Recent Advances In Signal Processing Ashraf A Zaher
Recent Advances In Signal Processing Ashraf A Zaher
Recent Advances In Signal Processing Ashraf A Zaher
Recent Advances In Signal Processing Ashraf A Zaher
Recent Advances In Signal Processing Ashraf A Zaher
1.
Recent Advances InSignal Processing Ashraf A
Zaher download
https://ebookbell.com/product/recent-advances-in-signal-
processing-ashraf-a-zaher-2264736
Explore and download more ebooks at ebookbell.com
2.
Here are somerecommended products that we believe you will be
interested in. You can click the link to download.
Recent Advances In Multimedia Signal Processing And Communications 1st
Edition Rastislav Lukac Auth
https://ebookbell.com/product/recent-advances-in-multimedia-signal-
processing-and-communications-1st-edition-rastislav-lukac-auth-2180624
Recent Advances In Intelligent Information Hiding And Multimedia
Signal Processing Proceeding Of The Fourteenth International
Conference On Intelligent Information Hiding And Multimedia Signal
Processing November 2628 2018 Sendai Japan Volume 1 1st Ed Jengshyang
Pan
https://ebookbell.com/product/recent-advances-in-intelligent-
information-hiding-and-multimedia-signal-processing-proceeding-of-the-
fourteenth-international-conference-on-intelligent-information-hiding-
and-multimedia-signal-processing-november-2628-2018-sendai-japan-
volume-1-1st-ed-jengshyang-pan-7321366
Recent Advances In Intelligent Information Hiding And Multimedia
Signal Processing Proceeding Of The Fourteenth International
Conference On Intelligent Information Hiding And Multimedia Signal
Processing November 2628 2018 Sendai Japan Volume 2 1st Ed Jengshyang
Pan
https://ebookbell.com/product/recent-advances-in-intelligent-
information-hiding-and-multimedia-signal-processing-proceeding-of-the-
fourteenth-international-conference-on-intelligent-information-hiding-
and-multimedia-signal-processing-november-2628-2018-sendai-japan-
volume-2-1st-ed-jengshyang-pan-7321368
Recent Advanced In Image Security Technologies Intelligent Image
Signal And Video Processing Hang Chen
https://ebookbell.com/product/recent-advanced-in-image-security-
technologies-intelligent-image-signal-and-video-processing-hang-
chen-49119624
3.
Recent Advances InControl And Filtering Of Dynamic Systems With
Constrained Signals 1st Ed Ju H Park
https://ebookbell.com/product/recent-advances-in-control-and-
filtering-of-dynamic-systems-with-constrained-signals-1st-ed-ju-h-
park-7324008
Recent Advances In Thin Film Photovoltaics Udai P Singh Nandu B Chaure
https://ebookbell.com/product/recent-advances-in-thin-film-
photovoltaics-udai-p-singh-nandu-b-chaure-45335492
Recent Advances In Distillery Waste Management For Environmental
Safety Vineet Kumar
https://ebookbell.com/product/recent-advances-in-distillery-waste-
management-for-environmental-safety-vineet-kumar-46162998
Recent Advances In Recycling Engineering Proceedings Of The
International Conference On Advances And Innovations In Recycling
Engineering Air2021 N A Siddiqui
https://ebookbell.com/product/recent-advances-in-recycling-
engineering-proceedings-of-the-international-conference-on-advances-
and-innovations-in-recycling-engineering-air2021-n-a-siddiqui-46180886
Recent Advances In Materials Technologies Select Proceedings Of Icemt
2021 K Rajkumar
https://ebookbell.com/product/recent-advances-in-materials-
technologies-select-proceedings-of-icemt-2021-k-rajkumar-46222686
V
Preface
The signal processingtask is a very critical issue in the majority of new technological in-
ventions and challenges in a variety of applications in both science and engineering fields.
Classical signal processing techniques have largely worked with mathematical models that
are linear, local, stationary, and Gaussian. They have always favored closed-form tractability
over real-world accuracy. These constraints were imposed by the lack of powerful computing
tools. During the last few decades, signal processing theories, developments, and applications
have matured rapidly and now include tools from many areas of mathematics, computer
science, physics, and engineering. This was mainly due to the revolutionary advances in the
digital technology and the ability to effectively use digital signal processing (DSP) that rely on
the use of very large scale integrated technologies and efficient computational methods such
as the fast Fourier transform (FFT). This trend is expected to grow exponentially in the future,
as more and more emerging technologies are revealed in the fields of digital computing and
software development.
It is still an extremely skilled work to properly design, build and implement an effective sig-
nal processing tool able to meet the requirements of the increasingly demanding and sophis-
ticated modern applications. This is especially true when it is necessary to deal with real-time
applications of huge data rates and computational loads. These applications include image
compression and encoding, speech analysis, wireless communication systems, biomedical
real-time data analysis, cryptography, steganography, and biometrics, just to name a few.
Moreover, the choice between whether to adopt a software or hardware approach, for imple-
menting the application at hand, is considered a bottleneck. Programmable logic devices, e.g.
FPGAs provide an optimal compromise, as the hardware configuration can be easily tailored
using specific hardware descriptive languages (HDLs).
This book is targeted primarily toward both students and researchers who want to be ex-
posed to a wide variety of signal processing techniques and algorithms. It includes 27 chap-
ters that can be categorized into five different areas depending on the application at hand.
These five categories are ordered to address image processing, speech processing, commu-
nication systems, time-series analysis, and educational packages respectively. The book has
the advantage of providing a collection of applications that are completely independent and
self-contained; thus, the interested reader can choose any chapter and skip to another with-
out losing continuity. Each chapter provides a comprehensive survey of the subject area and
terminates with a rich list of references to provide an in-depth coverage of the application at
hand. Understanding the fundamentals of representing signals and systems in both time, spa-
tial, and frequency domains is a prerequisite to read this book, as it is assumed that the reader
is familiar with them. Knowledge of other transform methods, such as the Laplace transform
10.
VI
and the Z-transform,along with knowledge of some computational intelligence techniques
is an assist. In addition, experience with MATLAB programming (or a similar tool) is useful,
but not essential. This book is application-oriented and it mainly addresses the design, imple-
mentation, and/or the improvements of existing or new technologies, and also provides some
novel algorithms either in software, hardware, or both forms. The reported techniques are
based on time-domain analysis, frequency-domain analysis, or a hybrid combination of both.
This book is organized as follows. The first 14 chapters investigate applications in the field of
image processing, the next six chapters address applications in speech and audio processing,
and the last seven chapters deal with applications in communication systems, real-time data
handling, and interactive educational packages, respectively. There is a great deal of overlap
between some of the chapters, as they might be sharing the same theory, application, or ap-
proach; yet, we chose to organize the chapter into the following five sections:
I. Image Processing:
This section contains 14 chapters that explore different applications in the field of image pro-
cessing. These applications cover a variety of topics related to segmentation, encoding, resto-
ration, steganography, and denoising. Chapters (1) to (14) are arranged into groups based on
the application of interest as explained in the following table:
Chapter(s) Main topic (application)
1 – 3 Image segmentation and encoding
4 – 6 Medical applications
7 & 8 Data hiding
9 & 10 Image classification
11& 12 Biometric applications
13 & 14 Noise suppression
Chapter (1) proposes a software approach to image stabilization that depends on two conse-
quent steps of global image registration and image fusion. The improved reliability and the
reduced size and cost of this approach make it ideal for small mobile devices. Chapter (2)
investigates contour retrieval in images via estimating the parameters of rectilinear or circular
contours as a source localization problem in high-resolution array processing. It presents a
subspace-based line detection algorithm for the estimation of rectilinear contours based on
signal generation upon a linear antenna. Chapter (3) proposes a locally adaptive resolution
(LAR) codec as a contribution to the field of image compression and encoding. It focuses on
a few representative features of the LAR technology and its preliminary associated perfor-
mances, while discussing their potential applications in different image-related services.
Chapter (4) uses nonlinear locally adaptive transformations to perform image registration
with application to MRI brains scan. Both parametric and nonparametric transformations,
along with the use of multi-model similarity measures, are used to robustify the results to
11.
VII
tissue intensity variations.Chapter (5) describes a semi-automated segmentation method for
dynamic contrast-enhanced MRI sequences for renal function assessment. The superiority of
the proposed method is demonstrated via testing and comparing it with manual segmenta-
tion by radiologists. Chapter (6) uses a hybrid technique of motion estimation and segmenta-
tion that are based on variational techniques to improve the performance of cardiac motion
application in indicating heart diseases.
Chapter (7) investigates the problem of restricting color information for images to only au-
thorized users. It surveys some of the reported solutions in the literature and proposes an
improved technique to hide a 512-color palette in an 8-bit gray level image. Chapter (8) in-
troduces a novel application of the JPEG2000-based information hiding for synchronized and
scalable 3D visualization. It also provides a compact, yet detailed, survey of the state of the art
techniques in the field of using DWT in image compression and encoding.
Chapter (9) uses a content-based image-retrieval technique to validate the results obtained
from defects-detection algorithms, in Ad-hoc features, to find similar images suffering from
the same defects in order to classify the questioned image as defected or not. Chapter (10)
explores a novel approach for automatic crack detection and classification for the purpose
of roads maintenance and estimating pavement surface conditions. This approach relies on
image processing and pattern recognition techniques using a framework based on local sta-
tistics, computed over non-overlapping image regions.
Chapter (11) proposes a robust image segmentation method to construct a contact-free hand
identification system via using infrared illumination and templates that guide the user in or-
der to minimize the projective distortions. This biometric identification system is tested on a
real-world database, composed by 102 users and more than 4000 images, resulting in an EER
of 3.2%. Chapter (12) analyzes eye movements of subjects when looking freely at dynamic
stimuli such as videos. This study uses face detection techniques to prove that faces are very
salient in both static and dynamic stimuli.
Chapter (13) reports the use of specialized denoising algorithms that deal with correlated
noise in images. Several useful noise estimation techniques are presented that can be used
when creating or adapting a white noise denoising algorithm for use with correlated noise.
Chapter (14) presents a novel technique that estimates and eliminates additive noise inherent
in images acquired under incoherent illumination. This technique combines the two methods
of scatter plot and data masking to preserve the physical content of polarization-encoded
images.
II. Speech/Audio Processing:
This section contains six chapters that explore different applications in the field of speech
and audio processing. These applications cover a variety of topics related to speech analysis,
enhancement of audio quality, and classification of both audio and speech. Chapters (15) to
(20) are arranged into groups based on the application of interest as explained in the follow-
ing table:
12.
VIII
Chapter(s) Main topic(application)
15 & 16 Speech/audio enhancement
17 & 18 Biometric applications
19 & 20 Speech/audio analysis
Chapter (15) proposes an improved iterative Wiener filter (IWF) algorithm based on the
time-varying complex auto regression (TV-CAR) speech analysis for enhancing the quality
of speech. The performance of the proposed system is compared against the famous linear
predictive coding (LPC) method and is shown to be superior. Chapter (16) introduces a ro-
bust echo detection algorithm in mobile phones for improving the calls quality. The structure
for the echo detector is based on comparison of uplink and downlink pitch periods. This
algorithm has the advantage of processing adaptive multi-rate (AMR) coded speech signals
without decoding them first and its performance is demonstrated to be satisfactory.
Chapter (17) investigates the problem of voice/speaker recognition. It compares the effective-
ness of using a combination of vector quantization (VQ) and different forms for the Mel fre-
quency cepstral coefficients (MFCCs) when using the Gaussian mixture model for modeling
the speaker characteristics. Chapter (18) deals with issues, related to processing and mining
of specific speech information, which are commonly ignored by the mainstream research in
this field. These issues focus on speech with emotional content, effects of drugs and Alcohol,
speakers with disabilities, and various kinds of pathological speech.
Chapter (19) uses narrow-band filtering to construct an estimation technique of instantaneous
parameters used in sinusoidal modeling. The proposed method utilizes pitch detection and
estimation for achieving good analysis of speech signals. Chapter (20) conducts an experi-
mental study on 420 songs from four different languages to perform statistical analysis of the
music information that can be used as prior knowledge in formulating constrains for music
information extraction systems.
III. Communication Systems:
This section contains three chapters that deal with the transmission of signals through public
communication channels. Chapters (21) to (23) discuss the problems of modeling and simula-
tion of multi-input multi-output wireless channels, multi-antenna receivers, and chaos-based
cryptography, respectively. Chapter (21) discusses how to construct channel simulators for
multi-input multi-output (MIMO) communication systems for testing physical layer algo-
rithms such as channel estimation. It also presents the framework, techniques, and theories
in this research area. Chapter (22) presents a new approach to the broadcast channel problem
that is based on combining dirty-paper coding (DPC) with zero-forcing (ZF) precoder and
optimal beamforming design. This approach can be applied to the case when several antennas
coexist at the receiver. It also introduces an application that deals with the cooperation design
in wireless sensor networks with intra and intercluster interference. Chapter (23) investigates
three important steps when establishing a secure communication system using chaotic sig-
nals. Performing fast synchronization, identifying unknown parameters, and generating ro-
bust cryptography are analyzed. Different categories of systems are introduced and real-time
implementation issues are discussed.
13.
IX
IV. Time-series Processing:
Thissection contains three chapters that deal with real-time data handling and processing.
These data can be expressed as functions of time, sequence of images, or readings from sen-
sors. It provides three different applications. Chapter (24) introduces an application, which is
based on the fusion of electronecephalography (EEG) and functional magnetic resonance im-
aging (fMRI), for the detection of seizure. It proposes a novel constrained spatial independent
component analysis (ICA) algorithm that outperforms the existing unconstrained algorithm
in terms of estimation error and closeness between the component time course and the seizure
EEG signals. Chapter (25) introduces the design and implementation of a real-time measure-
ment system for estimating the air parameters that are vital for effective and reliable flights.
The proposed system is installed in the cockpit of the aircraft and uses two embedded PCs
and four FPGA signal processing boards. It utilizes laser beams for estimating the air param-
eters necessary for the safety of the flight. Chapter (26) discusses the performance of the target
signal port-starboard discrimination for underwater towed multi-line arrays that have typical
applications in military underwater surveillance and seismic exploring
V. Educational Systems:
Chapter (27) introduces an open source software package that can be used as an educational
tool for teaching signal processing in a variety of fields including image and audio processing.
It provides an interactive environment that is easy to use with GUI and web interface that is
XML-based. This package can be used as an alternative to other existing packages including
J-DSP, Simulink and SciLab.
November 2009
Ashraf A. Zaher
XI
Contents
Preface V
1. DigitalImage Stabilization 001
Marius Tico
2. About array processing methods for image segmentation 015
J. Marot, C. Fossati and Y. Caulier
3. Locally Adaptive Resolution (LAR) codec 037
François Pasteau, Marie Babel, Olivier Déforges,
Clément Strauss and Laurent Bédat
4. Methods for Nonlinear Intersubject Registration in Neuroscience 049
Daniel Schwarz and Tomáš Kašpárek
5. Functional semi-automated segmentation of renal DCE-MRI
sequences using a Growing Neural Gas algorithm 069
Chevaillier Beatrice, Collette Jean-Luc, Mandry Damien and Claudon
6. Combined myocardial motion estimation and segmentation
using variational techniques 081
N. Carranza-Herrezuelo, A. Bajo, C. Santa-Marta,
G. Cristóbal and A. Santos, M.J. Ledesma-Carbayo
7. Protecting the color information by hiding it 101
Marc CHAUMONT and William PUECH
8. JPEG2000-Based Data Hiding and its Application
to 3D Visualization 123
Khizar Hayat, William Puech and Gilles Gesquière
9. Content-Based Image Retrieval as Validation for Defect
Detection in Old Photos 147
Edoardo Ardizzone, Haris Dindo and Giuseppe Mazzola
10. Supervised Crack Detection and Classification in Images
of Road Pavement Flexible Surfaces 159
Henrique Oliveira and Paulo Lobato Correia
16.
XII
11. Contact-free handbiometric system for real environments
based on geometric features 185
Aythami Moralesand Miguel A. Ferrer
12. Gaze prediction improvement by adding a face feature
to a saliency model 195
MARAT Sophie, GUYADER Nathalie and PELLERIN Denis
13. Suppression of Correlated Noise 211
Jan Aelterman, Bart Goossens, Aleksandra Pizurica and Wilfried Philips
14. Noise Estimation of Polarization-Encoded Images
by Peano-Hilbert Fractal Path 237
Samia Ainouz-Zemouche and Fabrice Mériaudeau
15. Speech Enhancement based on Iterative Wiener Filter
using Complex LPC Speech Analysis 251
Keiichi Funaki
16. Detection of echo generated in mobile phones 267
Tõnu Trump
17. Application of the Vector Quantization Methods and the Fused
MFCC-IMFCC Features in the GMM based Speaker Recognition 281
Sheeraz Memon, Margaret Lech, Namunu Maddage and Ling He
18. Information Mining from Speech Signal 297
Milan Sigmund
19. Estimation of the instantaneous harmonic parameters of speech 321
Elias Azarov and Alexander Petrovsky
20. Music Structure Analysis Statistics for Popular Songs 345
Namunu C. Maddage, Li Haizhou and Mohan S. Kankanhalli
21. MIMO Channel Modeling and Simulation 367
R. Parra-Michel, A. Alcocer-Ochoa,
A. Sanchez-Hernandez and Valeri Kontorovich
22. On the role of receiving beamforming in transmitter
cooperative communications 395
Santiago Zazo, Ivana Raos and Benjamín Béjar
23. Robust Designs of Chaos-Based Secure Communication Systems 415
Ashraf A. Zaher
24. Simultaneous EEG-fMRI Analysis with Application to
Detection of Seizure Signal Sources 441
Min Jing and Saeid Sanei
17.
XIII
25. Real-Time SignalAcquisition, High Speed Processing and
Frequency Analysis in Modern Air Data Measurement Instruments 459
Theodoros Katsibas, Theodoros Semertzidis,
Xavier Lacondemine and Nikos Grammalidis
26. Performance analysis of port-starboard discrimination
for towed multi-line array 481
Biao Jiang
27. Audio and Image Processing Easy Learning for Engineering
Students using EasyPAS Tool 501
Javier Vicente, Begoña García, Amaia Méndez and Ibon Ruiz
19.
Digital Image Stabilization1
0
Digital Image Stabilization
Marius Tico
Nokia Research Center
Palo Alto, CA, USA
1. Introduction
The problem of image stabilization dates since the beginning of photography, and it is basi-
cally caused by the fact that any known image sensor needs to have the image projected on
it during a period of time called integration time. Any motion of the camera during this time
causes a shift of the image projected on the sensor resulting in a degradation of the final image,
called motion blur.
The ongoing development and miniaturization of consumer devices that have image acquisi-
tion capabilities increases the need for robust and efficient image stabilization solutions. The
need is driven by two main factors: (i) the difficulty to avoid unwanted camera motion when
using a small hand-held device (like a camera phone), and (ii) the need for longer integration
times due to the small pixel area resulted from the miniaturization of the image sensors in
conjunction with the increase in image resolution. The smaller the pixel area the less pho-
tons/second could be captured by the pixel such that a longer integration time is needed for
good results.
