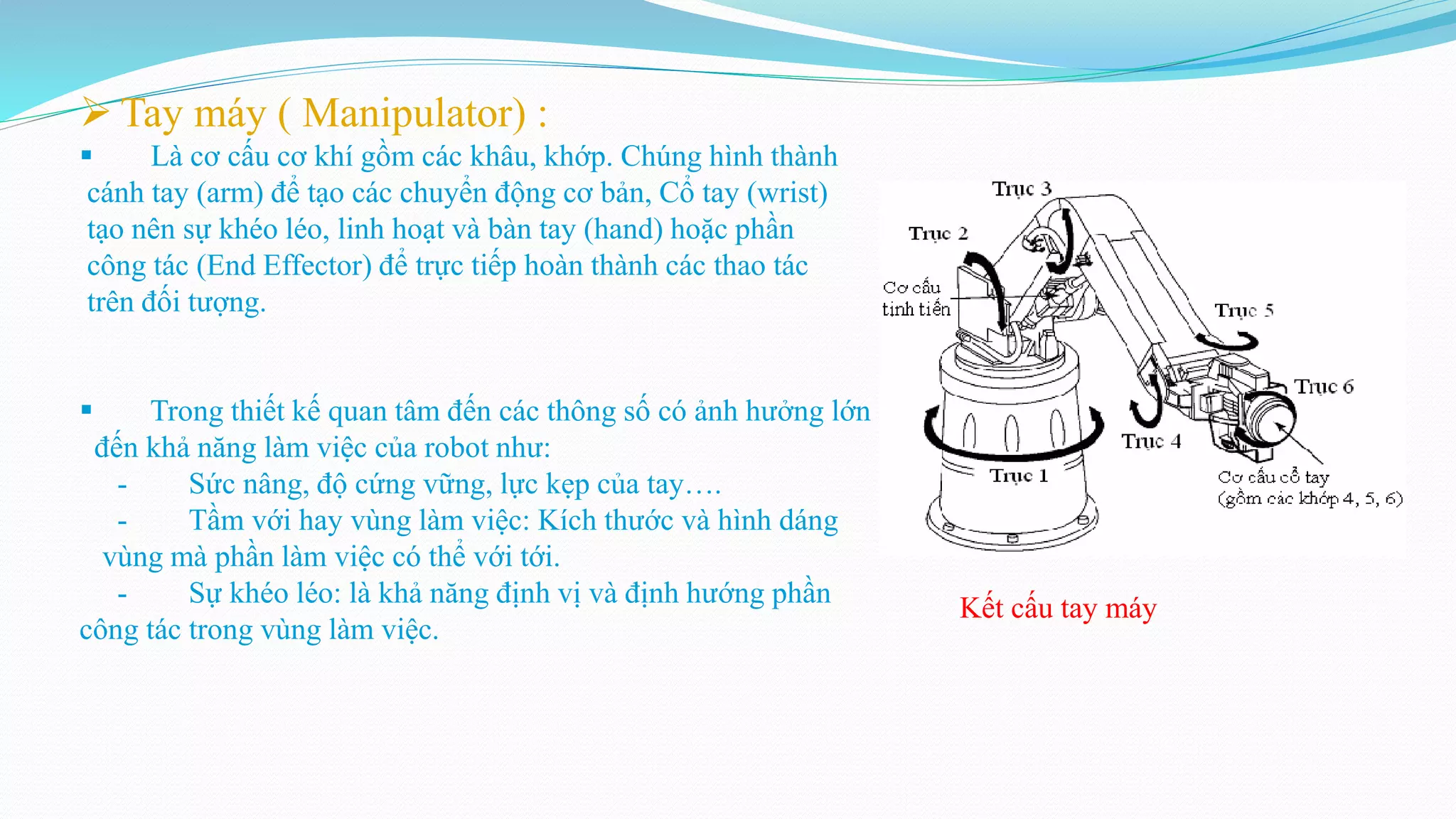
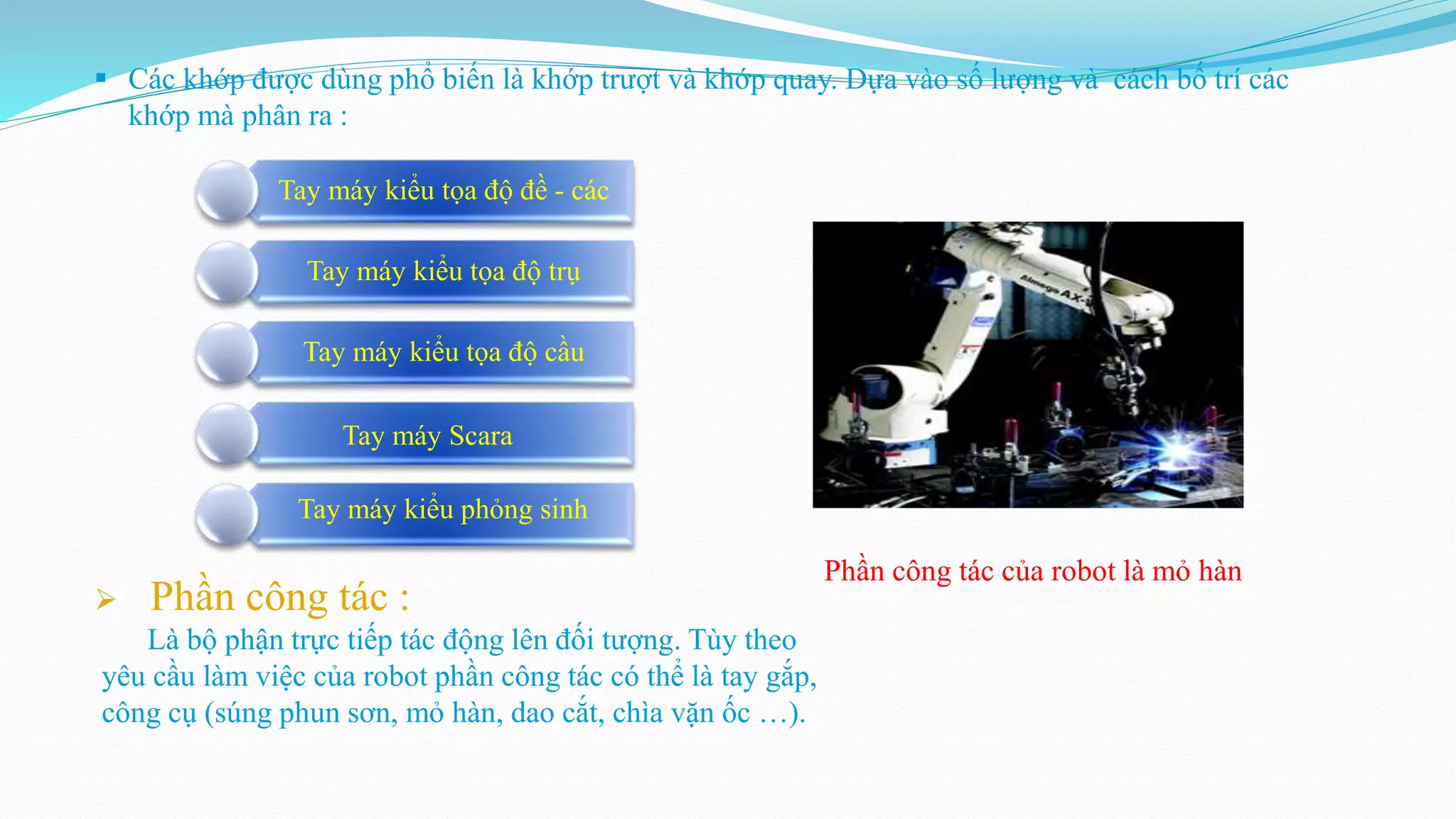
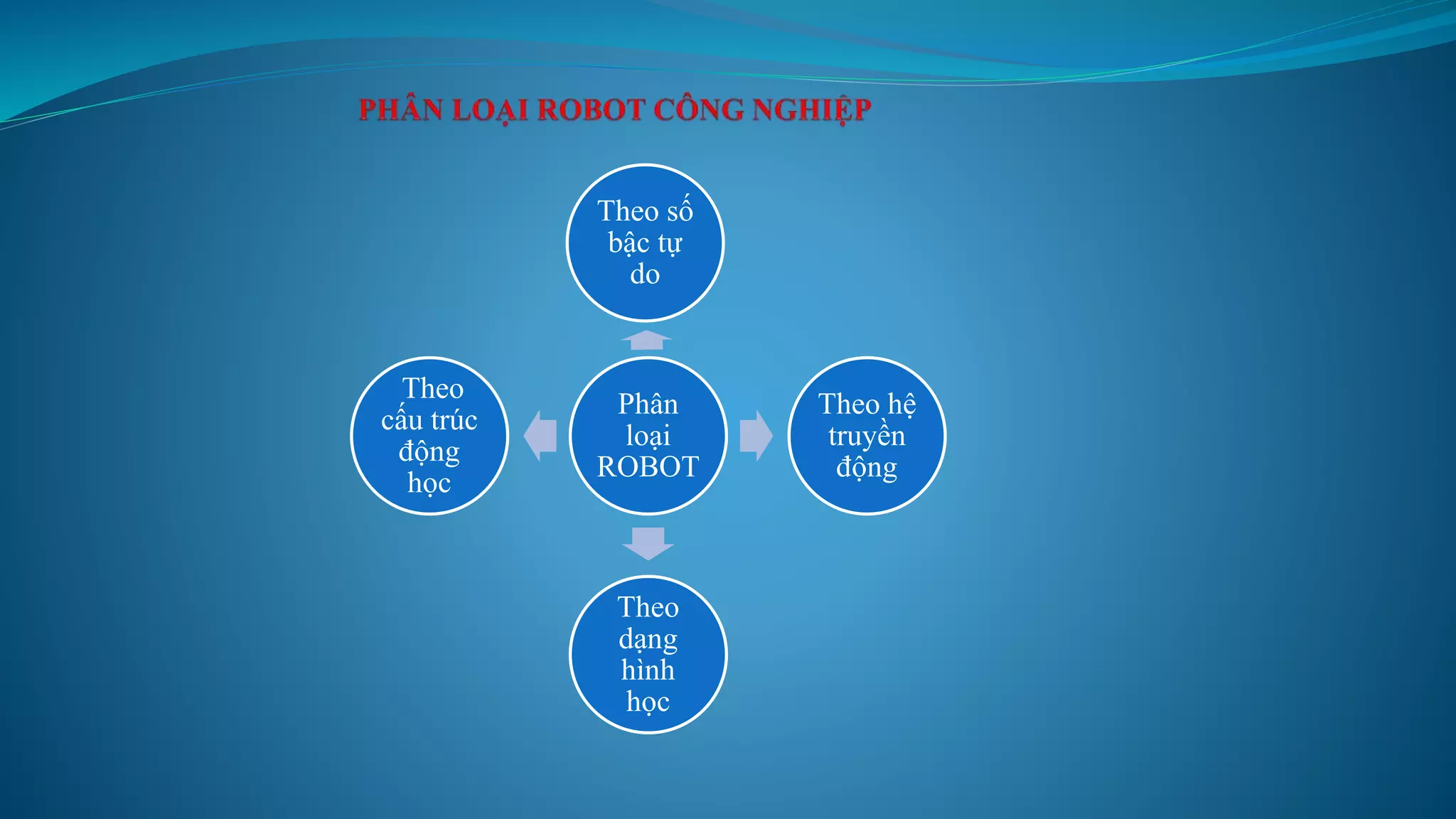
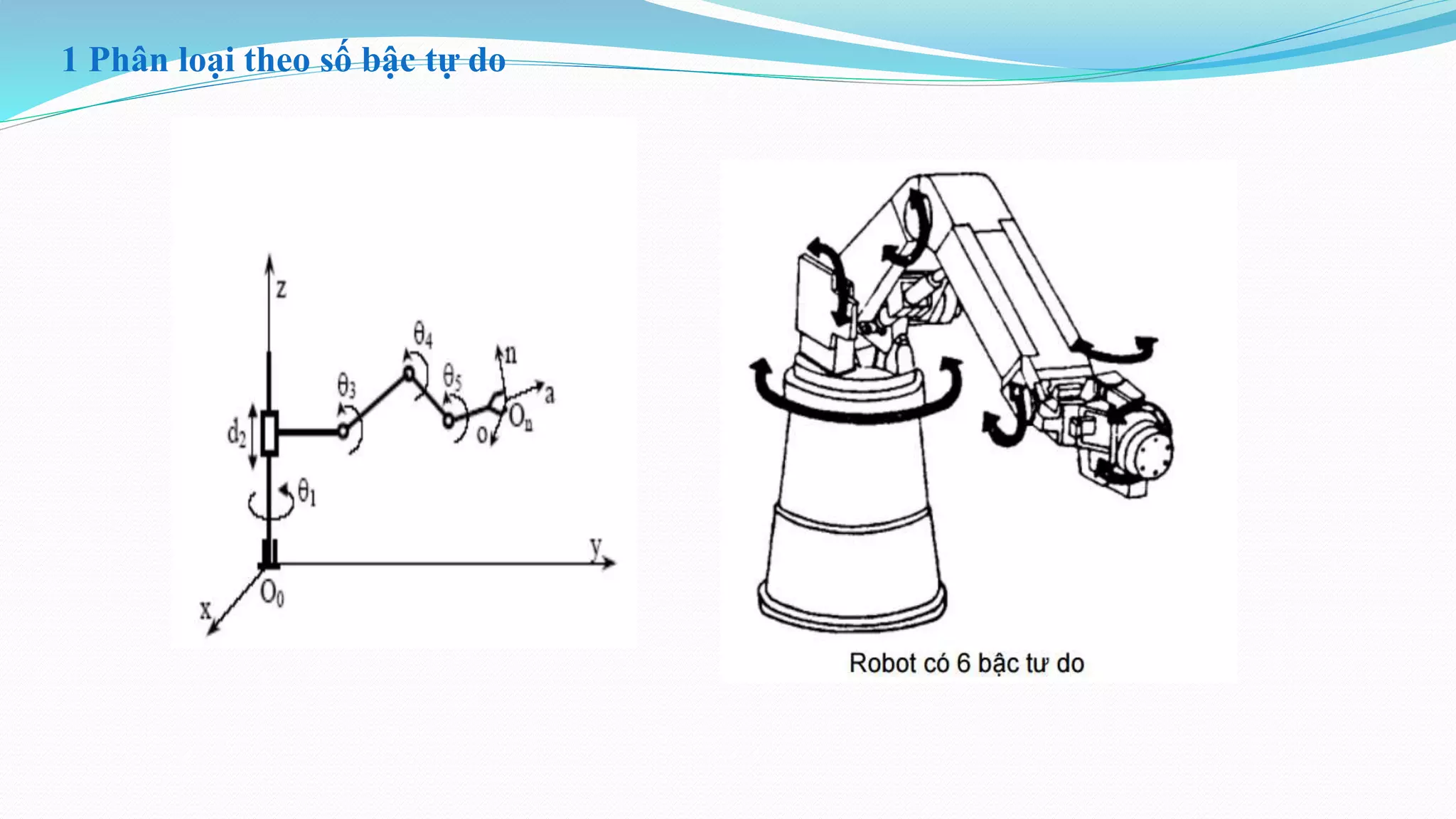
Tài liệu tập trung vào robot công nghiệp trong hệ thống FMS, gồm lịch sử phát triển, định nghĩa, cấu tạo và chức năng của các thành phần như tay máy, cảm biến và hệ thống điều khiển. Robot công nghiệp được định nghĩa là cơ cấu máy tự động lập trình được, có khả năng làm việc mà không cần sự trợ giúp của con người. Tài liệu cũng đề cập đến các loại động cơ, hệ truyền động và phân loại robot dựa trên số bậc tự do, hệ truyền động và cấu trúc động học.