∞ −= 0 .dtstA.sinω.siF(s)
- 5. 22 22 ωs ω A. ωs jωsjωs . 2j A ] jωs 1 jωs 1 [ 2j A 0 ] s)t(jω e sjω 1s)t(jω e sjω 1 [ 2j A 0 )dt s)t(jω e s)t(jω (e 2j A 0 )dtst.e tj est.e tj (e 2j A dt 0 st.e 2j tj e tj e A. + = + +−+ = + − − = ∞+− + + − − = ∫ ∞ +− − − = ∫ ∞ −− −−= ∫ ∞ − − − = ωω ωω G. Fungsi Cosinus f(t) = A cos ωt F(s) = A. 22 ωs s + TEOREMA-TEOREMA TRANSFORMASI LAPLACE 1. Teorema Translasi Bila F(s) = L [ f(t) ], Maka L [f (t - α)] = .F(s)α.se− Bukti : L [ f ( t - α ) ] ∫ ∞ −−= 0 .dtstα)ef(t
- 6. .F(s)αse 0 dtstf(t).eαse α dτsτf(τ(τ)αse α dτsτf(τ(τ 0 α)s(t .eαsα)ef(t −= ∫ ∞ −−= ∫ ∞ − −−= ∫ ∞ − −= ∫ ∞ −−−−= 2. Teorema Perkalian Dengan αte− Bila F(s) = L [ f(t) ], Maka : L [ αte− .f(t) ] = F ( s + α ) Bukti : L [ αte− .f(t) ] = ∫ ∞ −− 0 .dtstf(t)eαte α)F(s 0 .dt α)t(s f(t).e += ∫ ∞ +− = 3. Teorema Diferensiasi Bila F(s) = L [ f(t) ], Maka : L [ dt df(t) ] = sF(s) – f(0) Dimana f(0) adalah harga f(t) untuk t=0 L [ 2dt f(t)2d ] = s2 F(s) - sf(0) – fI (0) L [ 3dt f(t)3d ] = s3 F(s) – s2 f(0) – sfI (0) – fii (0) Bukti : L [ dt df(t) ] = ∫ ∞ − 0 .dtst)e dt df(t) ( sF(s)f(0) 0 dtstf(t).esf(0)0 0 stf(t)de 0 |.f(t)ste df(t) 0 ste +−= ∫ ∞ −+−= ∫ ∞ −−∞−= ∫ ∞ −= 4. Teorema Integrasi
- 7. Bila F(s) = L [ f(t) ], Maka : L [ ∫f(t)dt ] = s (0)1f s F(s) − + Dimana f-1 (0) adalah ∫f(t)dt untuk t = 0 Bukti : L [ ∫f(t)dt ] ∫ ∞ ∫ −= 0 dtstf(t)dt]e[ s (0)1f s F(s) F(s)](0)1f[0 s 1 ] 0 f(t)dtste 0 |f(t)dtst[e s 1 0 stf(t)dt]de[ s 1 − += −−−−= ∫ ∫ ∞ −−∞−−= ∫ ∞ ∫ −−= ∴ L [ ∫∫ f(t)dt)dt( ] = s (0)iif 2s (0)if 2s F(s) − + − + 5. Teorema Harga Awal Dan Harga Akhir A. sF(s) s limf(t) 0t lim ∞→ = → B. sF(s) 0s limf(t) t lim → = ∞→ Bukti : A. ∫ ∞ =− ∞→ 0 0dtst]e dt df(t) [ s lim 0f(0)sF(s) s lim =− ∞→ sF(s) s limf(t) 0t limf(0) ∞→ = → = B. f(0)][sF(s) 0s lim] dt df(t) L[ 0s lim − → = → f(0)sF(s) 0s lim − → = karena 1ste 0s lim =− → ∫ ∞ ∞= 0 0 |f(t)]dt dt df(t) [