It is of importance to emphasize that we make a distinction between the terms "digital image
stabilization" and "digital video stabilization". The latter is referring to the process of eliminat-
ing the effects of unwanted camera motion from video data, see for instance Erturk & Dennis
(2000); Tico & Vehviläinen (2005), whereas digital image stabilization is concerned with cor-
recting the effects of unwanted motions that are taking place during the integration time of a
single image or video frame.
The existent image stabilization solutions can be divided in two categories based on whether
they are aiming to correct or to prevent the motion blur degradation. In the first category are
those image stabilization solutions that are aiming for restoring a single image shot captured
during the exposure time. This is actually the classical case of image capturing, when the
acquired image may be corrupted by motion blur, caused by the motion that have taken place
during the exposure time. If the point spread function (PSF) of the motion blur is known then
the original image can be restored, up to some level of accuracy (determined by the lost spatial
frequencies), by applying an image restoration approach Gonzalez & Woods (1992); Jansson
(1997). However, the main difficulty is that in most practical situations the motion blur PSF
is not known. Moreover, since the PSF depends of the arbitrary camera motion during the
exposure time, its shape is different in any degraded image as exemplified in Fig. 1. Another
difficulty comes from the fact that the blur degradation is not spatially invariant over the
image area. Thus, moving objects in the scene may result in very different blur models in
certain image areas. On the other hand, even less dynamic scenes may contain different blur
models in different regions in accordance to the distance between the objects and the camera,
1
20.
Recent Advances inSignal Processing
2
Fig. 1. Different camera motions cause different blur degradations.
i.e., during a camera translation close objects have larger relative motions than distant objects,
phenomenon known as "parallax".
In order to cope with the insufficient knowledge about the blur PSF one could adopt a blind
de-convolution approach, e.g., Chan & Wong (1998); You & Kaveh (1996). Most of these meth-
ods are computationally expensive and they have reliability problems even when dealing with
spatially invariant blur. Until now, published research results have been mainly demonstrated
on artificial simulations and rarely on real world images, such that their potential use in con-
sumer products seems rather limited for the moment.
Measurements of the camera motion during the exposure time could help in estimating the
motion blur PSF and eventually to restore the original image of the scene. Such an approach
have been introduced by Ben-Ezra & Nayar (2004), where the authors proposed the use of an
extra camera in order to acquire motion information during the exposure time of the principal
camera. A different method, based on specially designed high-speed CMOS sensors has been
proposed by Liu & Gamal (2003). The method exploits the possibility to independently control
the exposure time of each image pixel in a CMOS sensor. Thus, in order to prevent motion
blur the integration is stopped selectively in those pixels where motion is detected.
Another way to estimate the PSF has been proposed in Tico et al. (2006); Tico & Vehviläinen
(2007a); Yuan et al. (2007), where a second image of the scene is taken with a short exposure.
Although noisy, the secondary image is much less affected by motion blur and it can be used
as a reference for estimating the motion blur PSF which degraded the principal image.
In order to cope with the unknown motion blur process, designers have adopted solutions
able to prevent such blur for happening in the first place. In this category are included all
optical image stabilization (OIS) solutions adopted nowadays by many camera manufactures.
These solutions are utilizing inertial senors (gyroscopes) in order to measure the camera mo-
tion, following then to cancel the effect of this motion by moving either the image sensor
Konika Minolta Inc. (2003), or some optical element Canon Inc. (2006) in the opposite direc-
tion. The miniaturization of OIS systems did not reach yet the level required for implemen-
tation in a small device like a camera phone. In addition, most current OIS solutions cannot
cope well with longer exposure times. In part this is because the inertial motion sensors, used
to measure the camera motion, are less sensitive to low frequency motions than to medium
and high frequency vibrations. Also, as the exposure time increases the mechanism may drift
due to accumulated errors, producing motion blurred images (Fig. 2).
An image acquisition solution that can prevent motion blur consists of dividing long expo-
sure times in shorter intervals, following to capture multiple short exposed image frames of
21.
Digital Image Stabilization3
(a) (b) (c)
Fig. 2. Optical image stabilization examples at different shutter speeds. The images have been
captured with a hand-held camera using Canon EF-S 17-85mm image stabilized lens. The
exposure times used in taking the pictures have been: (a) 1/25sec, (b) 1/8sec, and (c) 1/4sec.
The images get increasingly blurred as the shutter speed slows down.
the same scene. Due to their short exposure, the individual frames are corrupted by sensor
noises (e.g., photon-shot noise, readout noise) Nakamura (2006) but, on the other hand, they
are less affected by motion blur. Consequently, a long exposed and motion blur free picture
can be synthesized by registering and fusing the available short exposed image frames (see
Tico (2008a;b); Tico & Vehviläinen (2007b)). Using this technique the effect of camera motion
is transformed from a motion blur degradation into a misalignment between several image
frames. The advantage is that the correction of the misalignment between multiple frames is
more robust and computationally less intensive than the correction of a motion blur degraded
image.
In this chapter we present the design of such a multi-frame image stabilization solution, ad-
dressing the image registration and fusion operations. A global registration approach, de-
scribed in Section 2, assists the identification of corresponding pixels between images. How-
ever the global registration cannot solve for motion within the scene as well as for parallax.
Consequently one can expect local misalignments even after the registration step. These will
be solved in the fusion process described in Section 3.
2. Image registration
Image registration is essential for ensuring an accurate information fusion between the avail-
able images. The existent approaches to image registration could be classified in two cate-
gories: feature based, and image based methods, Zitova & Flusser (2003). The feature based
methods rely on determining the correct correspondences between different types of visual
features extracted from the images. In some applications, the feature based methods are the
most effective ones, as long as the images are always containing specific salient features (e.g.,
minutiae in fingerprint images Tico & Kuosmanen (2003)). On the other hand when the num-
ber of detectable feature points is small, or the features are not reliable due to various image
degradations, a more robust alternative is to adopt an image based registration approach, that
22.
Recent Advances inSignal Processing
4
utilizes directly the intensity information in the image pixels, without searching for specific
visual features.
In general a parametric model for the two-dimensional mapping function that overlaps an
"input" image over a "reference" image is assumed. Let us denote such mapping function by
t(x; p) = [tx(x; p) ty(x; p)]t, where x = [x y]t stands for the coordinates of an image pixel,
and p denotes the parameter vector of the transformation. Denoting the "input" and "refer-
ence" images by h and g respectively, the objective of an image based registration approach
is to estimate the parameter vector p that minimizes a cost function (e.g., the sum of square
differences) between the transformed input image h(t(x; p)) and the reference image g(x).
The minimization of the cost function, can be achieved in various ways. A trivial approach
would be to adopt an exhaustive search among all feasible solutions by calculating the cost
function at all possible values of the parameter vector. Although this method ensures the
discovery of the global optimum, it is usually avoided due to its tremendous complexity.
To improve the efficiency several alternatives to the exhaustive search technique have been
developed by reducing the searching space at the risk of losing the global optimum, e.g.,
logarithmic search, three-step search, etc, (see Wang et al. (2002)). Another category of image
based registration approaches, starting with the work of Lucas & Kanade (1981), and known
also as gradient-based approaches, assumes that an approximation to image derivatives can
be consistently estimated, such that the minimization of the cost function can be achieved
by applying a gradient-descent technique (see also Baker & Matthews (2004); Thevenaz &
Unser (1998)). An important efficiency improvement, for Lucas-Kanade algorithm, has been
proposed in Baker & Matthews (2004), under the name of "Inverse Compositional Algorithm"
(ICA). The improvement results from the fact that the Hessian matrix of the cost function,
needed in the optimization process, is not calculated in each iteration, but only once in a pre-
computation phase.
In this work we propose an additional improvement to gradient-based methods, that consists
of simplifying the repetitive image warping and interpolation operations that are required
during the iterative minimization of the cost function. Our presentation starts by introducing
an image descriptor in Section 2.1, that is less illumination dependent than the intensity com-
ponent. Next, we present our registration algorithm in Section 2.2, that is based on matching
the proposed image descriptors of the two images instead their intensity components.
2.1 Preprocessing
Most of the registration methods proposed in the literature are based on matching the inten-
sity components of the given images. However, there are also situations when the intensity
components do not match. The most common such cases are those in which the two images
have been captured under different illumination conditions, or with different exposures.
In order to cope with such cases we propose a simple preprocessing step aiming to extract an
illumination invariant descriptor from the intensity component of each image. Denoting by
H(x) the intensity value in the pixel x, and with avg(H) the average of all intensity values
in the image, we first calculate H̄(x) = H(x)/avg(H), in order to gain more independence
from the global scene illumination. Next, based on the gradient of H̄ we calculate Hg(x) =
∣H̄x(x)∣ + ∣H̄y(x)∣ in each pixel, and med(Hg) as the median value of Hg(x) over the entire
image.
23.
Digital Image Stabilization5
Finally, the actual descriptor that we are using in the registration operation is given by the
following binary image
h(x) =
{
1 if Hg(x) > med(Hg)
0 otherwise
(1)
2.2 Registration algorithm
In the following we describe an image based registration method that is using a multi-
resolution coarse to fine strategy. Typically in such algorithm, at each iteration step one of
the images should be warped in accordance to the parameters estimated so far. In our method
this warping operation is highly simplified on the expense of increase memory usage.
The levels of the multi-resolution representation are over-sampled, and they are obtained
by iteratively smoothing the original image descriptor h, such that to obtain smoother and
smoother versions of it. Let h̃ℓ denotes the smoothed image resulted after ℓ-th low-pass filter-
ing iterations (h̃0 = h). The smoothed image at next iteration can be calculated by applying
one-dimensional filtering along the image rows and columns as follows:
h̃ℓ+1 (x, y) = ∑
r
wr ∑
c
wch̃ℓ
(
x − 2ℓ
c, y − 2ℓ
r
)
, (2)
where wk are the taps of a low-pass filter.
The registration approach takes advantage of the fact that each decomposition level (h̃ℓ) is
over-sampled, and hence it can be reconstructed by a subset of its pixels. This property allows
to enhance the efficiency of the registration process by using only a subset of the pixels in the
registration algorithm. The advantage offered by the availability of over-sampled decompo-
sition level, is that the set of pixels that can be used in the registration is not unique. A broad
range of geometrical transformations can be approximated by simply choosing a different set
of pixels to describe the sub-sampled image level. In this way, the over-sampled image level
is regarded as a "reservoir of pixels" for different warped sub-sampled versions of the image,
which are needed at different stages in the registration algorithm.
Let xn,k = [xn,k yn,k]t, for n, k integers, denote the coordinates of the selected pixels into the
smoothed image (h̃ℓ). A low-resolution version of the image (ĥℓ) can be obtained by col-
lecting the values of the selected pixels: ĥℓ(n, k) = h̃ℓ(xn,k). Moreover, given an invertible
geometrical transformation function t(x; p), the warping version of the low resolution image
can be obtained more efficiently by simply selecting another set of pixels from the area of the
smoothed image, rather than warping and interpolating the low-resolution image ĥℓ. This is:
ĥ′
ℓ(n, k) = h̃ℓ(x′
n,k), where x′
n,k = round
(
t−1(xn,k; p)
)
.
The process described above is illustrated in Fig.3, where the images shown on the bottom
row represent two low-resolutions warped versions of the original image (shown in the top-
left corner). The two low-resolution images are obtained by sampling different pixels from
the smoothed image (top-right corner) without interpolation.
The registration method used in our approach is presented in Algorithm 1. The algorithm
follows a coarse to fine strategy, starting from a coarse resolution level and improving the pa-
rameter estimate with each finer level, as details in the Algorithm 2. The proposed algorithm
relies on matching image descriptors (1) derived from each image rather than image intensity
components.
Algorithm 2 presents the registration parameter estimation at one resolution level. In this
algorithm, the constant N0, specifies the number of iterations the algorithm is performing
24.
Recent Advances inSignal Processing
6
50 100 150 200 250
50
100
150
200
250
50 100 150 200 250
50
100
150
200
250
5 10 15 20 25
5
10
15
20
25
5 10 15 20 25
5
10
15
20
25
Fig. 3. Low-resolution image warping by re-sampling an over-sampled image decomposition
level.
Algorithm 1 Global image registration
Input: the input and reference images plus, if available, an initial guess of the parameter
vector p = [p1 p2 ⋅ ⋅ ⋅ pK]t.
Output: the parameter vector that overlaps the input image over the reference image.
1- Calculate the descriptors (1) for input and reference images, denoted here by h and g,
respectively.
2- Calculate the decomposition levels of the two image descriptors {h̃ℓ, g̃ℓ ∣ ℓmin ≤ ℓ ≤
ℓmax}.
3- For each level ℓ between ℓmax and ℓmin, do Algorithm 2.
after finding a minima of the error function. This is set in order to reduce the chance of ending
in a local minima. As shown in the algorithm the number of iterations is reset to N0, every
time a new minima of the error function is found. The algorithm stops only if no other minima
is found in N0 iterations. In our experiments a value N0 = 10 has been used.
25.
Digital Image Stabilization7
Algorithm 2 Image registration at one level
Input: the ℓ-th decomposition level of the input and reference images (h̃ℓ, g̃ℓ), plus the
parameter vector p = [p1 p2 ⋅ ⋅ ⋅ pK]t estimated at the previous coarser level.
Output: a new estimate of the parameter vector pout that overlaps h̃ℓ over g̃ℓ.
Initialization: set minimum matching error Emin = ∞, number of iterations Niter = N0
1- Set the initial position of the sampling points xn,k in the vertex of a rectangular lattice
of period D = 2ℓ, over the area of the reference image g̃ℓ.
2- Construct the reference image at this level: ĝ(n, k) = g̃ℓ(xn,k).
3- For each parameter pi of the warping function calculate the image
Ji(n, k) = ĝx(n, k)
∂tx(x; 0)
∂pi
+ ĝy(n, k)
∂ty(x; 0)
∂pi
where ĝx, ĝy denote a discrete approximation of the gradient components of the reference
image.
4- Calculate the first order approximation of the K × K Hessian matrix, whose element
(i, j) is given by:
H(i, j) = ∑
n,k
Ji(n, k)Jj(n, k)
5- Calculate a K × K updating matrix U, as explain in the text.
Iterations: while Niter > 0
6- Construct the warped low-resolution input image in accordance to the warping param-
eters estimated so far: ĥ(n, k) = h̃ℓ(round
(
t−1(xn,k; p)
)
).
7- Determine the overlapping area between ĥ and ĝ, as the set of pixel indices Ψ such that
any pixel position (n, k) ∈ Ψ is located inside the two images.
8- Calculate the error image e(n, k) = ĥ(n, k) − ĝ(n, k), for any (n, k) ∈ Ψ.
9- Calculate a smooth version ẽ of the error image by applying a 2 × 2 constant box filter,
and determine total error E = ∑(n,k)∈Ψ ∣ẽ(n, k)∣.
10- If E ≥ Emin then Niter = Niter − 1, otherwise update Emin = E, Niter = N0, and
pout = p.
11- Calculate the K × 1 vector q, with q(i) = ∑(n,k)∈Ψ ẽ(n, k)Ji(n, k).
12- Update the parameter vector p = p + Uq
The parameter update (i.e., line 12 in Algorithm 2) makes use of an updating matrix U calcu-
lated in step 5 of the algorithm. This matrix depends of the functional form of the geometrical
transformation assumed between the two images, t(x; p). For instance, in case of affine trans-
26.
Recent Advances inSignal Processing
8
formation
t(x; p) =
[
(1 − p3)x + p4y + p1
p5x + (1 − p6)y + p2
]
, (3)
the parameter update matrix is
U = diag (D, D, 1, 1, 1, 1) H−1
, (4)
whereas in case of a projective transformation
t(x; p) =
[
(1 − p3)x + p4y + p1
p5x + (1 − p6)y + p2
]
/(p7x + p8y + 1), (5)
we have
U = diag (D, D, 1, 1, 1, 1, 1/D, 1/D) H−1
. (6)
In our implementation of multi-resolution image decomposition (2), we used a symmetric
filter w of size 3, whose taps are respectively w−1 = 1/4, w0 = 1/2, and w1 = 1/4. Also,
in order to reduce the storage space the first level of image decomposition (i.e., h̃1), is sub-
sampled by 2, such that any higher decomposition level is half the size of the original image.
3. Fusion of multiple images
The pixel brightness delivered by an imaging system is related to the exposure time through
a non-linear mapping called "radiometric response function", or "camera response function"
(CRF). There are a variety of techniques (e.g., Debevec & Malik (1997); Mitsunaga & Nayar
(1999)) that can be used for CRF estimation. In our work we assume that the CRF function of
the imaging system is known, and based on that we can write down the following relation for
the pixel brightness value:
I(x) = CRF (g(x)∆t) (7)
where x = [x y]T denotes the spatial position of an image pixel, I(x) is the brightness value
delivered by the system, g(x) denotes the irradiance level caused by the light incident on the
pixel x of the imaging sensor, and ∆t stands for the exposure time of the image.
Let Ik, for k ∈ {1, . . . , K} denote the K observed image frames whose exposure times are
denoted by ∆tk. A first step in our algorithm is to convert each image to the linear (irradiance)
domain based on knowledge about the CRF function, i.e.,
gk(x) = (1/∆tk) CRF−1
(Ik(x)) , for all k ∈ {1, . . . , K}. (8)
We assume the following model for the K observed irradiance images:
gk(x) = fk(x) + nk(x), (9)
where where x = [x y]T denotes the spatial position of an image pixel, gk is the k-th observed
image frame, nk denotes a zero mean additive noise, and fk denotes the latent image of the
scene at the moment the k-th input frame was captured. We emphasize the fact that the scene
may change between the moments when different input frames are captured. Such changes
could be caused by unwanted motion of the camera and/or by the motion of different objects
in the scene. Consequently, the algorithm can provide a number of K different estimates of
the latent scene image each of them corresponding to a different reference moment.
27.
Digital Image Stabilization9
In order to preserve the consistency of the scene, we select one of the input images as reference,
following to aim for improving the selected image based on the visual data available in all
captured images. In the following, we denote by gr, (r ∈ {1, . . . , K}) the reference image
observation, and hence the objective of the algorithm is to recover an estimate of the latent
scene image at moment r, i.e., f = fr.
The restoration process is carried out based on a spatiotemporal block processing. Assuming
a division of gr in non-overlapping blocks of size B × B pixels, the restored version of each
block is obtained as a weighted average of all blocks located in a specific search range, inside
all observed images.
Let XB
x denote the sub-set of spatial locations included into a block of B × B pixels centered in
the pixel x, i.e.:
XB
x =
{
y ∈ Ω ∣ [−B − B]T
< 2 (y − x) ≤ [B B]T
}
, (10)
where the inequalities are componentwise, and Ω stands for the image support. Also, let
g(XB
x ) denote the B2 × 1 column vector comprising the values of all pixels from an image g
that are located inside the block XB
x .
