Download to read offline

















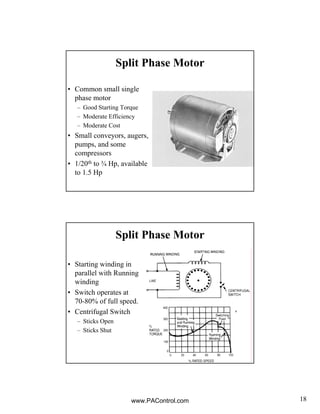


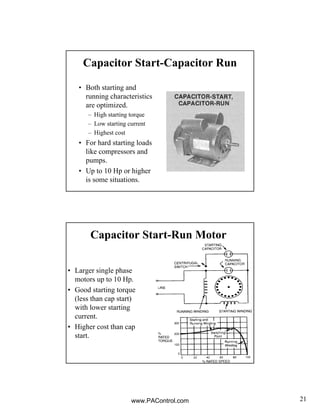



Motors convert electrical energy to mechanical energy while engines convert chemical energy. The document discusses various motor types including their parts, operating principles, advantages, disadvantages and applications. It covers synchronous and induction motors, single phase motors like split phase, capacitor run and start motors. NEMA motor design types A-E are described for different starting and operational needs.






































































































