![[ ]kxtEE yy −+= 10cos ϕω
z x
y
o[ ]kxtEE zz −+= 20cos ϕω
12 ϕϕϕ∆ −=
0=∆ϕ
4
π
=∆ϕ
2
π
=∆ϕ
4
π3
=∆ϕ π=∆ϕ
4
π3
−=ϕ∆
4
π
−=ϕ∆
2
π
−=ϕ∆
00 yz EE =
椭圆偏振光
圆偏振光
返回 退出
CAI
π−=ϕ∆
π0 ±≠ ,ϕ∆
2
π
±=ϕ∆](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
More from Tianlu Wang
More from Tianlu Wang (20)
Phy b14 3
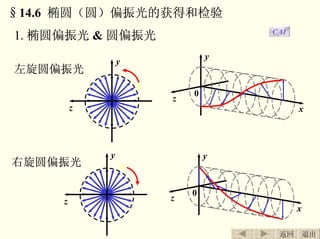
- 1. §14.6 椭圆(圆)偏振光的获得和检验 1. 椭圆偏振光 & 圆偏振光 CAI y x z 0 y z 左旋圆偏振光 y z 右旋圆偏振光 y x z 0 退出返回
- 2. [ ]kxtEE yy −+= 10cos ϕω z x y o[ ]kxtEE zz −+= 20cos ϕω 12 ϕϕϕ∆ −= 0=∆ϕ 4 π =∆ϕ 2 π =∆ϕ 4 π3 =∆ϕ π=∆ϕ 4 π3 −=ϕ∆ 4 π −=ϕ∆ 2 π −=ϕ∆ 00 yz EE = 椭圆偏振光 圆偏振光 返回 退出 CAI π−=ϕ∆ π0 ±≠ ,ϕ∆ 2 π ±=ϕ∆
- 3. tEEz ωcos0= ) 2 cos(0 π ω += tEEy z y E r ω 返回 退出 圆偏振光可分解为两束振动方向相互垂直、等幅、相 位差为 的线偏振光。2/π 右旋圆偏振光 左旋圆偏振光 tEEz ωcos0= ) 2 cos(0 π ω −= tEEy z y E r ω
- 4. ( ) …±±=+=− ,,, 210 2 1212 nnrr λ 12 ϕϕ = ( ) ( )1212 2 rrrrk −=−= λ π ϕ∆ …±±==− ,,, 21012 nnrr λ ( )2121 rrk −−−= ϕϕϕ∆ 波程差 干涉加强 干涉减弱 返回 退出 P r2 r1 S1 S2 • • 1l 2l 3l nl 1n 2n 3n nn 1S P 2. 光程
- 5. 单色光波的频率 (周期 )在不同的介质中是恒定 不变的 f T nnf c f v λ λ ===′ n c v =介质内 πλ 2↔′ ϕ∆↔x λ π λ πϕ∆ nxx 22 = ′ = nx 光程 光波在介质中的路程 相当于在真空中的路程x nx 退出返回
- 6. 1S 2S P d d x ϕ ϕ 1ϕ 2ϕn kd=− 1ϕϕ )(2 nxxdk +−=− ϕϕ )(21 xnxk −=−= ϕϕϕ∆ 光程差 λ π xnx − = 2 λ δ π2= 引入光程的概念后,我们就可以把光在不同介质中的 传播都折算为光在真空中的传播。 退出返回
- 7. • • 1l 2l 3l nl 1n 2n 3n nn 1S P ∑∑ == i ii i i i c ln v l t ∑== i iilnctL 两束相干光(从同相点算起)在相遇点处由于它们经 过不同的光程所产生的相位差可用光程差来写出。 λ δ πϕ 2=∆ 退出返回
- 8. 3. 波片 由晶体做成的有准确厚度的平行板,光轴与表面平行 α 光轴 eA oA A r d M N o光 e光 α 光轴 A r oA r eA r e光、 o光的振幅 α α sin cos AA AA o e = = 退出返回
- 9. M N o光 e光 α 光轴 eA oA A r d α 光轴 A r oA r eA r 通过厚度为d 的波片, e光与 o光产生光程差 dndn oe −=δ dndn oe −== λ π δ λ π ϕ∆ 22 对应的相位差 返回 退出
- 10. α 光轴 P A r oA r eA r(1) 四分之一波片 2 π ϕ∆ = 4 λ δ =−= dndn oe 线偏振光 椭圆或圆偏振光 4 π α = 线偏振光→圆偏振光 2 ,0 π α = CAI 线偏振光→线偏振光 24 0 ππ α ,,≠ 线偏振光→椭圆偏振光 退出返回
- 11. (2) 二分之一波片 αα A0入A0出 A入A出 Ae入= Ae出光轴 2 λ δ =−= dndn oe πϕ∆ = CAI 使线偏振光振动面转过2α 角度 0=∆ϕ 4 π =∆ϕ 2 π =∆ϕ 4 π3 =∆ϕ π=∆ϕ 4 π3 −=ϕ∆ 4 π −=ϕ∆ 2 π −=ϕ∆ 退出返回
- 13. P 自然光 线偏 P 圆偏 线偏 转动偏振片,光强无变化 转动偏振片,光强无变化 P 自然光 自然光 线偏 λ/ 4 λ/ 4 P 圆偏 线偏 线偏 转动偏振片,光强有变化, 且存在消光位置。 转动偏振片,光强无变化 CAI 退出返回
- 14. P 椭偏 线偏 P 部分偏 线偏 转动偏振片,光强有变 化,不存在消光位置 转动偏振片,光强有变 化,不存在消光位置 P 部分偏 部分偏 线偏 λ/ 4 λ/ 4 P 正椭偏 线偏 线偏 转动偏振片,光强有变化, 存在消光位置。 转动偏振片,光强有变 化,不存在消光位置 CAI 退出返回
- 15. 四 分 之 一 波 片 圆偏振光 自然光 各种偏振态 的光 线偏振光 偏 振 片 转 动 线偏振光 I 不变 线偏振光 I 变, 有消光 以入射光方向为轴 四 分 之 一 波 片 椭圆偏振光 部分偏振光 线偏振光 偏 振 片 ( 转 动 ) 线偏振光 I 变, 有消光 各种偏振态 的光 线偏振光 I 变, 无消光 CAI 光轴平行椭圆偏振光的长轴或短轴放置 退出返回