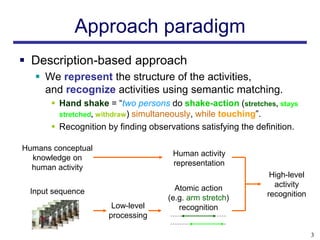
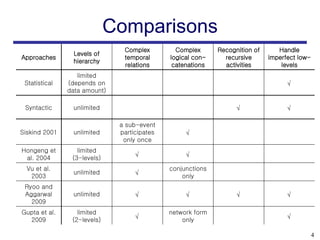
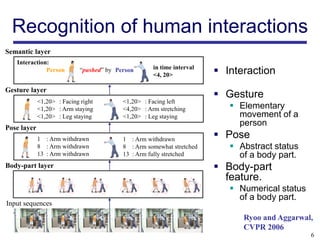
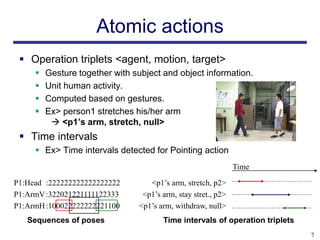
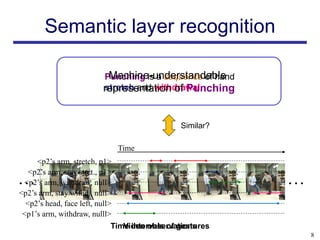
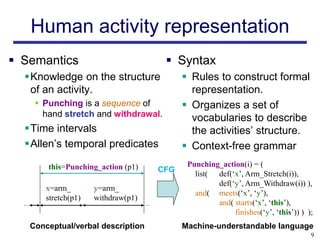
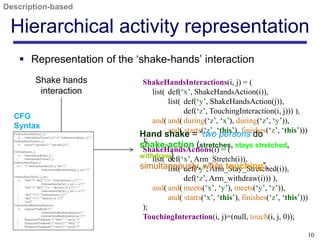
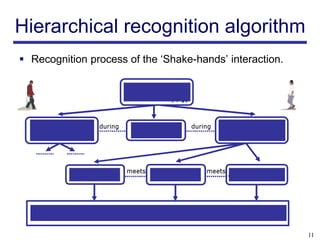
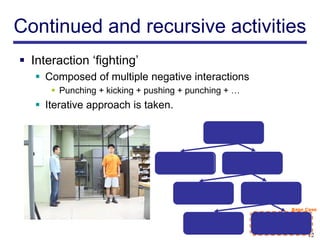
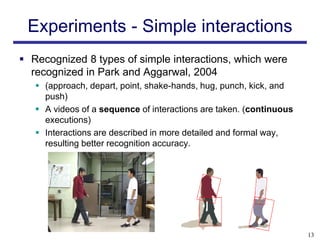
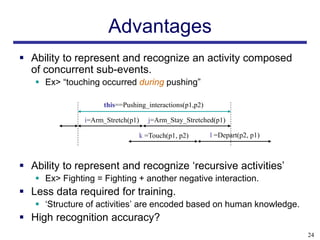
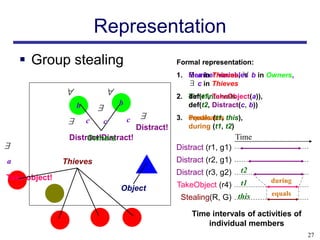
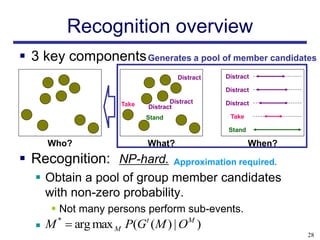
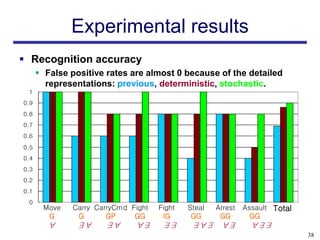
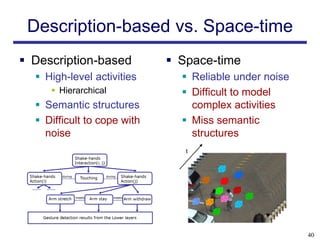
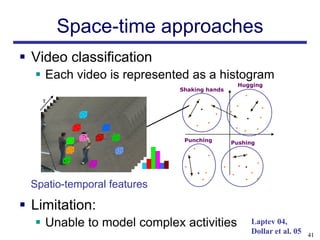
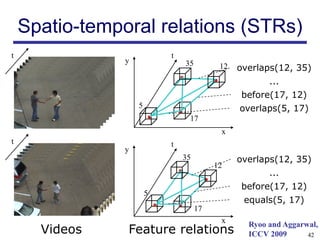
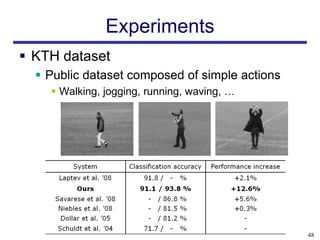
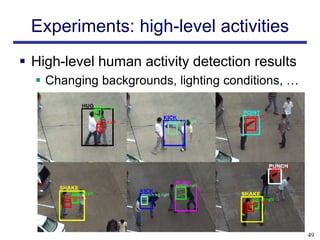
This document discusses description-based approaches for analyzing human activities. It describes representing activities semantically using definitions of their structures, and recognizing activities by matching observations to these definitions. It also discusses hierarchical representations of both simple and complex/recursive activities like interactions between multiple people. Recognition algorithms work by matching video observations to the formal syntactic representations of activities. Experiments demonstrated recognizing a variety of simple interactions between people from continuous video sequences.
![Past-Now-Future networks
Pinhanez and Bobick 1998
PNF networks to represent temporal structure
of an activity.
Kitchen activities:
[Pinhanez, C. S. and Bobick, A. F., Human action detection using PNF propagation
of temporal constraints. CVPR 1998]
