Download to read offline

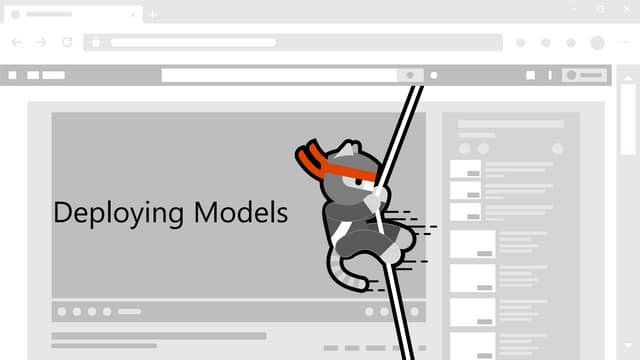
![Defining a search space
The set of hyperparameter values tried during hyperparameter tuning is known as
the search space. The definition of the range of possible values that can be chosen
depends on the type of hyperparameter.
Discrete hyperparameters
Some hyperparameters require discrete values - in other words, you must select the value
from a particular set of possibilities. You can define a search space for a discrete
parameter using a choice from a list of explicit values, which you can define as a
Python list (choice([10,20,30])), a range (choice(range(1,10))), or an arbitrary set of comma-
separated values (choice(30,50,100))](https://image.slidesharecdn.com/c8-trainingoptimalmodels-221105045844-c22a082e/75/Training-Optimal-Models-4-2048.jpg)


The document discusses hyperparameter tuning in machine learning, specifically using Azure Machine Learning to optimize model performance through multiple training runs with varying hyperparameters. It explains defining search spaces for discrete and continuous hyperparameters, and emphasizes the importance of configuring sampling and early termination policies to improve efficiency during the tuning process. It also provides links and references for further information.












































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)