The restored image is calculated block by block as follows
ˆ
f (XB
x ) =
1
Z
K
∑
k=1
∑
y∈XS
x
wk (x, y) gk(XB
y ), for all XB
x , (11)
where Z = ∑K
k=1 ∑y∈XS
x
wk (x, y), is a normalization value, XS
x denotes the spatial search range
of size S × S centered in x, and wk (x, y) is a scalar weight value assigned to an input block XB
y
from image gk.
The weight values are emphasizing the input blocks that are more similar with the reference
block. Note that, at the limit, by considering only the most similar such block from each input
image we obtain the block corresponding to the optical flow between the reference image and
that input image, as in Tico & Vehviläinen (2007b). In such a case the weighted average (11)
comprises only a small number of contributing blocks for each reference block. If more com-
putational power is available, we can chose the weight values such that to use more blocks
for the restoration of each reference block, like for instance in the solution presented in Tico
(2008a), where the restoration of each reference block is carried out by considering all visu-
ally similar blocks found either inside the reference image or inside any other input image.
Although the use of block processing is more efficient for large images, it might create arti-
facts in detailed image areas. In order to cope with this aspect, the solution presented in Tico
(2008a), proposes a mechanism for adapting the block size to the local image content, by us-
ing smaller blocks in detail areas and larger blocks in smooth areas of the image. We conclude
this section by summarizing the operations of a multi-frame image stabilization solutions in
Algorithm 3.
28.
Recent Advances inSignal Processing
10
Algorithm 3 Stabilization algorithm
Input: multiple input images of the scene.
Output: one stabilized image of the scene.
1- Select a reference image either in a manual or an automatic manner. Manual selection
can be based on preferred scene content at the moment the image frame was captured,
whereas automatic selection could be trivial (i.e., selecting the first frame), or image quality
based (i.e., selecting the higher quality frame based on a quality criteria). In our work we
select the reference image frame as the one that is the least affected by blur. To do this we
employ a sharpness measure, that consists of the average energy of the image in the middle
frequency band, calculated in the FFT domain.
2- Convert the input images to a linear color space by compensating for camera response
function non-linearity.
3- Register the input images with respect to the reference image.
4- Estimate the additive noise variance in each input image. Instead using a global vari-
ance value for the entire image, in our experiments we employed a linear model for the
noise variance with respect to the intensity level in order to emulate the Poisson process of
photon counting in each sensor pixel.
5- Restore each block of the reference image in accordance to (11).
6- Convert the resulted irradiance estimate ˆ
f (x), of the final image, back to the image
domain, Î(x) = CRF( ˆ
f (x)∆t), based on the desired exposure time ∆t. Alternatively, in
order to avoid saturation and hence to extend the dynamic range of the captured image,
one can employ a tone mapping procedure (e.g., Jiang & Guoping (2004)) for converting
the levels of the irradiance image estimate into the limited dynamic range of the display
system.
29.
Digital Image Stabilization11
(a) (b)
(c) (d)
Fig. 4. Real image example: (a) one input image out of four, (b) overlapping all four input
images, (c,d) two different results obtained by selecting different reference moments.
(a) (b)
Fig. 5. Fragment from Fig. 4: (a) the digitally gained reference image, (b) the same fragment
from the result.
30.
Recent Advances inSignal Processing
12
(a) (b)
Fig. 6. Real imaging examples: (a) auto-exposed image taken with a camera phone (exposure
time: 1.8 sec), (b) stabilized image by fusing four frames with exposure time of 0.3 sec each.
(a) (b)
Fig. 7. Applying the proposed algorithm onto a single input image (a), delivers a noise filtered
version (b), of the input image.
4. Examples
A visual example of the presented method is shown in Fig. 4. In total a number of four short
exposed image frames (like the one shown in Fig. 4(a)) have been captured. During the time
the individual images have been captured the scene was changed due to moving objects, as
reveal by Fig. 4 (b). Applying the proposed algorithm we can recover a high quality image
at any moment by choosing the reference frame properly, as exemplified by Fig. 4 (c) and (d).
The improvement in image quality achieved by combining multiple images is demonstrated
by the fragment in Fig. 5 that shows significant reduction in image noise between one input
image Fig. 5(a) and the result Fig. 5(b).
Two examples using images captured with a mobile phone camera are shown in Fig. 6 and
Fig. 7. In both cases the algorithm was applied onto the Bayer RAW image data before image
31.
Digital Image Stabilization13
pipeline operations. A simple linear model for the noise variance with respect to the intensity
level was assumed in order to emulate the Poisson process of photon counting in each sensor
pixel Nakamura (2006), for each color channel.
Fig. 6(a), shows an image obtained without stabilization using the mobile device set on au-
tomatic exposure. Due to unwanted camera motion the resulted image is rather blurry. For
comparison, Fig. 6(b), shows the image obtained with our proposed stabilization algorithm
by fusing several short exposed images of the same scene. An example when the proposed
algorithm is applied onto a single input image is shown in Fig. 7. In this case the algorithm
acts as a noise filtering method delivering the image Fig. 7(b), by reducing the noise present
in the input image Fig. 7(a).
5. Conclusions and future work
In this chapter we presented a software solution to image stabilization based on fusing the
visual information between multiple frames of the same scene. The main components of the
algorithm, global image registration and image fusion have been presented in detail along
with several visual examples. An efficient coarse to fine image based registration solution is
obtained by preserving an over-sampled version of each pyramid level in order to simplify
the warping operation in each iteration step. Next the image fusion step matches the visual
similar image blocks between the available frames coping thereby with the presence of mov-
ing objects in the scene or with the inability of the global registration model to describe the
camera motion. The advantages of such a software solution against the popular hardware
opto-mechanical image stabilization systems include: (i) the ability to prevent blur caused
by moving objects in a dynamic scene, (ii) the ability to deal with longer exposure times and
stabilized not only high frequency vibrations but also low frequency camera motion during
the integration time, and (iii) the reduced cost and size required for implementation in small
mobile devices. The main disadvantage is the need to capture multiple images of the scene.
However, nowadays most camera devices provide a "burst" mode that ensures fast capturing
of multiple images. Future work would have to address several other applications that can
take advantage of the camera "burst" mode by fusing multiple images captured with similar
of different exposure and focus parameters.
6. References
Baker, S. & Matthews, I. (2004). Lucas-Kanade 20 Years On: A Unifying Framework, Interna-
tional Journal of Computer Vision .
Ben-Ezra, M. & Nayar, S. K. (2004). Motion-Based Motion Deblurring, IEEE Transactions on
Pattern Analysis and Machine Intelligence 26(6): 689–698.
Canon Inc. (2006). Shift-Method Optical Image Stabilizer.
URL: www.canon.com/technology/dv/02.html
Chan, T. F. & Wong, C.-K. (1998). Total Variation Blind Deconvolution, IEEE Transactions on
Image Processing 7(3): 370–375.
Debevec, P. E. & Malik, J. (1997). Recovering High Dynamic Range Radiance Maps from Pho-
tographs, Proc. of International Conference on Computer Graphics and Interactive Tech-
niques (SIGGRAPH).
Erturk, S. & Dennis, T. (2000). Image sequence stabilization based on DFT filtering, IEE Proc.
On Vision Image and Signal Processing 147(2): 95–102.
Gonzalez, R. C. & Woods, R. E. (1992). Digital Image Processing, Addison-Wesley.
32.
Recent Advances inSignal Processing
14
Jansson, P. (1997). Deconvolution of image and spectra, Academic Press.
Jiang, D. & Guoping, Q. (2004). Fast tone mapping for high dynamic range images, Proc. of
17th Intl. Conf. on Pattern Recognition (ICPR), Vol. 2, pp. 847–850.
Konika Minolta Inc. (2003). Anti-Shake Technology, www.konicaminolta.com/ prod-
ucts/consumer/digital camera/dimage/dimage-a2/02.html .
Liu, X. & Gamal, A. E. (2003). Synthesis of high dynamic range motion blur free image from
multiple captures, IEEE Transaction on Circuits and Systems-I 50(4): 530–539.
Lucas, B. D. & Kanade, T. (1981). An Iterative Image Registration Technique with an Appli-
cation to Stereo Vision, Proc. of 7th Intl Conf on Artificial Intelligence (IJCAI), Vancou-
ver,Canada, pp. 674–679.
Mitsunaga, T. & Nayar, S. K. (1999). Radiometric self calibration, Proc. of Conference on Com-
puter Vision and Pattern Recognition.
Nakamura, J. (2006). Basics of image sensors, in J. Nakamura (ed.), Image Sensors and Signal
Processing for Digital Still Cameras, CRC Press, pp. 53–94.
Thevenaz, P. & Unser, M. (1998). A Pyramid Approach to Subpixel Registration Based on
Intensity, IEEE Transactions on Image Processing 7(1): 27–41.
Tico, M. (2008a). Adaptive block-based approach to image stabilization, Proc. of the IEEE Inter-
national Conference of Image Processing (ICIP), Vol. 1, San Diego, CA, USA, pp. 521–524.
Tico, M. (2008b). Multiframe image denoising and stabilization, Proc. of the 15th European
Signal Processing Conference (EUSIPCO), Lausanne, Switzerland.
Tico, M. & Kuosmanen, P. (2003). Fingerprint matching using an orientation-based minutia
descriptor, IEEE Trans. on Pattern Analysis and Machine Intelligence 25(8): 1009–1014.
Tico, M., Trimeche, M. & Vehviläinen, M. (2006). Motion blur identification based on dif-
ferently exposed images, Proc. of the IEEE International Conference of Image Processing
(ICIP), Atlanta, GA, USA, pp. 2021–2024.
Tico, M. & Vehviläinen, M. (2005). Constraint motion filtering for video stabilization, Proc.
of the IEEE International Conference of Image Processing (ICIP), Vol. 3, Genova, Italy,
pp. 569–572.
Tico, M. & Vehviläinen, M. (2007a). Image stabilization based on fusing the visual informa-
tion in differently exposed images, Proc. of the IEEE International Conference of Image
Processing (ICIP), Vol. 1, San Antonio, TX, USA, pp. 117–120.
Tico, M. & Vehviläinen, M. (2007b). Robust image fusion for image stabilization, IEEE In-
ternational Conference on Acoustics, Speech, and Signal Processing (ICASSP), Honolulu,
USA.
Wang, Y., Ostermann, J. & Zhang, Y.-Q. (2002). Video Processing and Communications, Prentice
Hall.
You, Y.-L. & Kaveh, M. (1996). A regularization approach to joint blur identification and image
restoration, IEEE Trans. on Image Processing 5(3): 416–428.
Yuan, L., Sun, J., Quan, L. & Shum, H.-Y. (2007). Image deblurring with blurred/noisy image
pairs, ACM Transactions on Graphics 26(3).
Zitova, B. & Flusser, J. (2003). Image registration methods: a survey, Image and Vision Comput-
ing 21: 977–1000.
33.
About array processingmethods for image segmentation 15
X
About array processing methods for image
segmentation
J. Marot, C. Fossati
Institut Fresnel (Ecole Centrale Marseille)
France
Y. Caulier
Fraunhofer Institute IIS
Germany
1. Introduction
Shape description is an important goal of computational vision and image processing.
Giving the characteristics of lines or distorted contours is faced in robotic way screening,
measuring of wafer track width in microelectronics, aerial image analysis, vehicle trajectory
and particle detection. Distorted contour retrieval is also encountered in medical imaging. In
this introduction, we firstly present classical methods that were proposed to solve this
problem, that is, Snakes and levelset methods (Kass et al., 1988; Xu & Prince, 1997; Zhu &
Yuile, 1996; Osher & Sethian, 1988; Paragios & Deriche, 2002). We secondly present original
methods which rely on signal generation out of an image and adaptation of high resolution
methods of array processing (Aghajan & Kailath, 1993a; Aghajan, 1995; Bourennane &
Marot, 2006; Marot & Bourennane, 2007a; Marot & Bourennane, 2007b; Marot &
Bourennane, 2008).
A Snake is a closed curve which, starting from an initial position, evolves towards an object
of interest under the influence of forces (Kass et al., 1988; Xu & Prince, 1997; Zhu & Yuile,
1996; Xianhua & Mirmehdi, 2004; Cheng & Foo 2006; Brigger et al., 2000) Snakes methods
are edge-based segmentation schemes which aim at finding out the transitions between
uniform areas, rather than directly identifying them (Kass et al., 1988; Xu & Prince, 1997).
Another model of active contour is geodesic curves or "levelset". Its main interest with
respect to Snakes is to be able to face changes in topology, to the cost of a higher
computational load (Osher & Sethian, 1988; Paragios & Deriche 2002; Karoui et al., 2006).
We describe here more precisely Snakes type methods because they are edge-based methods
as well as the proposed array processing methods. Edge-based segmentation schemes have
improved, considering robustness to noise and sensitivity to initialization (Xu & Prince,
1997). Some active contour methods were combined with spline type interpolation to reduce
the number of control points in the image (Brigger et al. 2000). This increases the robustness
to noise and computational load. In particular, (Precioso et al., 2005) uses smoothing splines
in the B-spline interpolation approach of (Unser et al. 1993). In (Xu & Prince, 1997) the
proposed "Gradient Vector Flow" (GVF) method provides valuable results, but is prone to
2
34.
Recent Advances inSignal Processing
16
shortcomings: contours with high curvature may be skipped unless an elevated
computational load is devoted. Concerning straight lines in particular, in (Kiryati &
Brucktein, 1992; Sheinval & Kiryati, 1997) the extension of the Hough transform retrieves the
main direction of roughly aligned points. This method gives a good resolution even with
noisy images. Its computational load is elevated. Least-squares fit of straight lines seeks to
minimize the summation of the squared error-of-fit with respect to measures (Gander et al.,
1994; Connel & Jain, 2001). This method is sensitive to outliers.
An original approach in contour estimation consists in adapting high-resolution methods of
array processing (Roy & Kailath, 1989; Pillai & Kwon, 1989; Marot et al., 2008) for straight
line segmentation (Aghajan & Kailath, 1993a; Aghajan, 1995; Aghajan & Kailath, 1993b;
Halder et al., 1995; Aghajan & Kailath, 1994; Aghajan & Kailath, 1992). In this framework, a
straight line in an image is considered as a wave-front. Now, high-resolution methods of
array processing have improved for several years (Roy & Kailath, 1989; Bourennane et al.,
2008). In particular, sensitivity to noise has improved, and the case of correlated sources is
faced by a "spatial smoothing" procedure (Pillai & Kwon 1989). To adapt high-resolution
methods of array processing to contour estimation in images, the image content is
transcripted into a signal through a specific generation scheme, performed on a virtual set of
sensors located along the image side. In (Abed-Meraim & Hua, 1997), a polynomial phase
model for the generated signal is proposed to take into account the image discretization, for
an improved straight line characterization. The ability of high-resolution methods to handle
correlated sources permitted to handle the case of parallel straight lines in image
understanding (Bourennane & Marot, 2006; Bourennane & Marot, 2005). Optimization
methods generalized straight line estimation to nearly straight distorted contour estimation
(Bourennane & Marot, 2005; Bourennane & Marot, 2006b; Bourennane & Marot, 2006c).
Circular and nearly circular contour segmentation (Marot & Bourennane, 2007a; Marot &
Bourennane, 2007b) was also considered. While straight and nearly straight contours are
estimated through signal generation on linear antenna, circular and nearly circular contour
segmentation is performed through signal generation upon circular antenna. We adapt the
shape of the antenna to the shape of the expected contours so we are able to apply the same
high-resolution and optimization methods as for straight and nearly straight line retrieval.
In particular array processing methods for star-shaped contour estimation provide a
solution to the limitation of Snakes active contours concerning contours with high concavity
(Marot & Bourennane, 2007b). The proposed multiple circle estimation method retrieves
intersecting circles, thus providing a solution to levelset-type methods.
The remainder of the chapter is organized as follows: We remind in section 2 the formalism
that adapts the estimation of straight lines as a classical array processing problem. The study
dedicated to straight line retrieval is used as a basis for distorted contour estimation (see
section 3). In section 4 we set the problem of star-shaped contour retrieval and propose a
circular antenna to retrieve possibly distorted concentric circles. In section 5 we summarize
the array processing methods dedicated to possibly distorted linear and circular contour
estimation. We emphasize the similarity between nearly linear and nearly circular contour
estimation. In section 6 we show how signal generation on linear antenna yields the
coordinates of the center of circles. In section 7 we describe a method for the estimation of
intersecting circles, thereby proposing a solution to a limitation of the levelset type
algorithms. In section 8 we propose some results through various applications: robotic
vision, omni directional images, and medical melanoma images.
35.
About array processingmethods for image segmentation 17
2. Straight contour estimation
2.1 Data model, generation of the signals out of the image data
To adapt array processing techniques to distorted curve retrieval, the image content must be
transcripted into a signal. This transcription is enabled by adequate conventions for the
representation of the image, and by a signal generation scheme (Aghajan, 1995; Aghajan &
Kailath, 1994). Once a signal has been created, array processing methods can be used to
retrieve the characteristics of any straight line. Let I be the recorded image (see Fig.1 (a).).
Fig. 1. The image model (see Aghajan & Kailath, 1992):
(a) The image-matrix provided with the coordinate system and the linear array of N
equidistant sensors,
(b) A straight line characterized by its angle and its offset 0
x .
We consider that I contains d straight lines and an additive uniformly distributed noise. The
image-matrix is the discrete version of the recorded image, compound of a set of N C pixel
values. A formalism adopted in (Aghajan & Kailath, 1993) allows signal generation, by the
following computation:
C
k
,.......,N
i
jµk),
(
exp
I(i,k)
z(i)
1
1
(1)
Where
C
,...,
k
;
N
,...,
i
);
k
,
i
(
I 1
1
denote the image pixels. Eq. (1) simulates a linear
antenna: each row of the image yields one signal component as if it were associated with a
sensor. The set of sensors corresponding to all rows forms a linear antenna. We focus in the
following on the case where a binary image is considered. The contours are composed of 1-
valued pixels also called "edge pixels", whereas 0-valued pixels compose the background.
When d straight lines, with parameters angle
k
and offset )
d
,...,
k
(
x k 1
0 , are crossing the
image, and if the image contains noisy outlier pixels, the signal generated on the ith sensor,
in front of the ith row, is (Aghajan & Kailath, 1993):
d
k
k
k i
n
jµx
exp
)
tan
i
(jµ
exp
z(i)
1
0
1
(2)
36.
Recent Advances inSignal Processing
18
Where µ is a propagation parameter (Aghajan & Kailath, 1993b) and n(i) is due to the noisy
pixels on the ith row.
