Download to read offline










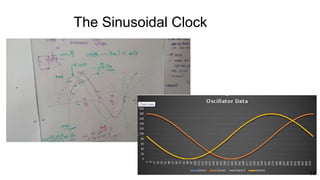
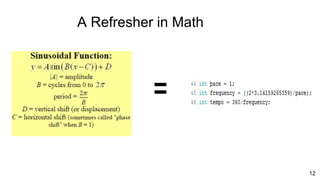
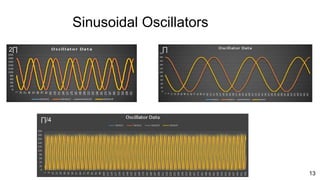

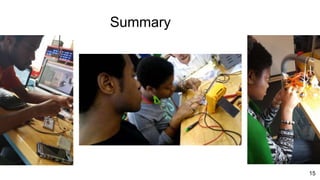





This document discusses the design of a quadruped robot that walks like a dog using central pattern generators. It first provides background on existing quadruped robots as inspiration. It then discusses canine anatomy and includes sketches of a potential robot design. The main component discussed is using central pattern generators, which are groups of neurons in the spine that output rhythmic signals to muscles without external input to control walking. The document describes experiments using oscillators and sinusoidal clocks in software to simulate central pattern generators and get a turtle and penguin robot to walk. It concludes by reflecting on lessons learned from the project around failures and communication challenges.



























