Simulazione dei comportamenti di guida
•
0 likes•319 views

La modellizzazione del comportamento di guida è il cuore della simulazione di traffico. I modelli del movimento dei veicoli sono la chiave per riprodurre le dinamiche in modo realistico.
Recommended

Recommended
More Related Content
Viewers also liked
Viewers also liked (8)
Simulazione dei comportamenti di guida
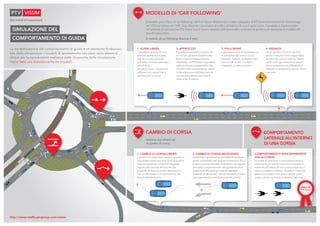
- 1. 1. GUIDA LIBERA Il guidatore avanza alla sua velocità desiderata a patto che non vi siano ostacoli di fronte, come per esempio: veicoli lenti, semaforo rosso, o potenziali collisioni con veicoli che si spostano fra le corsie. http://vision-traffic.ptvgroup.com/vissim 2. APPROCCIO Il guidatore avverte la presenza di un veicolo più lento davanti a sé e frena in base al distanziamento desiderato. In PTV Vissim è possibile definire diverse caratteristiche del veicolo e del conducente (es. tasso di decelerazione nell’avvicinarsi al veicolo precedente) per diverse classi e tipi di veicoli. 3. FOLLOWING Il guidatore cerca di mantenere la sua distanza dal veicolo che lo precede. Tuttavia, la distanza fra i due veicoli oscilla – a volte è maggiore, a volte è minore. 4. FRENATA Se un veicolo riduce la velocità, anche il veicolo che lo segue deve frenare. Per ciascun veicolo, Vissim verifica ad ogni instante di simula- zione la distanza e la differenza di velocità in relazione al veicolo che lo precede. SIMULAZIONE DEL COMPORTAMENTO DI GUIDA La modellizzazione del comportamento di guida è un elemento fondamen- tale della simulazione. I modelli di spostamento veicolare sono elementi chiave per la riproduzione realistica delle dinamiche della circolazione. Viene fatta una distinzione fra tre modelli: Il modello psico-fisico di ‘car following’ del Prof. Rainer Wiedemann è stato sviluppato al KIT (Karlsruhe Institute for Technology) nel 1974 ed esteso nel 1999. Esso descrive i movimenti di traffico all’interno di una singola corsia. Il modello è implementato nel software di simulazione PTV Vissim e può essere adattato dall’utente alle condizioni di guida locali attraverso la modifica di specifici parametri. Il modello di car following descrive 4 stati: MODELLO DI ‘CAR FOLLOWING’ CAMBIO DI CORSIA Esistono due diversi tipi di cambio di corsia: COMPORTAMENTO NON DIPENDENTE DALLA CORSIA La scelta di posizione in una corsia è sempre importante se i veicoli riescono a sorpassarsi restando all’interno di una corsia e riescono a stare uno affianco all’altro. Questo è il caso dei percorsi promiscui con auto e veicoli a due ruote o di alcune strade in determinate aree. 1. CAMBIO DI CORSIA LIBERO Il cambio di corsia libero avviene quando si sorpassano veicoli più lenti (cioè quando la velocità desiderata propria è maggiore rispetto alla velocità del veicolo che precede). È necessario fare attenzione a non condizionare il comportamento dei veicoli nell’altra corsia. 2. CAMBIO DI CORSIA NECESSARIO Avviene se il guidatore ha necessità di cambiare corsia, ad esempio per seguire un itinerario. Più si avvicina al punto di scelta di itinerario, più aggres- sivo sarà il comportamento del guidatore che si prepara ad affrontare gli ostacoli dati dalla presenza di altri veicoli. I veicoli adiacenti collabo- rano agevolando il cambio corsia del veicolo. ONLY IN PTV Vissim COMPORTAMENTO LATERALE ALL’INTERNO DI UNA CORSIA