Defining
k
k
k
k
i jµx
exp
s
,
tan
i
jµ
exp
a 0
1
, Eq. (2) becomes:
N
,...,
i
,
i
n
s
a
z(i)
d
k
k
k
i 1
1
(3)
Grouping all terms in a single vector, Eq. (3) becomes:
n
s
A
z
θ , with
d
1 θ
,...,
θ
θ a
a
A where
T
k
N
k
k
k a
,...,
a
,
a
2
1
a , with
N
,...,
i
,
tan
i
jµ
exp
a k
k
i 1
1
, superscript T denoting transpose. SLIDE (Subspace-
based Line DEtection) algorithm (Aghajan & Kailath, 1993) uses TLS-ESPRIT (Total-Least-
Squares Estimation of Signal Parameters via Rotational Invariance Techniques) method to
estimate the angle values.
To estimate the offset values, the "extension of the Hough transform" (Kiryati & Bruckstein,
1992) can be used. It is limited by its high computational cost and the large required size for
the memory bin. (Bourennane & Marot, 2006a; Bourennane & Marot, 2005) developed
another method. This method remains in the frame of array processing and reduces the
computational cost: A high-resolution method called MFBLP (Modified Forward Backward
Linear Prediction) (Bourennane & Marot, 2005) is associated with a specific signal
generation method, namely the variable parameter propagation scheme (Aghajan & Kailath,
1993b). The formalism introduced in that section can also handle the case of straight edge
detection in gray-scale images (Aghajan & Kailath, 1994).
In the next section, we consider the estimation of the straight line angles and offsets, by
reviewing the SLIDE and MFBLP methods.
2.2 Angle estimation, overview of the SLIDE method
The method for angles estimation falls into two parts: the estimation of a covariance matrix
and the application of a total least squares criterion.
Numerous works have been developed in the frame of the research of a reliable estimator of
the covariance matrix when the duration of the signal is very short or the number of
realizations is small. This situation is often encountered, for instance, with seismic signals.
To cope with it, numerous frequency and/or spatial means are computed to replace the
temporal mean. In this study the covariance matrix is estimated by using the spatial mean
(Halder & al., 1995). From the observation vector we build K vectors of length M
with 1
d
N
M
d . In order to maximize the number of sub-vectors we choose K=N+1-
M. By grouping the whole sub-vectors obtained in matrix form, we obtain :
K
K ,...,z
z
Z 1
,
where K
,...,
l
,
s l
l
M
l 1
n
A
z . Matrix
d
1 θ
,...,
θ
θ a
a
AM is a Vandermonde type
one of size M x d. Signal part of the data is supposed to be independent from the noise; the
components of noise vector l
n are supposed to be uncorrelated, and to have identical
variance. The covariance matrix can be estimated from the observation sub-vectors as it is
performed in (Aghajan & Kailath, 1992). The eigen-decomposition of the covariance matrix
is, in general, used to characterize the sources by subspace techniques in array processing. In
the frame of image processing the aim is to estimate the angle of the d straight lines.
Several high-resolution methods that solve this problem have been proposed (Roy &
Kailath, 1989). SLIDE algorithm is applied to a particular case of an array consisting of two
37.
About array processingmethods for image segmentation 19
identical sub-arrays (Aghajan & Kailath, 1994). It leads to the following estimated angles
(Aghajan & Kailath, 1994):
k
k
k ln
Im
*
µ
tan
ˆ
1
1
(4)
where
d
,...,
k
,
k 1
are the eigenvalues of a diagonal unitary matrix that relates the
measurements from the first sub-array to the measurements resulting from the second sub-
array. Parameter is the propagation constant, and Δ is the distance between two sensors.
TLS-ESPRIT method used by SLIDE provides the estimated parameters in closed-form, in
opposite to the Hough transform which relies on maxima research (Kiryati & Bruckstein,
1992). Offset estimation exploits the estimated straight lines angles.
2.3 Offset estimation
The most well-known offset estimation method is the "Extension of the Hough Transform"
(Sheinvald & Kiryati, 1997). Its principle is to count all pixel aligned on several orientations.
The expected offset values correspond to the maximum pixel number, for each orientation
value. The second proposed method remains in the frame of array processing: it employs a
variable parameter propagation scheme (Aghajan, 1993; Aghajan & Kailath, 1993b; Aghajan
& Kailath, 1994) and uses a high resolution method. This high resolution "MFBLP" method
relies on the concept of forward and backward organization of the data (Pillai & Kwon,
1989; Halder, Aghajan et al., 1995; Tufts & Kumaresan, 1982). A variable speed propagation
scheme (Aghajan & Kailath, 1993b; Aghajan & Kailath, 1994), associated with "MFBLP"
(Modified Forward Backward Linear Prediction) yields offset values with a lower
computational load than the Extension of the Hough Transform. The basic idea in this
method is to associate a propagation speed which is different for each line in the image
(Aghajan & Kailath, 1994). By setting artificially a propagation speed that linearly depends
on row indices, we get a linear phase signal. When the first orientation value is considered,
the signal received on sensor )
N
,...
i
(
i 1
is then:
1
1
1
0 1
d
k
k i
n
tan
i
j
exp
)
x
j
(
exp
z(i)
(5)
1
d is the number of lines with angle 1
. When varies linearly as a function of the line
index the measure vector z contains a modulated frequency term. Indeed we set
1
i
.
1
1
1
2
0 1
1
d
k
k i
n
tan
i
j
exp
)
x
i
j
(
exp
z(i)
(6)
This is a sum of 1
d signals that have a common quadratic phase term but different linear
phase terms. The first treatment consists in obtaining an expression containing only linear
terms. This goal is reached by dividing z(i) by the non zero term
1
2
1 1
tan
i
j
exp
)
(
ai
. We obtain then:
38.
Recent Advances inSignal Processing
20
1
1
0
1
d
k
k i
'
n
x
i
j
exp
i
w
(7)
The resulting signal appears as a combination of 1
d sinusoids with frequencies:
1
0
1
2
d
,...,
k
,
x
f k
k
(8)
Consequently, the estimation of the offsets can be transposed to a frequency estimation
problem. Estimation of frequencies from sources having the same amplitude was considered
in (Tufts & Kumaressan, 1982). In the following a high resolution algorithm, initially
introduced in spectral analysis, is proposed for the estimation of the offsets.
After adopting our signal model we adapt to it the spectral analysis method called modified
forward backward linear prediction (MFBLP) (Tufts & Kumaresan, 1982) for estimating the
offsets: we consider k
d straight lines with given angle k
, and apply the MFBLP method, to
the vector w . Details about MFBLP method applied to offset estimation are available in
(Bourennane & Marot, 2006a). MFBLP estimates the values of 1
1 d
,...,
k
,
fk . According to
Eq. (8) these frequency values are proportional to the offset values, the proportionality
coefficient being
. The main advantage of this method comes from its low computational
load. Indeed the complexity of the variable parameter propagation scheme associated with
MFBLP is much less than the complexity of the Extension of the Hough Transform as soon
as the number of non zero pixels in the image increases. This algorithm enables the
characterization of straight lines with same angle and different offset.
3. Nearly linear contour retrieval
In this section, we keep the same signal generation formalism as for straight line retrieval.
The more general case of distorted contour estimation is proposed. The reviewed method
relies on constant speed signal generation scheme, and on an optimization method.
3.1 Initialization of the proposed algorithm
To initialize our recursive algorithm, we apply SLIDE algorithm, which provides the
parameters of the straight line that fits the best the expected distorted contour. In this
section, we consider only the case where the number d of contours is equal to one. The
parameters angle and offset recovered by the straight line retrieval method are employed to
build an initialization vector 0
x , containing the initialization straight line pixel positions:
T
tan
N
x
,...,
tan
x
,
x
1
0
0
0
0
x
Fig.2 presents a distorted curve, and an initialization straight line that fits this distorted
curve.
39.
About array processingmethods for image segmentation 21
Fig. 2. A model for an image containing a distorted curve
3.2 Distorted curve: proposed algorithm
We aim at determining the N unknowns N
,...,
i
,
i
x 1
of the image, forming a vector
input
x , each of them taken into account respectively at the th
i sensor:
N
,...,
i
,
i
jµx
exp
i
z 1
(9)
The observation vector is
T
N
jµx
exp
,...,
jµx
exp
1
input
z (1
0)
We start from the initialization vector 0
x , characterizing a straight line that fits a locally
rectilinear portion of the expected contour. The values N
,...,
i
,
i
x 1
can be expressed as:
N
,...,
i
,
i
x
tan
i
x
i
x 1
1
0
where
i
x
is the pixel shift for row i between a
straight line with parameters and the expected contour. Then, with k indexing the steps
of this recursive algorithm, we aim at minimizing
2
x
for
estimated
input
k k
z
z
x
J
(11)
where . represents the N
C norm. For this purpose we use fixed step gradient method:
N
k
:
k
k
1
k x
x
x J
, is the step for the descent. At this point, by minimizing
criterion J (see Eq. (11)), we find the components of vector x leading to the signal z which
is the closest to the input signal in the sense of criterion J . Choosing a value of µ which is
small enough (see Eq. (1)) avoids any phase indetermination. A variant of the fixed step
gradient method is the variable step gradient method. It consists in adopting a descent step
which depends on the iteration index. Its purpose is to accelerate the convergence of
gradient. A more elaborated optimization method based on DIRECT algorithm (Jones et al.,
1993) and spline interpolation (Marot & Bourennane, 2007a) can be adopted to reach the
global minimum of criterion J of Eq. (11). This method is applied to modify recursively
signal k
x
for
estimated
z : at each step of the recursive procedure vector k
x is computed by
making an interpolation between some "node" values that are retrieved by DIRECT. The
40.
Recent Advances inSignal Processing
22
interest of the combination of DIRECT with spline interpolation comes from the elevated
computational load of DIRECT. Details about DIRECT algorithm are available in (Jones et
al., 1993). Reducing the number of unknown values retrieved by DIRECT reduces drastically
its computational load. Moreover, in the considered application, spline interpolation
between these node values provides a continuous contour. This prevents the pixels of the
result contour from converging towards noisy pixels. The more interpolation nodes, the
more precise the estimation, but the slower the algorithm.
After considering linear and nearly linear contours, we focus on circular and nearly circular
contours.
4. Star-shape contour retrieval
Star-shape contours are those whose radial coordinates in polar coordinate system are
described by a function of angle values in this coordinate system. The simplest star-shape
contour is a circle, centred on the origin of the polar coordinate system.
Signal generation upon a linear antenna yields a linear phase signal when a straight line is
present in the image. While expecting circular contours, we associate a circular antenna with
the processed image. By adapting the antenna shape to the shape of the expected contour,
we aim at generating linear phase signals.
4.1 Problem setting and virtual signal generation
Our purpose is to estimate the radius of a circle, and the distortions between a closed
contour and a circle that fits this contour. We propose to employ a circular antenna that
permits a particular signal generation and yields a linear phase signal out of an image
containing a quarter of circle. In this section, center coordinates are supposed to be known,
we focus on radius estimation, center coordinate estimation is explained further. Fig. 3(a)
presents a binary digital image I . The object is close to a circle with radius value r and
center coordinates
c
c m
,
l . Fig. 3(b) shows a sub-image extracted from the original image,
such that its top left corner is the center of the circle. We associate this sub-image with a set
of polar coordinates
, , such that each pixel of the expected contour in the sub-image is
characterized by the coordinates
,
r , where
is the shift between the pixel of the
contour and the pixel of the circle that roughly approximates the contour and which has
same coordinate . We seek for star-shaped contours, that is, contours that can be described
by the relation:
f
where f is any function that maps
2
0, to
R . The point with
coordinate 0
corresponds then to the center of gravity of the contour.
Generalized Hough transform estimates the radius of concentric circles when their center is
known. Its basic principle is to count the number of pixels that are located on a circle for all
possible radius values. The estimated radius values correspond to the maximum number of
pixels.
41.
About array processingmethods for image segmentation 23
Fig. 3. (a) Circular-like contour, (b) Bottom right quarter of the contour and pixel
coordinates in the polar system
, having its origin on the center of the circle. r is the
radius of the circle.
is the value of the shift between a pixel of the contour and the pixel
of the circle having same coordinate
Contours which are approximately circular are supposed to be made of more than one pixel
per row for some of the rows and more than one pixel per column for some columns.
Therefore, we propose to associate a circular antenna with the image which leads to linear
phase signals, when a circle is expected. The basic idea is to obtain a linear phase signal
from an image containing a quarter of circle. To achieve this, we use a circular antenna. The
phase of the signals which are virtually generated on the antenna is constant or varies
linearly as a function of the sensor index. A quarter of circle with radius r and a circular
antenna are represented on Fig.4. The antenna is a quarter of circle centered on the top left
corner, and crossing the bottom right corner of the sub-image. Such an antenna is adapted to
the sub-images containing each quarter of the expected contour (see Fig.4). In practice, the
extracted sub-image is possibly rotated so that its top left corner is the estimated center. The
antenna has radius
R so that s
N
R 2
where s
N is the number of rows or columns in
the sub-image. When we consider the sub-image which includes the right bottom part of the
expected contour, the following relation holds:
c
c
s m
N
,
l
N
max
N
where c
l and c
m
are the vertical and horizontal coordinates of the center of the expected contour in a
cartesian set centered on the top left corner of the whole processed image (see Fig.3).
Coordinates c
l and c
m are estimated by the method proposed in (Aghajan, 1995), or the
one that is detailed later in this paper.
Signal generation scheme upon a circular antenna is the following: the directions adopted
for signal generation are from the top left corner of the sub-image to the corresponding
sensor. The antenna is composed of S sensors, so there are S signal components.
42.
Recent Advances inSignal Processing
24
Fig. 4. Sub-image, associated with a circular array composed of S sensors
Let us consider i
D , the line that makes an angle i
with the vertical axis and crosses the top
left corner of the sub-image. The th
i component
S
,...,
i 1
of the z generated out of the
image reads:
s
i
N
m
,
l
D
m
,
l
m
,
l
m
l
j
exp
m
,
l
I
i
z
1
2
2
(12)
The integer l (resp. m ) indexes the lines (resp. the columns) of the image. j stands for
1
. µ is the propagation parameter (Aghajan & Kailath, 1994). Each sensor indexed by i
is associated with a line i
D having an orientation
S
i
i
2
1
. In Eq. (2), the term
m
,
l
means that only the image pixels that belong to i
D are considered for the generation of the
th
i signal component. Satisfying the constraint i
D
m
,
l , that is, choosing the pixels that
belong to the line with orientation i
, is done in two steps: let setl be the set of indexes
along the vertical axis, and setm the set of indexes along the horizontal axis. If i
is less than
or equal to 4
,
s
N
:
setl 1
and
i
s tan
.
N
:
setm
1
. If i
is greater than 4
,
s
N
:
setm 1
and
i
s tan
.
N
:
setl
2
1 . Symbol
. means integer part. The minimum
number of sensors that permits a perfect characterization of any possibly distorted contour
is the number of pixels that would be virtually aligned on a circle quarter having
radius s
N
2 . Therefore, the minimum number S of sensors is s
N
2 .
4.2 Proposed method for radius and distortion estimation
In the most general case there exists more than one circle for one center. We show how
several possibly close radius values can be estimated with a high-resolution method. For
this, we use a variable speed propagation scheme toward circular antenna. We propose a
method for the estimation of the number d of concentric circles, and the determination of
43.
About array processingmethods for image segmentation 25
each radius value. For this purpose we employ a variable speed propagation scheme
(Aghajan & Kailath, 1994). We set
1
i
µ , for each sensor indexed by S
,...,
i 1
. From Eq.
(12), the signal received on each sensor is:
d
k
k S
,...,
i
,
i
n
r
i
j
exp
i
z
1
1
1
(13)
where d
,...,
k
,
rk 1
are the values of the radius of each circle, and
i
n is a noise term that
can appear because of the presence of outliers. All components
i
z compose the
observation vector z . TLS-ESPRIT method is applied to estimate d
,...,
k
,
rk 1
, the number
of concentric circles d is estimated by MDL (Minimum Description Length) criterion. The
estimated radius values are obtained with TLS-ESPRIT method, which also estimated
straight line orientations (see section 2.2).
To retrieve the distortions between an expected star-shaped contour and a fitting circle, we
work successively on each quarter of circle, and retrieve the distortions between one quarter
of the initialization circle and the part of the expected contour that is located in the same
quarter of the image. As an example, in Fig.3, the right bottom quarter of the considered
image is represented in Fig. 3(b). The optimization method that retrieves the shift values
between the fitting circle and the expected contour is the following:
A contour in the considered sub-image can be described in a set of polar coordinates by :
S
,...,
i
,
i
,
i 1
. We aim at estimating the S unknowns S
,...,
i
,
i 1
that characterize
the contour, forming a vector:
T
S
,...,
,
2
1
ρ (14)
The basic idea is to consider that ρ can be expressed as:
T
S
r
,...,
r
,
r
2
1
ρ (see Fig. 3), where r is the radius of a circle that
approximates the expected contour.
5. Linear and circular array for signal generation: summary
In this section, we present the outline of the reviewed methods for contour estimation.
An outline of the proposed nearly rectilinear distorted contour estimation method is given
as follows:
Signal generation with constant parameter on linear antenna, using Eq. 1;
Estimation of the parameters of the straight lines that fit each distorted contour (see
subsection 3.1);
Distortion estimation for a given curve, estimation of x , applying gradient
algorithm to minimize a least squares criterion (see Eq. 11).
The proposed method for star-shaped contour estimation is summarized as follows:
Variable speed propagation scheme upon the proposed circular antenna :
Estimation of the number of circles by MDL criterion, estimation of the radius of
each circle fitting any expected contour (see Eqs. (12) and (13) or the axial
parameters of the ellipse;
Estimation of the radial distortions, in polar coordinate system, between any
expected contour and the circle or ellipse that fits this contour. Either the
44.
Recent Advances inSignal Processing
26
gradient method or the combination of DIRECT and spline interpolation may be
used to minimize a least-squares criterion.
Table 1 provides the steps of the algorithms which perform nearly straight and nearly
circular contour retrieval. Table 1 provides the directions for signal generation, the
parameters which characterize the initialization contour and the output of the optimization
algorithm.
Table 1. Nearly straight and nearly circular distorted contour estimation: algorithm steps.
The current section presented a method for the estimation of the radius of concentric circles
with a priori knowledge of the center. In the next section we explain how to estimate the
center of groups of concentric circles.
6. Linear antenna for the estimation of circle center parameters
Usually, an image contains several circles which are possibly not concentric and have
different radii (see Fig. 5). To apply the proposed method, the center coordinates for each
feature are required. To estimate these coordinates, we generate a signal with constant
propagation parameter upon the image left and top sides. The th
l signal component,
generated from the th
l row, reads:
N
m
lin jµm
exp
m
,
l
I
l
z
1
where µ is the
propagation parameter. The non-zero sections of the signals, as seen at the left and top sides
of the image, indicate the presence of features. Each non-zero section width in the left
(respectively the top) side signal gives the height (respectively the width) of the
corresponding expected feature. The middle of each non-zero section in the left (respectively
the top) side signal yields the value of the center c
l (respectively c
m ) coordinate of each
feature.