- 8. f(0)-sF(s) 0s lim f(0))f( → = −∞= ∴ sF(s) 0s limf(t) t lim)f( → = ∞→ =∞ INVERSI TRANSFORMASI LAPLACE Untuk mencari fungsi waktu f(t) dari transformasi laplacenya L-I [ F(s) ] = f(t) Metode Ekspansi Pembagian Parsial (Partial Fraction Expantion) F(s) = F1(s) + F2(s) + ….. + Fn(s) L-I [ F(s) ] = L-I [ F1(s) ] + L-I [ F2(s) ] + ….. + L-I [ Fn(s) ] F(t) = f1(t) + f2(t) + ….. + fn(t) Contoh : 1. F(s) = 2)1)(s(s 3s ++ + F(s) = 2)1)(s(s 3s ++ + = 2s a 1s a 21 + + + a1 = 2 1s 1)](s 2)1)(s(s 3s [ = −= + ++ + a2 = 1 2s 2)](s 2)1(s(s 3s [ −= −= + ++ + f(t) = L-1 [ F(s) ] = L-1 [ 1s 2 + ] + L-1 [ 2 1 + − s ] = 2. 2tete −−− 2. G(s) = 2)1)(s(s 79s5ss 23 ++ +++ G(s) = s + 2 + 2)1)(s(s 3s ++ + G(t) = 2tet2e(t)2δ(t) dt d −−−++ δ 3. F(s) = 1)ss(s 1s 2 ++ + F(s) = 1)ss(s 1s 2 ++ + = s a 1s2s 2 αs 1 α + ++ + Untuk mendapatkan α1 dan α2 : 1)ss(s 1s 2 ++ + = s a 1s2s 2 αs 1 α + ++ +
- 9. 1)ss(s 1s 2 ++ + = 1s2s 2 αs 1 α ++ + 1)ss(s 1s 2 ++ + . s2 + s + 1 = j0,8660,5s | 2 αs 1 α −−= + 2 αj0,866)0,5( 1 α j0,8660,5 j0,8660,5 +−−= −− − 0,5 – j0.866 = α1 (0,25 + j0,866 – 0,75) + α2 (-0,5 – j0,866) Real : 0,5 = -0,5α1 – 0,5α2 → α1 + α2 = -1 Imajiner : -0,866 = 0,866α1 – 0,866α2 → α1 + α2 = -1 α1 = -1 , α2 = 0 Untuk mendapatkan a : 1 0s ] 1)s2s(s 1)s(s [a = = ++ + = F(s) = s 1 1s2s s + ++ − = 20,86620,5)(s 0,5 2o,86620,5)(s 0,5s s 1 ++ + ++ + − f(t) = L-1 [ F(s) ] = 1 – sin0,866t0,5t0,578ecos0,866t0,5te −+ 4. F(s) = 31)(s 32s2s + ++ F(s) = 1)(s b1 21)(s b2 31)(s b3 + + + + + b3 = [ 31).(s 31)(s 32s2s + + ++ ]s= -1 = (s2 + 2s + 3)s= -1 = 2 b2 = 1s ]}31).(s 31)(s 32s2s [ ds d { 1! 1 −= + + ++ = (2s +2)s= -1 = 0 b1 = 1s ]}31).(s 31)(s 32s2s [ 2ds 2d { 2! 1 −= + + ++ = ½ . (2) = 1 f(t) = L-1 [ F(s) ]
- 10. = L-1 [ 31)(s 2 + ] + L-1 [ 1s 1 + ] = t2 . e-t + e-t SOAL LATIHAN 1. F(s) = 65s2s 1s ++ + →f(t) = … ? 2. F(s) = 5)s23)(s(s31)(s 2)5(s ++++ + →f(t) = … ? 3. f(t) = A cos (ωt + ϕ) →F(s)= … ? 4. f(t) = 0 untuk t < 0 & t > 2T -A untuk 0 ≤ t < T → F(s) = … ? A untuk T ≤ t ≤ 2T 5. A → F(s) = … ? T 2T t
- 11. PENYELESAIAN PERSAMAAN DIFFERENSIAL Contoh : 1. Selesaikan persamaan differensial berikut : 3(0) . x0,x(0)0,6x . x3 .. x ===++ Transformasi laplace dari persamaan differential diatas menghasilkan : s2 X(s) – sx(0) - . x (0) + 3(sX(s) – x(0)) + 6X(s) = 0 s2 X(s) – 0 – 3 + 3 (sX(s) – 0) + 6X(s) = 0 X(s) (s2 + 3s + 6) = 3 X(s) = 63s2s 3 ++ Untuk mendapatkan x(t) : X(s) = 6 4 9 4 9 3ss 3 2 +−++ = 15/43/2)(s 3 2 ++ = 22 )15 2 1 (3/2)(s 3 ++ = 22 )15(1/23/4)(s 151/2 15 6 ++ ∴ x(t) = )t]15.Sin[(1/23/2te15 5 2 −