15](https://image.slidesharecdn.com/tutorialcvpr2011descriptionbasedpdf3850/85/cvpr2011-human-activity-recognition-part-5-description-based-15-320.jpg)
![Event logic
Siskind 2001
Logical concatenations of predicates
Time intervals?
[Siskind, J. M., Grounding the lexical semantics of verbs in visual perception using force
dynamics and event logic. Journal of Artificial Intelligence Research (JAIR) 15, 2001]
16](https://image.slidesharecdn.com/tutorialcvpr2011descriptionbasedpdf3850/85/cvpr2011-human-activity-recognition-part-5-description-based-16-320.jpg)
![Stochastic approaches
Limitations of the conventional description-
based approaches
Uncertainties? – stochastic recognition
Probabilistic framework needed
[Ryoo and Aggarwal, IJCV 2009]
[Tran and Davis, ECCV 2008] - MLN
18](https://image.slidesharecdn.com/tutorialcvpr2011descriptionbasedpdf3850/85/cvpr2011-human-activity-recognition-part-5-description-based-18-320.jpg)

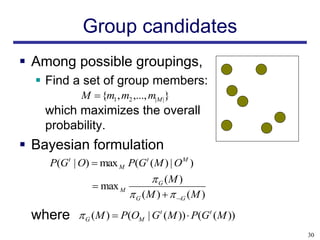
![Bayesian formulation
Ci: persons performing ith sub-event.
P(OM | G t ( M )) P(OM | M , Q, S1t1 ,..., S n ) P( S1t1 ,..., Sn | G t ( M ))
tn tn
S11 ,...,S nRepresented
t tn
relations Represented sub-events
P(rel | S a , Sb ) P( Siti | G t ( M ))
rel
G (M ) i
t1 tn
S1 ,...,S n
d e (| Ki Ci |/|Ki ||Li Ci |/|Ki |) G t ( M )
i
Structural similarity
Essential and anti-essential relations: Ki, Li
E[S
Case1: Case2:
| Ki Ci | i
ti
(k ) | O ] i
∃∃ 1
2
4
5
∀∃ 1
2
4
5
kK i Ci 3 6 3 6
Case3: Case4:
| Li Ci | E[S (l ) | O ]
lLi Ci
i
ti i ∃∀ 1
2
3
4
5
6
∀∀ 1
2
3
4
5
6
31](https://image.slidesharecdn.com/tutorialcvpr2011descriptionbasedpdf3850/85/cvpr2011-human-activity-recognition-part-5-description-based-31-320.jpg)




















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
