45.
About array processingmethods for image segmentation 27
Fig. 5. Nearly circular or elliptic features. r is the circle radius, a and b are the axial
parameters of the ellipse.
7. Combination of linear and circular antenna for intersecting circle retrieval
We propose an algorithm which is based on the following remarks about the generated
signals. Signal generation on linear antenna yields a signal with the following
characteristics: The maximum amplitude values of the generated signal correspond to the
lines with maximum number of pixels, that is, where the tangent to the circle is either
vertical or horizontal. The signal peak values are associated alternatively with one circle and
another. Signal generation on circular antenna yields a signal with the following
characteristics: If the antenna is centered on the same center as a quarter of circle which is
present in the image, the signal which is generated on the antenna exhibits linear phase
properties (Marot & Bourennane, 2007b)
We propose a method that combines linear and circular antenna to retrieve intersecting
circles. We exemplify this method with an image containing two circles (see Fig. 6(a)). It falls
into the following parts:
Generate a signal on a linear antenna placed at the left and bottom sides of the
image;
Associate signal peak 1 (P1) with signal peak 3 (P3), signal peak 2 (P2) with signal
peak 4 (P4);
Diameter 1 is given by the distance P1-P3, diameter 2 is given by the distance P2-
P4;
Center 1 is given by the mid point between P1 and P3, center 2 is given by the mid
point between P2 and P4;
Associate the circular antenna with a sub-image containing center 1 and P1,
perform signal generation. Check the phase linearity of the generated signal;
Associate the circular antenna with a sub-image containing center 2 and P4,
perform signal generation. Check the linearity of the generated signal.
Fig. 6(a) presents, in particular, the square sub-image to which we associate a circular
antenna. Fig. 6(b) and (c) shows the generated signals.
46.
Recent Advances inSignal Processing
28
Fig. 6. (a) Two intersecting circles, sub-images containing center 1 and center 2; signals
generated on (b) the bottom of the image, (c) the left side of the image.
8. Results
The proposed star-shaped contour detection method is first applied to a very distorted
circle, and the results obtained are compared with those of the active contour method GVF
(gradient vector flow) (Xu & Prince, 1997). The proposed multiple circle detection method is
applied to several application cases: robotic vision, melanoma segmentation, circle detection
in omnidirectional vision images, blood cell segmentation. In the proposed applications, we
use GVF as a comparative method or as a complement to the proposed circle estimation
method. The values of the parameters for GVF method (Xianghua & Mirmehdi, 2004) are the
following. For the computation of the edge map: 100 iterations; 09
0,
µGVF (regularization
coefficient); for the snakes deformation: 100 initialization points and 50
iterations; 2
0.
GVF
(tension); 03
0.
GVF
(rigidity); 1
GVF
(regularization coefficient);
8
0.
GVF
(gradient strength coefficient). The value of the propagation parameter values
for signal generation in the proposed method are 1
µ and 3
10
5
.
8.1 Hand-made images
In this subsection we first remind a major result obtained with star-shaped contours, and
then proposed results obtained on intersecting circle retrieval.
8.1.1 Very distorded circles
The abilities of the proposed method to retrieve highly concave contours are illustrated in
Figs. 7 and 8. We provide the mean error value over the pixel radial coordinate
E
M . We
notice that this value is higher when GVF is used, as when the proposed method is used.
47.
About array processingmethods for image segmentation 29
Fig. 7. Examples of processed images containing the less (a) and the most (d) distorted
circles, initialization (b,e) and estimation using GVF method (c,f).
E
M =1.4 pixel and 4.1
pixels.
Fig. 8. Examples of processed images containing the less (a) and the most (d) distorted
circles, initialization (b,e) and estimation using GVF method (c,f).
E
M =1.4 pixel and 2.7
pixels.
48.
Recent Advances inSignal Processing
30
8.1.2 Intersecting circles
We first exemplify the proposed method for intersecting circle retrieval on the image of Fig.
9(a), from which we obtain the results of Fig. 9(b) and (c), which presents the signal
generated on both sides of the image. The signal obtained on left side exhibits only two peak
values, because the radius values are very close to each other. Therefore signal generation
on linear antenna provides a rough estimate of each radius, and signal generation on
circular antenna refines the estimation of both values.
The center coordinates of circles 1 and 2 are estimated as
41
83
1
1 ,
m
,
l c
c
and
84
83
2
2 ,
m
,
l c
c . Radius 1 is estimated as 24
1
r , radius 2 is estimated as 30
2
r .
The computationally dominant operations while running the algorithm are signal
generation on linear and circular antenna. For this image and with the considered parameter
values, the computational load required for each step is as follows:
signal generation on linear antenna: 2
10
8
3
. sec.;
signal generation on circular antenna: 1
10
8
7
. sec.
So the whole method lasts 1
10
1
8
. sec. For sake of comparison, generalized Hough
transform with prior knowledge of the radius of the expected circles lasts 2.6 sec. for each
circle. Then it is 6.4 times longer than the proposed method.
Fig. 9. (a) Processed image; signals generated on: (b) the bottom of the image; (c) the left side
of the image.
The case presented in Figs. 10(a) and 10(b), (c) illustrates the need for the last two steps of
the proposed algorithm. Indeed the signals generated on linear antenna present the same
peak coordinates as the signals generated from the image of Fig. 7(a). However, if a
subimage is selected, and the center of the circular antenna is placed such as in Fig. 7, the
phase of the generated signal is not linear. Therefore, for Fig. 10(a), we take as the diameter
values the distances P1-P4 and P2-P3. The center coordinates of circles 1 and 2 are estimated
as
55
68
1
1 ,
m
,
l c
c and
99
104
2
2 ,
m
,
l c
c . Radius of circle 1 is estimated as 87
1
r ,
radius of circle 2 is estimated as 27
2
r .
49.
About array processingmethods for image segmentation 31
Fig. 10. (a) Processed image; signals generated on: (b) the bottom of the image; (c) the left
side of the image.
Here was exemplified the ability of the circular antenna to distinguish between ambiguous
cases.
Fig. 11 shows the results obtained with a noisy image. The percentage of noisy pixels is 15%,
and noise grey level values follow Gaussian distribution with mean 0.1 and standard
deviation 0.005. The presence of noisy pixels induces fluctuations in the generated signals,
Figs. 11(b) and 11(c) show that the peaks that permit to characterize the expected circles are
still dominant over the unexpected fluctuations. So the results obtained do not suffer the
influence of noise pixels. The center coordinates of circles 1 and 2 are estimated
as
88
131
1
1 ,
m
,
l c
c and
144
53
2
2 ,
m
,
l c
c . Radius of circle 1 is estimated as 67
1
r ,
radius of circle 2 is estimated as 40
2
r .
Fig. 11. (a) Processed image; signals generated on: (b) the bottom of the image; (c) the left
side of the image.
8.2 Robotic vision
We now consider a real-world image coming from biometrics (see Fig. 12(a)). This image
contains a contour with high concavity.
Fig. 12(b) gives the result of the initialization of our optimization method. Fig. 12(c) shows
that GVF fails to retrieve the furthest sections of the narrow and deep concavities of the
hand, that correspond to the two right-most fingers. Fig. 12(d) shows that the proposed
method for distortion estimation manages to retrieve all pixel shift values, even the elevated
50.
Recent Advances inSignal Processing
32
ones. We also noticed that the computational time which is required to obtain this result
with GVF is 25-fold higher than the computational time required by the proposed method:
400 sec. are required by GVF, and 16 sec. are required by our method.
Fig. 12. Hand localization: (a) Processed image, (b) initialization, (c) final result obtained
with GVF, (d) final result obtained with the proposed method
8.3 Omnidirectionnal images
Figures 13(a), (b), (c) show three omnidirectional images, obtained with a hyperbolic mirror.
For some images it is useful to remove to parasite circles due to the acquisition system.
The experiment illustrated on Fig. 14 is an example of characterization of two circles that
overlap. Figures 14(a), (b), (c), show for one image the gradient image, the threshold image,
the signal generated on the bottom side of the image (Marot & Bourennane, 2008). The
samples for which the generated signal takes none zero values (see Fig. 14(c)) delimitate the
external circle of Fig. 13(a).
The diameter of the big circle is 485 pixels and the horizontal coordinate of its center is 252
pixels. This permits first to erase the external circle, secondly to characterize the intern circle
by the same method.
Fig. 13. Omnidirectional images
51.
About array processingmethods for image segmentation 33
Fig. 14. Circle characterization by signal generation
8.4 Cell segmentation
Fig. 15 presents the case of a real-world image. It contains one red cell and one white cell.
Our goal in this application is to detect both cells. The minimum value in the signal
generated on bottom side of the image corresponds to the frontier between both cells. The
width of the non-zero sections on both sides of the minimum value is the diameter of each
cell. Each peak value in each generated signal provides one center coordinate.
Fig. 15. Blood cells: (a) processed image; (b) superposition processed image and result;
signals generated on: (c) the bottom of the image; (d) the left side of the image.
8.5 Melanoma segmentation
Fig. 16 concerns quantitative analysis in a medical application. More precisely, the purpose
of the experiment is to detect the frontier of a melanoma. The melanoma was chosen
randomly out of a database (Stolz et al., 2003).
52.
Recent Advances inSignal Processing
34
Fig. 16. Melanoma segmentation: (a) processed image, (b) elliptic approximation by the
proposed array processing method, (c) result obtained by GVF.
The proposed array processing method detects a circular approximation of the melanoma
borders (Marot & Bourennane, 2007b; Marot & Bourennane, 2008) (see Fig 16(b)). A few
iterations of GVF method (Xu & Prince, 1997) yield the contour of the melanoma (see Fig
16(c)). Such a method can be used to control automatically the evolution of the surface of the
melanoma.
9. Conclusion
This chapter deals with contour retrieval in images. We review the formulation and
resolution of rectilinear or circular contour estimation. The estimation of the parameters of
rectilinear or circular contours is transposed as a source localization problem in array
processing. We presented the principles of SLIDE algorithm for the estimation of rectilinear
contours based on signal generation upon a linear antenna. In this frame, high-resolution
methods of array processing retrieve possibly close parameters of straight lines in images.
We explained the principles of signal generation upon a virtual circular antenna. The
circular antenna permits to generate linear phase signals out of an image containing circular
features. The same signal models as for straight line estimation are obtained, so high-
resolution methods of array processing retrieve possibly close radius values of concentric
circles. For the estimation of distorted contours, we adopted the same conventions for signal
generation, that is, either a linear or a circular antenna. For the first time, in this book
chapter, we propose an intersecting circle retrieval method, based on array processing
algorithms. Signal generation on a linear antenna yields the center coordinates and radii of
all circles. Circular antenna refines the estimation of the radii and distinguishes ambiguous
cases. The proposed star-shaped contour estimation method retrieves contours with high
concavities, thus providing a solution to Snakes based methods. The proposed multiple
circle estimation method retrieves intersecting circles, thus providing a solution to levelset-
type methods. We exemplified the proposed method on hand-made and real-world images.
Further topics to be studied are the robustness to various types of noise, such as correlated
Gaussian noise.
53.
About array processingmethods for image segmentation 35
10. References
Abed-Meraim, K. & Hua, Y. (1997). Multi-line fitting and straight edge detection using
polynomial phase signals, ASILOMAR31, Vol. 2, pp. 1720-1724, 1997.
Aghajan, H. K. & Kailath, T. (1992). A subspace Fitting Approach to Super Resolution Multi-
Line Fitting and Straight Edge Detection, Proc. of IEEE ICASSP, vol. 3, pp. 121-124,
1992.
Aghajan, H. K. & Kailath, T. (1993a). Sensor array processing techniques for super resolution
multi-line-fitting and straight edge detection, IEEE Trans. on IP, Vol. 2, No. 4, pp.
454-465, Oct. 1993.
Aghajan, H.K. & Kailath, T. (1993b). SLIDE: subspace-based line detection, IEEE int. conf.
ASSP, Vol. 5, pp. 89 - 92, April 27-30, 1993.
Aghajan, H. & Kailath, T. (1995). SLIDE: Subspace-based Line detection, IEEE Trans. on
PAMI, 16(11):1057-1073, Nov. 1994.
Aghajan, H.K. (1995). Subspace Techniques for Image Understanding and Computer Vision,
PhD Thesis, Stanford University, 1995
Bourennane, S. & Marot, J. (2005). Line parameters estimation by array processing methods,
IEEE ICASSP, Vol. 4, pp. 965-968, Philadelphie, Mar. 2005.
Bourennane, S. & Marot, J. (2006a). Estimation of straight line offsets by a high resolution
method, IEE proceedings - Vision, Image and Signal Processing, Vol. 153, issue 2, pp.
224-229, 6 April 2006.
Bourennane, S. & Marot, J. (2006b). Optimization and interpolation for distorted contour
estimation, IEEE-ICASSP, vol. 2, pp. 717-720, Toulouse, France, April 2006.
Bourennane, S. & Marot, J. (2006c). Contour estimation by array processing methods,
Applied signal processing, article ID 95634, 15 pages, 2006.
Bourennane, S.; Fossati, C. & Marot, J., (2008). About noneigenvector source localization
methods EURASIP Journal on Advances in Signal Processing Vol. 2008, Article ID
480835, 13 pages doi:10.1155/2008/480835
Brigger, P. ; Hoeg, J. & Unser, M. (2000). B-Spline Snakes: A Flexible Tool for Parametric
Contour Detection, IEEE Trans. on IP, vol. 9, No. 9, pp. 1484-96, 2000.
Cheng, J. & Foo, S. W. (2006). Dynamic directional gradient vector flow for snakes, IEEE
Trans. on Image Processing, vol. 15, no. 6, pp.1563-1571, June 2006.
Connell, S. D. & Jain, A. K. (2001). Template-based online character recognition, Pattern
Rec., vol. 34, no 1, pp: 1-14, 2001.
Gander, W.; Golub, G.H. & Strebel, R. (1994). Least-squares fitting of circles and ellipses ,
BIT, n. 34, pp. 558-578, 1994.
Halder, B. ; Aghajan, H. & T. Kailath (1995). Propagation diversity enhancement to the
subspace-based line detection algorithm, Proc. SPIE Nonlinear Image Processing VI
Vol. 2424, p. 320-328, pp. 320-328, March 1995.
Jones, D.R. ; Pertunen, C.D. & Stuckman, B.E. (1993). Lipschitzian optimization without the
Lipschitz constant, Journal of Optimization and Applications, vol. 79, no. 157-181, 1993.
Karoui, I.; Fablet, R.; Boucher, J.-M. & Augustin, J.-M. (2006). Region-based segmentation
using texture statistics and level-set methods, IEEE ICASSP, pp. 693-696, 2006.
Kass, M.; Witkin, A. & Terzopoulos, D. (1998). Snakes: Active Contour Model, Int. J. of
Comp. Vis., pp.321-331, 1988
Kiryati, N. & Bruckstein, A.M. (1992). What's in a set of points? [straight line fitting], IEEE
Trans. on PAMI, Vol. 14, No. 4, pp.496-500, April 1992.
54.
Recent Advances inSignal Processing
36
Marot, J. & Bourennane, S. (2007a). Array processing and fast Optimization Algorithms
for Distorted Circular Contour Retrieval , EURASIP Journal on Advances in Signal
Processing, Vol. 2007, article ID 57354, 13 pages, 2007.
Marot, J. & Bourennane, S. (2007b). Subspace-Based and DIRECT Algorithms for Distorted
Circular Contour Estimation, IEEE Trans. On Image Processing, Vol. 16, No. 9, pp.
2369-2378, sept. 2007.
Marot, J., Bourennane, S. & Adel, M. (2007). Array processing approach for object
segmentation in images, IEEE ICASSP'07, Vol. 1, pp. 621-24, April 2007.
Marot, J. & Bourennane, S. (2008). Array processing for intersecting circle retrieval,
EUSIPCO'08, 5 pages, Aug. 2008.
Marot, J.; Fossati, C.; & Bourennane, S. (2008) Fast subspace-based source localization
methods IEEE-Sensor array multichannel signal processing workshop, Darmstadt
Germany, 07/ 2008
Osher, S. & Sethian, J. (1998). Fronts propagating with curvature-dependent speed:
algorithms based on Hamilton-Jacobi formulations, J. Comput. Phys. , Vol. 79, pp.
12-49, 1988.
Paragios, N. & Deriche, R. (2002). Geodesic Active Regions and Level Set Methods for
Supervised Texture Segmentation, Int'l Journal of Computer Vision, Vol. 46, No 3, pp.
223-247, Feb. 2002.
Pillai, S.U. & Kwon, B.H. (1989). Forward/backward spatial smoothing techniques for
coherent signal identification, Proc. of IEEE trans. on ASSP, vol. 37 (1), pp. 8-15,
1989.
Precioso, F. ; Barlaud, M. ; Blu, T. & Unser, M. (2005). Robust Real-Time Segmentation of
Images and Videos Using a Smooth-Spline Snake-Based Algorithm, IEEE Trans. on
IP, Vol. 14, No. 7, pp. 910-924, July 2005.
Roy, R. & Kailath, T. (1989). ESPRIT: Estimation of signal parameters via rotational
invariance techniques, IEEE Trans. on ASSP, vol. 37, no. 7, pp. 984-995, 1989.
Sheinvald, J. & Kiryati,N. (1997). On the Magic of SLIDE, Machine Vision and Applications,
Vol. 9, pp. 251-261, 1997.
Stolz, W. ; Horsch, A. ; Pompl, R. ; Abmayr, W. ; Landthaler, M. (2003) Datensatz
Dermatology Skin Surface Microscopy Melanocytic Lesions 749, Version 1.0,
October 2003 (D-SSM-ML-749 V1.0).
Tufts, D.W. & Kumaresan, R. (1982). Estimation of frequencies of multiple sinusoids:
making linear prediction perform like maximum likelihood, Proc. IEEE, vol. 70, pp.
975-989, sept. 1982.
Unser, M. ; Aldroubi, A. & Eden, M. (1993). B-spline signal processing: Part I-theory; part II-
efficient design and applications, IEEE Trans. on SP, Vol. 41, No. 2, pp. 821-848, Feb.
1993.
Xianghua X. & Mirmehdi, M. (2004). RAGS: region-aided geometric snake , IEEE Trans. IP,
Vol. 13, no. 5, pp: 640-652, May 2004.
Xu, C. & Prince, J.L. (1997). Gradient vector flow: a new external force for snakes, Proceeding
of IEEE Computer Society Conference on Computer -Vision and Pattern Recognition pp.
66-71, Jun. 1997.
Zhu, S. C. & Yuille, A. (1996). Region Competition: Unifying Snakes, Region Growing, and
Bayes /MDL for Multiband Image Segmentation, IEEE Trans. on PAMI, Vol. 18, No.
9, pp. 884-900, Sept. 1996.
“No, of courseI never love you any less. Did the time seem long to you
while I was away?”
“Oh! yes, mamma! But luckily I have had a new maid for three weeks.
Father must have written you that he discharged the other one, didn’t he?”
“Yes, dear.”
“Oh! I like the new one ever so much better! If you knew how nice she
is! and not a bit stupid, nor vulgar! She speaks very correctly, and yet she
came right from her village; she has never lived out, but she learned her
duties instantly.”
“Who brought her here?”
“Comtois. He had excellent recommendations.”
Madame de Noirmont smiled at the serious tone in which her daughter
spoke.
“My dear girl,” she replied, “I know that we may rely on Comtois.—
What is your new maid’s name?”
“Louise—Louise Fré—Frénet—I never can remember her other name.
But no matter, she’s a very nice girl, I tell you, mamma; I am sure that you
will like her too. I am going to call her, to show her to you. She’s very shy,
that is why she hasn’t come to pay her respects to you.”
“Mon Dieu! my dear love, I have plenty of time to see your maid; there
is no hurry about it.”
“Oh, yes! I want you to see her right away, mamma.”
Ernestine rang a bell; in a moment the door opened and Louise appeared
in the doorway, timid and with downcast eyes.
“Did madame ring for me?” she murmured.
Madame de Noirmont scrutinized the girl, whom she then saw for the
first time; she was struck by her beauty, by the dignified expression of her
features, by her modest and reserved demeanor, by her whole aspect, which
was not what one ordinarily sees in a lady’s maid. She could not tire of
looking at her.
Ernestine leaned toward her mother and whispered:
“Well! what do you think of her?”
“Lovely, my child, lovely; she has an air of distinction too; no one would
think that she was a servant.”
57.
“I didn’t flatterher, did I?—Mamma thinks that you are lovely, Louise,”
continued the girl; “she likes you too. I told you that she would like you.”
Louise made a curtsy and murmured:
“Madame is very kind; I will do my best to satisfy her, and
mademoiselle too.”
“I don’t doubt it, my child,” replied Madame de Noirmont; “everything
prepossesses me in your favor, and I am convinced that my daughter is not
mistaken in all the good that she has told me of you.”
While Ernestine’s mother was speaking, Louise raised her eyes and
looked at her. At sight of that beautiful, noble and stern face, of that pale
and haughty brow, of those great black eyes wherein one could always
detect a melancholy expression, the girl felt deeply moved and impressed;
her heart beat violently, whether with pleasure or fear she did not know; she
could not define her feelings, but she did not speak or move. For some
moments after Madame de Noirmont ceased speaking, she continued to
listen; they motioned to her that she might retire, and she remained. At last
Ernestine had to touch her arm and say: “You may leave us, Louise,” before
she came to herself and left the room, casting a last furtive glance at
Madame de Noirmont.
After a few more words concerning the new lady’s maid, Madame de
Noirmont turned all her attention to taking up the threads of her usual
domestic occupations, and to superintending her daughter’s education and
her studies with the different teachers who came to the house to give her
lessons.
Madame de Noirmont’s life was very regular; she rarely went out and
received few visits; she devoted herself to her daughter, overlooked her
studies and read a great deal: that was her greatest pleasure, her most
agreeable means of distraction.
Monsieur de Noirmont passed the whole day in his study; his wife and
daughter saw little of him before dinner. At that repast they met, and not
infrequently some old friend of Monsieur de Noirmont dined with them, but
they very rarely had more than one guest. During dinner Madame de
Noirmont talked very little, while her husband discussed politics or
economic matters with his guest. Ernestine alone did anything to enliven
the party. She succeeded very well; her childish sallies and observations
often made her mother smile; and even Monsieur de Noirmont, despite his
58.
gravity, could notalways keep a sober face. In the evening, the ladies
worked, made tapestry, or sang, and the men played chess or backgammon.
When there were no guests at dinner, Monsieur de Noirmont often went out
in the evening to some party or reception; sometimes his wife and daughter
accompanied him, but rarely. Madame de Noirmont preferred to remain at
home with Ernestine; and when her husband was not there, she seemed less
serious, less pensive, and she manifested her affection for Ernestine more
freely.
Louise’s duties were very pleasant in that family, where the ladies did
not go to balls and received very little company. Comtois alone waited at
table. The young lady’s maid assisted the ladies to dress; then, during
almost all the remainder of the day, she worked in her room, making dresses
for mademoiselle or keeping the linen of the household in order. In the
evening, she served at tea, then looked to it that her mistresses had
everything in their room that they required. This was not very wearisome,
and Louise sometimes told Ernestine that they did not give her enough
work to do; but the girl would reply, with a smile:
“What makes you work so fast? We no sooner give you a piece of
sewing to do than it is done. Mamma says that your activity and skill are
most unusual. Other lady’s maids don’t work so fast, I promise you!”
Louise felt a thrill of pleasure whenever she was told that Madame de
Noirmont was pleased with her. And although that lady always preserved a
grave and serious manner with her servants, which made the slightest
approach to familiarity impossible, she felt drawn to love her, and it seemed
to her that it would be a source of deep grief to her if she should now be
compelled to leave her.
Meanwhile three months had passed since she came to Paris, and she had
not once seen Chérubin. But since Madame de Noirmont’s return, Louise,
engrossed by the desire to please her, had felt her love-pangs less sharply;
although she still loved her old playmate as dearly as ever, another
sentiment had glided into her heart, to distract her thoughts from her
troubles.
Monsieur Gérondif had called several times to inquire of Comtois what
Louise’s employers thought of her, and each time the old servant put forth
all his eloquence in praise of the young lady’s maid and begged the
professor to thank old Jasmin for the present he had sent them. Monsieur
59.
Gérondif went awayoverjoyed that he had brought Louise to Paris,
although Chérubin, entirely absorbed by his bonnes fortunes, had forgotten
about going to see Nicole.
One morning, when Monsieur Gérondif called at Monsieur de
Noirmont’s to ask Comtois if they were still content with Louise, the valet
replied:
“Yes, indeed; Mademoiselle Louise is a model of virtue and industry. If
you would like to see her, monsieur, she is alone at this moment; the ladies
have gone out to do some shopping. She is working in her room, and there
is no reason why you should not go up and bid her good-morning.”
Monsieur Gérondif joyfully accepted the proposition; he followed
Comtois, who led him to Louise’s chamber and left him with her.
Louise manifested the keenest delight at sight of the tutor, for she would
have an opportunity to talk with him about all those who were dear to her.
Monsieur Gérondif, who was, like most pedants, a conceited fool, took to
himself a pleasure of which he was the pretext simply; he believed that he
had kindled a tender sentiment in the breast of the pretty lady’s maid, and
he smiled as if he would dislocate his jaw as he took his seat beside her.
Louise began by inquiring for her adopted mother.
“She is perfectly well, and she is overjoyed that you are in such a fine
position in Paris,” replied the tutor, lying with imperturbable coolness; for
he had not been to the village since Louise left it.
“And Monsieur Chérubin?” continued Louise, “is he pleased to know
that I am in Paris as he wished? Hasn’t he any desire to see me? Doesn’t he
ever speak to you about me? Did he send you here to-day?”
The tutor scratched his nose, coughed, spat, wiped his forehead, all of
which operations required much time with him, during which he considered
what he should say. Having made up his mind at last, he said to Louise:
“My dear child, it rarely happens that childish loves come to a good end.
I might cite Paul and Virginie and a thousand other examples ad hoc; I
prefer to tell you ex abrupto—which means, without preamble—that you
are making a mistake to give any further thought to Monsieur le Marquis de
Grandvilain, because that young man never gives a thought to you. In the
first place, when you came to see him at his house—when you came to
Paris with Nicole——”
60.
“Well, monsieur?”
“Well, theyoung marquis was at home; but as he didn’t want to see you,
he gave his concierge orders to tell you that he was away.”
“O mon Dieu! is it possible?”
“Amid the debauchery in which he is plunged, how do you expect him to
remember a young country girl with whom he used to play puss-in-the-
corner, and other more or less innocent games? He has become a great rake,
has my pupil; he has a lot of mistresses. It isn’t my fault. He receives so
many billets-doux that it’s perfectly scandalous, and I should have left his
house before this if my financial interests did not oblige me to close my
eyes,—which however, does not prevent my seeing whatever happens.”
Louise put her handkerchief to her eyes and faltered:
“So it’s all over—he doesn’t love me at all! Who would have believed it
of Chérubin?”
“One must believe everything, expect everything from a beardless
youth,” replied the tutor.
Then, drawing his chair close to the girl’s, and laying his hand on her
knee, Monsieur Gérondif tried to assume a mellifluous voice and began,
weighing his words:
“I have made the wound, and it is for me to apply the balsam, otherwise
called the remedy.—Lovely Louise, although young Chérubin has not been
true to your charms, there are others who will be too happy to offer incense
to them, to cultivate them. I go straight to the point: I love you, divine
maiden! and I am not fickle, because, thank heaven, I am a grown man. I
have not come to make any base propositions to you—retro, Satanas!
which means: I have only honorable views. I offer you my hand, my heart,
my name, my rank and my title; but we will wait two years before we
marry. I will try to restrain my passions for that length of time, which I
require in order to amass a tidy sum of money. You will contribute your
wages, your savings; they are much pleased with you here, and it is
probable that you will receive a handsome present at New Year’s. We will
put it all together and buy a little house in the outskirts of Paris; I will take a
few pupils to keep my hand in; we will have a dog, a cat, chickens, all the
pleasant things of life, and our days will be blended of honey and
hippocras.”
61.
During this harangue,Louise had pushed away the hand that Monsieur
Gérondif had laid on her knee, and had moved her chair away; and as soon
as he had finished speaking, she rose and said to him in a courteous but
determined tone:
“I thank you, monsieur, for condescending to offer me, a poor village
girl, without name or family, the title of your wife; but I cannot accept it.
Monsieur Chérubin no longer loves me; I can understand that, monsieur,
and indeed I was mad to imagine that, in Paris, in the midst of pleasures,
living in the whirl of society, he would remember me. But it is altogether
different with me! I have not become a great lady, and the image of the man
I love can never be effaced from my heart. I love Chérubin; I feel that I
shall never love anybody else! So, monsieur, it would be very wicked of me
to marry another man, as I could not give that other my love.”
Monsieur Gérondif was greatly surprised by this speech; he recovered
himself, however, and replied:
“My sweet Louise, varium et mutabile semper femina; or, if you prefer:
'souvent femme varie, bien fol est qui s’y fie.’—Woman changes ever; he is
a great fool who trusts her.—The latter lines are by François I; I prefer
Beranger’s.—Tiresias declares that men have only three ounces of love,
while women have nine, which enables them to change oftener than we do;
and yet, with only three ounces, we do pretty well.”
“What does all this mean, monsieur?”
“It means, my dear love, that you will do like the others: you will
change; your love will pass away.”
“Never, monsieur.”
“Never is a word that means nothing at all in love. However, you will
have plenty of time to think about it, as I give you two years for reflection.
Until then, allow me to hope.”
“Oh! it is useless, monsieur.”
“I beg pardon; by hoping one lives content, and I cling to my hope.
Adieu, fair Louise; continue to behave becomingly; your remuneration will
be increased doubtless, and I shall continue to put mine aside; and, as a very
trivial but very shrewd popular proverb says: ‘Let’s let the mutton boil!’—I
lay my homage at your feet.”
62.
Monsieur Gérondif tookhis leave, and Louise was at liberty to weep
without restraint. She did not bestow a thought on the tutor’s offers, she
thought only of Chérubin, who no longer loved her, who had ceased to
think of her, and who had mistresses. She had been afraid for a long time
that he had forgotten her; but now she was certain of it, and it is a far cry
from fear to certainty, in love.
The return of Madame de Noirmont and her daughter forced Louise to
conceal her tears. She hastily wiped her eyes and tried to dissemble her
depression, for she felt that she must not betray the secret of her heart.
On that day Monsieur de Noirmont went out after dinner. Ernestine
remained with her mother, to whom, as they worked, she said whatever
came into her head, especially as she saw that it was one of her moments of
good humor. When Madame de Noirmont smiled at her daughter’s
speeches, the latter was so delighted that she often laid her work aside to
throw her arms about her mother’s neck, who sometimes held her lovingly
to her heart for some moments.
Louise, for whom they rang to order tea, entered the salon at one of the
times when Madame de Noirmont’s arms were about her daughter; and the
sweet child, in her joy at being so fondled, cried out:
“See how happy I am, Louise! see what a dear, good mother I have!”
Louise stood still in the middle of the salon; she was glad for Ernestine’s
happiness, and yet, in the touching picture before her eyes, there was
something that hurt her, she did not understand why. Two great tears
escaped from her eyes; but she turned quickly, so that they might not see
her weeping.
Meanwhile Madame de Noirmont had resumed her grave demeanor, and
Ernestine had had to return to her seat. Louise served the tea as quickly as
possible, then left the room, fearing that her sadness would be noticed.
Despite all her efforts to be calm, Louise was still crying when Ernestine
entered her room to ask her some question, before going to bed. Seeing that
Louise’s face was wet with tears, her young mistress ran to her, and said
with the most touching interest:
“Mon Dieu! crying, Louise! What’s the matter?”
“Oh! excuse me, mademoiselle. I know that I should not weep here,
where everyone is so kind to me; but I could not help it!”
63.
“Have you somereason for being unhappy? You would not cry like this
for nothing. Louise, I insist on knowing why you were crying.”
“Well, mademoiselle, it is because, when I saw you in your mother’s
arms to-night, the picture of the happiness you enjoy made me feel more
keenly than ever the misery of my position. Oh! mademoiselle, it isn’t envy
that makes me say it! I bless Heaven for making you so happy; but I could
not help crying when I remembered that my mother never kissed me, that I
shall never be able to throw my arms about her!”
“What’s that you say, my poor Louise? Doesn’t your mother love you?”
“It isn’t that, mademoiselle. But listen, I am going to tell you the truth,
for I don’t know how to lie. And then, I don’t understand why I should
make a mystery of it; you won’t be any less kind to me when you know that
I am a poor girl, abandoned by her parents.”
“Is it possible? you haven’t any parents?”
“At all events, mademoiselle, I don’t know them.”
Thereupon Louise proceeded to tell Ernestine the story of how Nicole
had been employed to take care of her, and of the kindness of the village
people, who had kept her and treated her like their daughter, when they
found that she was abandoned by her mother.
Ernestine listened to the story with the deepest interest. When Louise
had ceased to speak, she kissed her affectionately, saying:
“Poor Louise! Oh! how glad I am you have told me that! It seems to me
that I love you even more since I know that your parents have abandoned
you. And that dear, good Nicole! those kind peasants! Ah! what splendid
people they are! I will tell mamma all about it to-morrow! I am sure that it
will interest her too.”
“Oh! that isn’t worth while, mademoiselle; Madame de Noirmont may
not like it because I have told you about my troubles.”
“I assure you, on the contrary, that, for all her serious manner, mamma is
kind and good; and, besides, she likes you very much. She has said to me
several times that your manners were just what they should be, and that is
great praise from her, I tell you!—Well, good-night, Louise, sleep soundly,
and don’t cry any more. If you haven’t any parents, you have some people
here who love you dearly and who will take good care of you.”
64.
Ernestine left Louise,to go to bed, and the latter felt less unhappy when
she saw her young mistress’s affection for her—an affection which she
shared with all the sincerity of her soul.
The next morning the Noirmont family met at the breakfast table.
Ernestine had not seen her mother since the preceding night, because a
headache had kept Madame de Noirmont in bed later than usual; but her
father, who rarely appeared at breakfast, had just taken his seat, when
Ernestine, after kissing her mother, said in a mysterious tone:
“I have something very interesting to tell you this morning, and I am
glad papa came to breakfast, to hear what I am going to say.”
“Really?” said Monsieur de Noirmont, smiling, and in a tone of mild
raillery. “From the way in which you say that, I imagine that it must really
be something most serious.”
“Why, yes, papa, it’s very serious! Oh! you look as if you were laughing
at me, but when you know what it is, I’ll bet that you will be as touched as I
was last night when I found poor Louise crying!”
“What! is it something about Louise?” asked Madame de Noirmont, with
an air of deep interest; “can it be that anything has gone wrong with her? I
should be extremely sorry, for the girl is a very good girl indeed, and seems
to deserve our kindness.”
“This is what it is; listen. Louise didn’t want me to tell you; but I am
very sure that you won’t blame her for it; it isn’t her fault.”
Monsieur de Noirmont, whose interest was aroused by this exordium,
said impatiently:
“Come, my child, go on, explain yourself.”
“Well, papa, last evening, when Louise came to the salon to serve the
tea, she found me in mamma’s arms, and we were kissing each other.”
“That is well, my daughter; what next?”
“At night, when I went up to bed, as I couldn’t find a fichu that I wanted,
I went to Louise’s room to ask her where she had put it. I found her crying
hard, and I asked her why she was crying. She replied, sobbing: ‘Oh!
mademoiselle, because, when I saw you in your mother’s arms to-night, I
felt more keenly than ever my misfortune in never having been kissed by
my mother, and in being only an abandoned child.’”
65.
“An abandoned child!”murmured Madame de Noirmont, whose face
instantly became deathly pale.
“But,” said Monsieur de Noirmont, “if I am not mistaken, Comtois told
us that the girl’s parents lived in the outskirts of Paris—I don’t remember in
what village.”
“Yes, papa, that is what Comtois was told when Louise was brought
here; but that was a lie that her friends thought they ought to tell. Louise
thought it was better to tell the truth.”
“She is right. But call your maid, Ernestine; I want to hear the whole
story from her own lips. It has roused my curiosity. And you, madame—are
not you curious to hear this girl’s story?”
Madame de Noirmont replied with a few almost unintelligible words; it
was as if she were oppressed by some secret suffering, which she was doing
her utmost to conceal.
Meanwhile, Ernestine had not waited for her father to repeat his request;
she had run off to call Louise, who soon appeared before the assembled
family.
Monsieur de Noirmont looked at her with more interest than he had
previously displayed; Ernestine smiled at her affectionately; Madame de
Noirmont lowered her eyes and became paler than ever. From the
disquietude that had taken possession of her, from the anxiety that could be
read upon her features, one would have taken her for a criminal awaiting
judgment.
“Come, Louise, come nearer,” said Monsieur de Noirmont, motioning to
her; “my daughter has told us of what you told her last evening. Do not
tremble, my child; we shall not reproach you for telling us what was not
true when you entered our service.”
“Oh! it was not I, monsieur!” murmured Louise.
“I know it, it was the person who obtained the situation for you, who
thought it his duty to tell that falsehood.—So you do not know your parents,
my poor girl?”
“No, monsieur.”
“Where were you brought up?”
“At Gagny, monsieur.”
66.
“At Gagny. Ah!that’s it; I had forgotten the name of the village that you
told me when you came here.—And the people who brought you up?”
“A kindhearted peasant woman, Nicole Frimousset. She was nursing
Monsieur Chérubin de Grandvilain at the time.”
“Indeed! so this woman was the young Marquis de Grandvilain’s
nurse?”
“Yes, monsieur, he is my foster-brother, and in my childhood we played
together all the time.”
“Very good! But that doesn’t tell us how you went to Gagny.”
“Mon Dieu! monsieur, it was a lady—my mother, I suppose—who
carried me to dear Nicole’s, and begged her to take me to nurse. I was then
a year old; she left some money with Nicole and went away, saying that she
would come again. The next year she sent a little more money by a
messenger from Paris; but she didn’t come to see me, and no one ever after
came to inquire for me.”
“But what was the lady’s name; where did she live?”
“Nicole didn’t think to ask her any of those questions; for she could not
dream that she would abandon me, that she would never come again. The
messenger from Paris did not know who the lady was who hired him on the
street, he could not tell my good nurse anything.”
“But was no paper, no mark found on you or on your clothing?”
“Nothing, monsieur, absolutely nothing.”
“That is very strange.—Don’t you agree with me, madame?”
As he asked this question Monsieur de Noirmont turned to his wife,
whom he had not looked at while questioning Louise; Ernestine, whose
eyes followed her father’s, uttered a piercing shriek.
“Oh dear!” she cried, “mamma has fainted!”
Madame de Noirmont’s head had fallen against the back of her chair; she
had in fact lost consciousness, and the livid pallor of her face made her
condition seem most alarming.
They hastened to her assistance; Ernestine wept and lamented as she
kissed her mother again and again. Louise shared her distress; she lost her
head, did not know what to do, and did not hear what was said to her. But
Monsieur de Noirmont, who retained all his presence of mind, called
67.
Comtois, and, withhis assistance, carried his wife to her room and laid her
on her bed.
After some time, Madame de Noirmont came to herself; but there was a
look of gloom and anxiety in her eyes, which indicated that the cause of her
trouble still existed. She turned her eyes slowly on her husband and her
daughter; then, as she caught sight of Louise, who was a little farther away
and who seemed to share the general anxiety, she closed her eyes and let her
head fall back on the pillow.
“Mamma, dear mamma, how do you feel now?” cried Ernestine,
squeezing her mother’s hand.
“Better, my dear, I feel better.”
“What was the cause of your sudden illness, madame?” asked Monsieur
de Noirmont with interest. “You gave us a terrible fright.”
“Why, I have no idea, monsieur. I had a sudden feeling of suffocation;
then a cold perspiration broke out all over me, and I lost the use of my
senses.”
“You didn’t feel well this morning, you had a headache,” said Ernestine.
“Yes, that is true,” replied Madame de Noirmont hastily. “I felt poorly
this morning, and that is the cause, no doubt——”
“And then Louise’s story must have grieved you, made your heart ache.
That probably made you worse.”
“Do you wish me to send for the doctor, madame?”
“No, monsieur, it is not necessary; I need nothing but rest and quiet—
and a little sleep, perhaps.”
“We will leave you, then.”
“But I shall be close by,” said Ernestine, “and I will come at the slightest
sound.”
Madame de Noirmont seemed most desirous to be left alone. All the
others went away, Ernestine still deeply moved because she had seen her
mother in a swoon, and Louise very much cast down because she feared
that the story of her misfortunes had touched her mistress too deeply.
Madame de Noirmont passed the rest of the day in her room; she kept
her bed and expressed a wish to be alone. The next day passed in the same
way; and for several days she did not leave her bed.
68.
She refused tosee a doctor, however, and declared that her trouble
required no other remedy than rest.
But from the first moment of her illness, it was evident that Madame de
Noirmont’s humor had changed: she hardly spoke; sometimes her
daughter’s presence seemed irksome to her; she answered her curtly and
received her caresses without warmth. As for Louise, while her mistress
kept her room, she persistently declined her services on the pretext that she
did not require them.
Poor Louise was greatly distressed.
“Madame your mother,” she said to Ernestine, “will not let me wait on
her, or even go into her room. I am afraid that I have displeased her,
mademoiselle; perhaps she does not like to have in her house a girl whose
parents are not known.”
Ernestine tried to comfort her, saying:
“You are wrong. Why should you think that mamma has anything
against you? No, it is this trouble of hers, it’s her nerves that make her
depressed and irritable. Why, she even pushes me away now when I kiss
her, and she doesn’t kiss me; that makes me unhappy too, but I am sure that
mamma still loves me.”
As she spoke, the sweet child shed tears, and Louise mingled hers with
them, for she could think of no other consolation to give her.
Madame de Noirmont made up her mind at last to leave her room, and
she went down to the salon. The first time that Louise saw her, she longed
to ask about her health, but she dared not; her mistress’s eyes seemed to
avoid hers, and she did not display her former kindliness to her. For the
merest trifle, Madame de Noirmont lost patience, scolded and became
angry; sometimes she gave Louise ten contradictory orders in the same
minute. The poor girl lost her head, was bewildered, did not know what to
do, while Ernestine gazed at her mother with a surprised and grieved
expression, when she saw her treat her protégée so harshly.
Sometimes, however, a violent change seemed to take place in that
strange creature; after speaking sharply and severely to Louise, Madame de
Noirmont, remarking the poor girl’s heartbroken expression, would
suddenly change her tone; her eyes would fill with tears and follow
Louise’s every movement; then she would call her in a gentle, affectionate,
even tender voice, and the girl would return instantly, joyous and eager; but
69.
her mistress’s facewould already have resumed its stern expression, and
she would motion her away, muttering curtly:
“What do you want? I didn’t call you.”
Several weeks passed in this way. One morning, Madame de Noirmont,
who seemed even more thoughtful than usual, said to her daughter when
she came to kiss her:
“Really, I don’t propose to keep your maid; the girl is good for nothing;
we must dismiss her. We will pay her two or three months’ wages more than
is due her. Tell her, and advise her to return to her village; I think that she
made a great mistake in coming to Paris to seek employment. Do not try to
change my decision, it would do no good.”
Ernestine was in despair; she was very fond of Louise, and it would be a
real sorrow to her to part with her; but her mother had spoken in such a
stern and decided tone that the poor child dared not reply. She said nothing,
but lowered her eyes with a sigh, and left the room to perform the
distressing duty with which her mother had entrusted her. As she left her
mother’s apartment, Ernestine met Monsieur de Noirmont, who came up to
her and kissed her, and said, observing her sorrowful air:
“What is it, my child? You look as if you had been crying!”
“It’s nothing, papa.”
“You know, Ernestine, that I do not like evasions or mysteries; I insist
upon knowing at once what makes you unhappy this morning.”
“Well, papa, it’s because mamma is going to send Louise away, poor
Louise, our maid, who is so sweet, and whom I love so dearly. But mamma
doesn’t like her any more; she says that Louise isn’t good for anything; but
Louise works just as much as she ever did, and she sews like an angel. But
as mamma insists, I am going to tell Louise, so that she——”
“Don’t go to her, my child, it is not necessary; Louise will stay in this
house.”
“But, papa, when mamma told me——”
“I tell you the opposite, my child, and I am the only master here.”
Ernestine said no more, for her father had assumed a severe expression
which in him denoted that he had formed a resolution which no one could
change. Monsieur de Noirmont then went to his wife and said to her in a
cold and impressive tone:
70.
“Your humor isvery capricious, madame, as anyone may see by the way
in which you treat your daughter sometimes; but you extend it to
defenceless servants also, and that is what I cannot endure. This young
Louise, who came here to wait upon Ernestine, is honest and virtuous; her
appearance is as becoming as her manners; I think that it would be difficult
to find another so satisfactory; and yet you propose to dismiss her, madame
—you expect me to turn a good girl out of my house, because, for some
unknown reason, she has ceased to please you; because your fanciful humor
makes you more difficult than ever to serve!—No, madame, that shall not
be; I propose to be just before everything, and this girl shall remain in my
house, because it would be unjust to send her away.”
Madame de Noirmont had not a word to say in reply; she hung her head
and seemed completely crushed.
71.
PART IV
XXIV
THE POLISHINTRIGUE
Chérubin did not see Daréna for a week; he fretted and fumed with
impatience, fearing that his intrigue with the pretty Pole had fallen through
altogether; and, as is always the case, he became immeasurably more
enamored of the object of his passion as his fear of not possessing her
increased. It was for the purpose of giving him time to reach that climax of
passion, that Daréna, who was thoroughly acquainted with the human heart,
had allowed several days to elapse without going to see him.
At last Daréna appeared at the hôtel de Grandvilain one morning, hurried
and breathless, like a man who had galloped twelve leagues without a halt.
He pushed old Jasmin aside and almost knocked him down, when that
worthy retainer attempted to tell him that he did not know whether he could
see his master, who had not yet risen.
“I don’t care whether he’s up or in bed, he is always visible to me,”
replied Daréna imperiously. “Learn, you old donkey of a valet, to know the
persons whom your master is always delighted to receive.”
As he spoke, Daréna rushed into the young marquis’s bedroom, leaving
Jasmin propped against the wall, muttering in a voice that trembled with
wrath:
“Old donkey! he called me an old donkey! He’s an impertinent knave.
The Grandvilains, father or son, never called me that. He’s not a donkey,
but I have an idea that he’s a much more dangerous animal!”
Daréna reached Chérubin’s bedside and pulled the curtains aside, crying:
“Up, Joconde! up, Lovelace, Richelieu, Rochester! The moment of
triumph has arrived at last!—Sapristi! I can fairly say, my dear fellow, that I
have made myself ill for you! Ouf! I can do no more!”
72.
And Daréna threwhimself on a couch, and mopped his face with his
handkerchief.
“But what has become of you during these eight long days that I have
not once seen you, and have not known what to think of your silence?”
asked Chérubin, looking closely at his friend. “I thought that you had
forgotten me.”
“Ah! that is just like a man—a young man! Because things are not done
on the instant, you think that you are forgotten. Do I ever forget my friends?
Am I not absolutely devoted to you? If you have not heard from me for a
week, it is because I had nothing to tell you; but I have been on the lookout,
watching and waiting for the moment to act. It has come at last; I have
acted, and the fair Globeska is in our power.”
“Is it possible? Oh! do tell me how you did it, my dear Daréna?”
“Parbleu! by my ordinary method: I scattered money about. I know no
other way, especially as it always succeeds. Dress, and meanwhile I will tell
you how it all came about; but don’t call your valet; you will understand
that I can’t talk about it before a witness. I have already compromised
myself enough—but damn the odds!”
Chérubin rose and began to dress, saying:
“Go on, I am listening; I shall not lose a word.”
“You know that the pretty Pole lived with her husband in furnished
lodgings in the Marais; I succeeded in effecting the delivery of your billet-
doux by bribing a lady’s maid and two concierges. The Comtesse de
Globeska replied that she was mad over you and asked nothing better than
to leave her tyrant. That was all very well, but how were we to abduct the
young woman from a man who left her no more than her shadow? It was
very difficult. Seven days passed thus; Monsieur de Globeski did not leave
his wife for an instant. At last, yesterday, I learned from a concierge, by a
further use of money, that the Polish count had decided to leave Paris, and
that he was going to take his wife to Norway; of course, if we had had to
pursue our conquest to Norway, it would have taken us too far. I instantly
formed my resolution, saying to myself: ‘He shall not take her!’
“I learned—still by the lavish use of money—that the post-chaise was to
call for our Poles at eight in the evening. I arrived just before the hour; the
carriage came and stopped in front of the house, and I went boldly up to the
postilion and led him aside.
73.
“‘I adore thewoman who is going with you,’ I said. ‘I am going to
follow with two friends to a lonely place on the road, one or two leagues
from Paris; we shall pretend to attack you, and fire a few shots with pistols
loaded with powder only. You will stop; we will open the carriage door and
seize the young woman; then you will start off at full speed with the old
gentleman, and if he shouts to you to stop, you will pay no attention until
you have galloped at least two solid hours.’
“You will understand, my dear Chérubin, that I should not dare to make
such a proposition as that to a postilion, without supporting it by convincing
arguments. I handed him a thousand-franc note, and he turned his back,
saying:
“‘What do you take me for?’
“I added five hundred francs. He remarked that it was a very ticklish
business! I added another five hundred. He agreed to everything. That’s the
way things are done in Paris. I went off to choose two rascals on whom I
could rely, in consideration of five hundred francs, which I gave to each. I
also hired a post-chaise. When the Comte de Globeski started off with his
wife, we followed; and, about two leagues from here, between Sèvres and
Chaville, in a place where nothing grows but melons, we discharged our
pistols. The bribed postilion stopped. It was dark, and everything went off
as I had arranged. We kidnapped the young woman. The old Pole defended
her like a genuine demon; indeed, he inflicted a slight dagger wound on one
of our men in the scuffle, which forced me to disburse three hundred francs
more. However, we captured the divine Globeska, and I took her to the
house I have hired, where she passed the night and is now awaiting you.”
“Oh! what a series of events, my dear Daréna! But great heaven! this
stealing a woman from her husband, and by force! Suppose it should be
known? Isn’t it a crime?”
“Bah! are you going to have scruples now?—At all events, there was no
other way, and then, if worse comes to worst, I am the only one
compromised; but my friendship is of the sort that defies danger.”
“And the pretty Pole—where have you taken her?”
“To a little house that stands all by itself near Barrière de la Chopinette; I
could find nothing better. And then I considered that to go into the country,
at a distance from Paris, would incommode you too much. The house I have
hired is in a spot where very few people pass; the outlook is not very
74.
cheerful, but whatdo you care for that? You aren’t going to shut yourself up
with a woman, to look out of the windows at people passing, are you? Isn’t
one always happy when with the person one loves?”
“Oh, yes! of course; but in what quarter is this Barrière de la
Chopinette?”
“In the quarter of La Poudrette, and of lonely promenades, in the
direction of Ménilmontant. However, we can go there in a cab. Remember,
my dear fellow, that your charmer is waiting for you; I told the concierge of
the house to order as toothsome a breakfast as he can procure in that
quarter, and some superfine wines. Make haste and finish dressing—put on
your best clothes, perfume yourself——”
“Perfume myself? Indeed, I shall not; perfumery makes me sick.”
“As you please, but put on your armor. Lucky Chérubin! you are about
to possess one of the loveliest women I have ever seen; and her Polish
accent, too, is most fascinating.”
“And she loves me, you say? she has admitted it?”
“Parbleu! how many times must I tell you? In fact, I should say that her
conduct was quite sufficient proof of it.”
“She didn’t weep when she was kidnapped?”
“Weep! She danced—she adores dancing, it seems. By the way, I need
not tell you that I have nothing left of the funds you advanced me. The
postilion and my men to pay—the hire of the post-chaise and the house—
and all the people I bribed. In fact, you owe me fifteen hundred francs.”
“Fifteen hundred francs!” exclaimed Chérubin, as he walked to his desk;
“it costs a lot to abduct a woman!”
“To whom are you telling that? to me, who have abducted a hundred
perhaps, in the course of my life? Indeed it was in that way that I spent a
large part of my fortune; but it is a princely pleasure all the same, in which
everybody cannot indulge.”
Chérubin handed Daréna the sum that he required, and said:
“I am ready.”
“Very good; send out for a cab; you will understand that we can’t go to
your petite maison with your tilbury and your groom. You should never take
your servants into the secret of a mysterious intrigue like this; such people
are too fond of talking.”
75.
“You are right.—Holà!Jasmin!”
The old servant appeared, still with a long face, and cast an angry glance
at Daréna. Chérubin ordered him to send for a cab.
“Will not monsieur take his cabriolet?” queried Jasmin, with an
expression of surprise.
“Evidently not!” cried Daréna, laughing at Jasmin’s face; “as your
master orders a cab, he doesn’t propose to take his cabriolet. Off with you,
old ruin, and make haste, if you possibly can.”
“Old ruin!” muttered Jasmin, as he left the room. “Still another insult—
and I must swallow it all! I am very much afraid that this ne’er-do-well will
ruin my young master. I should like to know why he makes him take a cab,
when he has his own tilbury and cabriolet.”
However, Jasmin did his errand; the cab was summoned. Chérubin went
downstairs with Daréna, and they both entered the vehicle, which Jasmin
looked after, with a far from pleased expression, as it drove away.
Daréna told the driver where to take them. After quite a long drive they
stopped in front of a shabby house outside Barrière de la Chopinette, on the
outer boulevards.
“Here we are!” said Daréna, jumping out of the cab.
Chérubin looked at the house, which had but one floor above the ground
floor, with two windows on the front.
“This isn’t a very handsome house!” he exclaimed.
“It is very fine inside,” replied Daréna. “The principal thing is that it’s
isolated; the devil himself would be in it if the husband should unearth you
here! My dear fellow, when you run off with a woman, you must take the
greatest precautions. And after all, what do you care about the house? It’s
the woman that you come here to see. For my part, I should have been
perfectly happy in a shepherd’s hut, with the object of my love.—Send the
cab away; I am going to ring.”
Chérubin made haste to pay the cab-driver, who returned to his box and
drove away.
Daréna pulled a wire beside the low door that gave admission to the
house. A little fellow of some thirteen years, with an impudent expression,
whose knavish and insolent bearing harmonized well with a very dirty
costume, answered the bell, his cap over his ear, his blouse flapping in the
76.
wind, and hishands black with dirt. He bestowed a glance of intelligence on
Daréna, who recognized little Bruno, the same urchin of whom Poterne had
tried to make a monkey, and who, on his side, had conceived the idea of
appropriating the skin which he had used in studying his character. Later
Poterne had found Bruno, who had squandered his disguise; the business
agent took the liberty of thrashing the boy, then forgave him, and charmed
by the happy talents which young Bruno manifested, determined to employ
him again when the opportunity should present itself. In the scheme which
had been devised to dupe Chérubin, it was necessary to station some
intelligent person, who could be trusted, in the house which had been hired.
Poterne instantly thought of the urchin, to whom he did not pay much, and
who had all the qualities essential to forward their designs.
“Ah! this is the concierge’s son,” said Daréna, glancing at Bruno as they
entered the house, and leading Chérubin through a sort of vestibule, toward
the staircase. “Where’s your father, my boy? is he away?”
“Yes, monsieur, he had to go to a place ten leagues from here, to see my
aunt, who is very sick.”
“And you are keeping the house?”
“Yes, monsieur.”
“Has the lady who slept here had everything that she wanted?”
“Oh, yes! monsieur; don’t you be afraid; that lady hasn’t wanted for
anything. She’s upstairs. By the way, she says that she’s beginning to get
tired of being all alone.”
“Patience! monsieur here has come to keep her company.—How about
the breakfast; is it ordered?”
“Yes, monsieur; and it will be fine, I tell you. I was the one that went to
the restaurant——”
“This little rascal is overflowing with intelligence,” said Daréna, turning
to Chérubin, “and I recommend him to you in case you need anything.—
Well, my dear friend, here you are with your charmer now, and I will leave
you.”
“What! you are going to leave me?” cried Chérubin, almost in an
offended tone.
“Why, I don’t see that there is anything more for me to do here; the rest
is your business. You are going to breakfast tête-à-tête with a little
77.
foreigner, who ismad over you. Would not a third person be in the way?”
“Oh, yes! of course. Well, then, au revoir.”
“Au revoir, my dear marquis, and may love crown you with its sweetest
favors!”
Daréna smiled, almost ironically, as he shook hands with Chérubin; then
he flashed a glance at Bruno and left the house, closing the door behind
him.
Chérubin felt intensely excited when he found himself in that strange
house, in a quarter which was entirely unfamiliar to him, with no other
company than a boy who stared at him with a sly expression, as he cracked
nut after nut which he took from under his blouse.
The vestibule had two doors, both of which were open, disclosing the
interior of two rooms, in one of which the only furniture was several rickety
tables, and in the other, one table and a wretched cot bed; the windows on
the boulevard were supplied with iron bars, but entirely unprovided with
curtains.
Chérubin, who had seen this at a glance, reflected that Daréna had not
spent much money in furnishing the house. Then he turned to Bruno, who
was still breaking nuts, sometimes with his teeth and sometimes with his
feet, and humming at intervals a tune of which nothing could be heard save:
tu tu tu tu tu tu r’lu tu.
“Where is madame la comtesse’s apartment?”
“Whose?” queried the ex-bootblack, looking up with an insolent
expression.
“I ask you where the young lady is, who has been in this house since last
night?”
The boy thrust his tongue into his cheek,—a street Arab’s trick when he
proposes to lie—and answered:
“Oh, yes; the young foreign lady, who was kidnapped, and who slept
here—tu tu tu r’lu tu—she’s upstairs, on the first floor, in the finest
apartment in the house, where she’s sighing and having a stupid time—tu tu
tu r’lu tu!”
Chérubin asked no further questions; he went upstairs—there was but
one flight—and stopped at a door, the key of which was on the outside. His
heart beat very fast at the thought that he was about to stand in the presence
78.
Welcome to ourwebsite – the perfect destination for book lovers and
knowledge seekers. We believe that every book holds a new world,
offering opportunities for learning, discovery, and personal growth.
That’s why we are dedicated to bringing you a diverse collection of
books, ranging from classic literature and specialized publications to
self-development guides and children's books.
More than just a book-buying platform, we strive to be a bridge
connecting you with timeless cultural and intellectual values. With an
elegant, user-friendly interface and a smart search system, you can
quickly find the books that best suit your interests. Additionally,
our special promotions and home delivery services help you save time
and fully enjoy the joy of reading.
Join us on a journey of knowledge exploration, passion nurturing, and
personal growth every day!
ebookbell.com




















![Recent Advances in Signal Processing
4
utilizes directly the intensity information in the image pixels, without searching for specific
visual features.
In general a parametric model for the two-dimensional mapping function that overlaps an
"input" image over a "reference" image is assumed. Let us denote such mapping function by
t(x; p) = [tx(x; p) ty(x; p)]t, where x = [x y]t stands for the coordinates of an image pixel,
and p denotes the parameter vector of the transformation. Denoting the "input" and "refer-
ence" images by h and g respectively, the objective of an image based registration approach
is to estimate the parameter vector p that minimizes a cost function (e.g., the sum of square
differences) between the transformed input image h(t(x; p)) and the reference image g(x).
The minimization of the cost function, can be achieved in various ways. A trivial approach
would be to adopt an exhaustive search among all feasible solutions by calculating the cost
function at all possible values of the parameter vector. Although this method ensures the
discovery of the global optimum, it is usually avoided due to its tremendous complexity.
To improve the efficiency several alternatives to the exhaustive search technique have been
developed by reducing the searching space at the risk of losing the global optimum, e.g.,
logarithmic search, three-step search, etc, (see Wang et al. (2002)). Another category of image
based registration approaches, starting with the work of Lucas & Kanade (1981), and known
also as gradient-based approaches, assumes that an approximation to image derivatives can
be consistently estimated, such that the minimization of the cost function can be achieved
by applying a gradient-descent technique (see also Baker & Matthews (2004); Thevenaz &
Unser (1998)). An important efficiency improvement, for Lucas-Kanade algorithm, has been
proposed in Baker & Matthews (2004), under the name of "Inverse Compositional Algorithm"
(ICA). The improvement results from the fact that the Hessian matrix of the cost function,
needed in the optimization process, is not calculated in each iteration, but only once in a pre-
computation phase.
In this work we propose an additional improvement to gradient-based methods, that consists
of simplifying the repetitive image warping and interpolation operations that are required
during the iterative minimization of the cost function. Our presentation starts by introducing
an image descriptor in Section 2.1, that is less illumination dependent than the intensity com-
ponent. Next, we present our registration algorithm in Section 2.2, that is based on matching
the proposed image descriptors of the two images instead their intensity components.
2.1 Preprocessing
Most of the registration methods proposed in the literature are based on matching the inten-
sity components of the given images. However, there are also situations when the intensity
components do not match. The most common such cases are those in which the two images
have been captured under different illumination conditions, or with different exposures.
In order to cope with such cases we propose a simple preprocessing step aiming to extract an
illumination invariant descriptor from the intensity component of each image. Denoting by
H(x) the intensity value in the pixel x, and with avg(H) the average of all intensity values
in the image, we first calculate H̄(x) = H(x)/avg(H), in order to gain more independence
from the global scene illumination. Next, based on the gradient of H̄ we calculate Hg(x) =
∣H̄x(x)∣ + ∣H̄y(x)∣ in each pixel, and med(Hg) as the median value of Hg(x) over the entire
image.](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-22-320.jpg)
![Digital Image Stabilization 5
Finally, the actual descriptor that we are using in the registration operation is given by the
following binary image
h(x) =
{
1 if Hg(x) > med(Hg)
0 otherwise
(1)
2.2 Registration algorithm
In the following we describe an image based registration method that is using a multi-
resolution coarse to fine strategy. Typically in such algorithm, at each iteration step one of
the images should be warped in accordance to the parameters estimated so far. In our method
this warping operation is highly simplified on the expense of increase memory usage.
The levels of the multi-resolution representation are over-sampled, and they are obtained
by iteratively smoothing the original image descriptor h, such that to obtain smoother and
smoother versions of it. Let h̃ℓ denotes the smoothed image resulted after ℓ-th low-pass filter-
ing iterations (h̃0 = h). The smoothed image at next iteration can be calculated by applying
one-dimensional filtering along the image rows and columns as follows:
h̃ℓ+1 (x, y) = ∑
r
wr ∑
c
wch̃ℓ
(
x − 2ℓ
c, y − 2ℓ
r
)
, (2)
where wk are the taps of a low-pass filter.
The registration approach takes advantage of the fact that each decomposition level (h̃ℓ) is
over-sampled, and hence it can be reconstructed by a subset of its pixels. This property allows
to enhance the efficiency of the registration process by using only a subset of the pixels in the
registration algorithm. The advantage offered by the availability of over-sampled decompo-
sition level, is that the set of pixels that can be used in the registration is not unique. A broad
range of geometrical transformations can be approximated by simply choosing a different set
of pixels to describe the sub-sampled image level. In this way, the over-sampled image level
is regarded as a "reservoir of pixels" for different warped sub-sampled versions of the image,
which are needed at different stages in the registration algorithm.
Let xn,k = [xn,k yn,k]t, for n, k integers, denote the coordinates of the selected pixels into the
smoothed image (h̃ℓ). A low-resolution version of the image (ĥℓ) can be obtained by col-
lecting the values of the selected pixels: ĥℓ(n, k) = h̃ℓ(xn,k). Moreover, given an invertible
geometrical transformation function t(x; p), the warping version of the low resolution image
can be obtained more efficiently by simply selecting another set of pixels from the area of the
smoothed image, rather than warping and interpolating the low-resolution image ĥℓ. This is:
ĥ′
ℓ(n, k) = h̃ℓ(x′
n,k), where x′
n,k = round
(
t−1(xn,k; p)
)
.
The process described above is illustrated in Fig.3, where the images shown on the bottom
row represent two low-resolutions warped versions of the original image (shown in the top-
left corner). The two low-resolution images are obtained by sampling different pixels from
the smoothed image (top-right corner) without interpolation.
The registration method used in our approach is presented in Algorithm 1. The algorithm
follows a coarse to fine strategy, starting from a coarse resolution level and improving the pa-
rameter estimate with each finer level, as details in the Algorithm 2. The proposed algorithm
relies on matching image descriptors (1) derived from each image rather than image intensity
components.
Algorithm 2 presents the registration parameter estimation at one resolution level. In this
algorithm, the constant N0, specifies the number of iterations the algorithm is performing](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-23-320.jpg)
![Recent Advances in Signal Processing
6
50 100 150 200 250
50
100
150
200
250
50 100 150 200 250
50
100
150
200
250
5 10 15 20 25
5
10
15
20
25
5 10 15 20 25
5
10
15
20
25
Fig. 3. Low-resolution image warping by re-sampling an over-sampled image decomposition
level.
Algorithm 1 Global image registration
Input: the input and reference images plus, if available, an initial guess of the parameter
vector p = [p1 p2 ⋅ ⋅ ⋅ pK]t.
Output: the parameter vector that overlaps the input image over the reference image.
1- Calculate the descriptors (1) for input and reference images, denoted here by h and g,
respectively.
2- Calculate the decomposition levels of the two image descriptors {h̃ℓ, g̃ℓ ∣ ℓmin ≤ ℓ ≤
ℓmax}.
3- For each level ℓ between ℓmax and ℓmin, do Algorithm 2.
after finding a minima of the error function. This is set in order to reduce the chance of ending
in a local minima. As shown in the algorithm the number of iterations is reset to N0, every
time a new minima of the error function is found. The algorithm stops only if no other minima
is found in N0 iterations. In our experiments a value N0 = 10 has been used.](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-24-320.jpg)
![Digital Image Stabilization 7
Algorithm 2 Image registration at one level
Input: the ℓ-th decomposition level of the input and reference images (h̃ℓ, g̃ℓ), plus the
parameter vector p = [p1 p2 ⋅ ⋅ ⋅ pK]t estimated at the previous coarser level.
Output: a new estimate of the parameter vector pout that overlaps h̃ℓ over g̃ℓ.
Initialization: set minimum matching error Emin = ∞, number of iterations Niter = N0
1- Set the initial position of the sampling points xn,k in the vertex of a rectangular lattice
of period D = 2ℓ, over the area of the reference image g̃ℓ.
2- Construct the reference image at this level: ĝ(n, k) = g̃ℓ(xn,k).
3- For each parameter pi of the warping function calculate the image
Ji(n, k) = ĝx(n, k)
∂tx(x; 0)
∂pi
+ ĝy(n, k)
∂ty(x; 0)
∂pi
where ĝx, ĝy denote a discrete approximation of the gradient components of the reference
image.
4- Calculate the first order approximation of the K × K Hessian matrix, whose element
(i, j) is given by:
H(i, j) = ∑
n,k
Ji(n, k)Jj(n, k)
5- Calculate a K × K updating matrix U, as explain in the text.
Iterations: while Niter > 0
6- Construct the warped low-resolution input image in accordance to the warping param-
eters estimated so far: ĥ(n, k) = h̃ℓ(round
(
t−1(xn,k; p)
)
).
7- Determine the overlapping area between ĥ and ĝ, as the set of pixel indices Ψ such that
any pixel position (n, k) ∈ Ψ is located inside the two images.
8- Calculate the error image e(n, k) = ĥ(n, k) − ĝ(n, k), for any (n, k) ∈ Ψ.
9- Calculate a smooth version ẽ of the error image by applying a 2 × 2 constant box filter,
and determine total error E = ∑(n,k)∈Ψ ∣ẽ(n, k)∣.
10- If E ≥ Emin then Niter = Niter − 1, otherwise update Emin = E, Niter = N0, and
pout = p.
11- Calculate the K × 1 vector q, with q(i) = ∑(n,k)∈Ψ ẽ(n, k)Ji(n, k).
12- Update the parameter vector p = p + Uq
The parameter update (i.e., line 12 in Algorithm 2) makes use of an updating matrix U calcu-
lated in step 5 of the algorithm. This matrix depends of the functional form of the geometrical
transformation assumed between the two images, t(x; p). For instance, in case of affine trans-](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-25-320.jpg)
![Recent Advances in Signal Processing
8
formation
t(x; p) =
[
(1 − p3)x + p4y + p1
p5x + (1 − p6)y + p2
]
, (3)
the parameter update matrix is
U = diag (D, D, 1, 1, 1, 1) H−1
, (4)
whereas in case of a projective transformation
t(x; p) =
[
(1 − p3)x + p4y + p1
p5x + (1 − p6)y + p2
]
/(p7x + p8y + 1), (5)
we have
U = diag (D, D, 1, 1, 1, 1, 1/D, 1/D) H−1
. (6)
In our implementation of multi-resolution image decomposition (2), we used a symmetric
filter w of size 3, whose taps are respectively w−1 = 1/4, w0 = 1/2, and w1 = 1/4. Also,
in order to reduce the storage space the first level of image decomposition (i.e., h̃1), is sub-
sampled by 2, such that any higher decomposition level is half the size of the original image.
3. Fusion of multiple images
The pixel brightness delivered by an imaging system is related to the exposure time through
a non-linear mapping called "radiometric response function", or "camera response function"
(CRF). There are a variety of techniques (e.g., Debevec & Malik (1997); Mitsunaga & Nayar
(1999)) that can be used for CRF estimation. In our work we assume that the CRF function of
the imaging system is known, and based on that we can write down the following relation for
the pixel brightness value:
I(x) = CRF (g(x)∆t) (7)
where x = [x y]T denotes the spatial position of an image pixel, I(x) is the brightness value
delivered by the system, g(x) denotes the irradiance level caused by the light incident on the
pixel x of the imaging sensor, and ∆t stands for the exposure time of the image.
Let Ik, for k ∈ {1, . . . , K} denote the K observed image frames whose exposure times are
denoted by ∆tk. A first step in our algorithm is to convert each image to the linear (irradiance)
domain based on knowledge about the CRF function, i.e.,
gk(x) = (1/∆tk) CRF−1
(Ik(x)) , for all k ∈ {1, . . . , K}. (8)
We assume the following model for the K observed irradiance images:
gk(x) = fk(x) + nk(x), (9)
where where x = [x y]T denotes the spatial position of an image pixel, gk is the k-th observed
image frame, nk denotes a zero mean additive noise, and fk denotes the latent image of the
scene at the moment the k-th input frame was captured. We emphasize the fact that the scene
may change between the moments when different input frames are captured. Such changes
could be caused by unwanted motion of the camera and/or by the motion of different objects
in the scene. Consequently, the algorithm can provide a number of K different estimates of
the latent scene image each of them corresponding to a different reference moment.](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-26-320.jpg)
![Digital Image Stabilization 9
In order to preserve the consistency of the scene, we select one of the input images as reference,
following to aim for improving the selected image based on the visual data available in all
captured images. In the following, we denote by gr, (r ∈ {1, . . . , K}) the reference image
observation, and hence the objective of the algorithm is to recover an estimate of the latent
scene image at moment r, i.e., f = fr.
The restoration process is carried out based on a spatiotemporal block processing. Assuming
a division of gr in non-overlapping blocks of size B × B pixels, the restored version of each
block is obtained as a weighted average of all blocks located in a specific search range, inside
all observed images.
Let XB
x denote the sub-set of spatial locations included into a block of B × B pixels centered in
the pixel x, i.e.:
XB
x =
{
y ∈ Ω ∣ [−B − B]T
< 2 (y − x) ≤ [B B]T
}
, (10)
where the inequalities are componentwise, and Ω stands for the image support. Also, let
g(XB
x ) denote the B2 × 1 column vector comprising the values of all pixels from an image g
that are located inside the block XB
x .
The restored image is calculated block by block as follows
ˆ
f (XB
x ) =
1
Z
K
∑
k=1
∑
y∈XS
x
wk (x, y) gk(XB
y ), for all XB
x , (11)
where Z = ∑K
k=1 ∑y∈XS
x
wk (x, y), is a normalization value, XS
x denotes the spatial search range
of size S × S centered in x, and wk (x, y) is a scalar weight value assigned to an input block XB
y
from image gk.
The weight values are emphasizing the input blocks that are more similar with the reference
block. Note that, at the limit, by considering only the most similar such block from each input
image we obtain the block corresponding to the optical flow between the reference image and
that input image, as in Tico & Vehviläinen (2007b). In such a case the weighted average (11)
comprises only a small number of contributing blocks for each reference block. If more com-
putational power is available, we can chose the weight values such that to use more blocks
for the restoration of each reference block, like for instance in the solution presented in Tico
(2008a), where the restoration of each reference block is carried out by considering all visu-
ally similar blocks found either inside the reference image or inside any other input image.
Although the use of block processing is more efficient for large images, it might create arti-
facts in detailed image areas. In order to cope with this aspect, the solution presented in Tico
(2008a), proposes a mechanism for adapting the block size to the local image content, by us-
ing smaller blocks in detail areas and larger blocks in smooth areas of the image. We conclude
this section by summarizing the operations of a multi-frame image stabilization solutions in
Algorithm 3.](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-27-320.jpg)

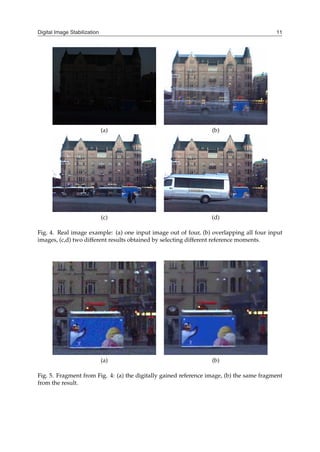



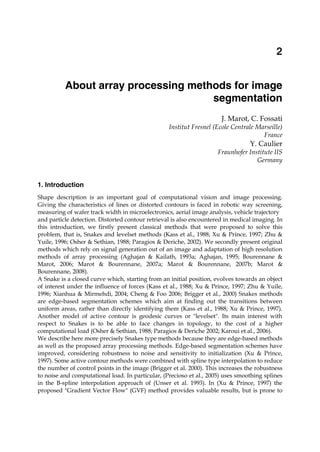



















![About array processing methods for image segmentation 35
10. References
Abed-Meraim, K. & Hua, Y. (1997). Multi-line fitting and straight edge detection using
polynomial phase signals, ASILOMAR31, Vol. 2, pp. 1720-1724, 1997.
Aghajan, H. K. & Kailath, T. (1992). A subspace Fitting Approach to Super Resolution Multi-
Line Fitting and Straight Edge Detection, Proc. of IEEE ICASSP, vol. 3, pp. 121-124,
1992.
Aghajan, H. K. & Kailath, T. (1993a). Sensor array processing techniques for super resolution
multi-line-fitting and straight edge detection, IEEE Trans. on IP, Vol. 2, No. 4, pp.
454-465, Oct. 1993.
Aghajan, H.K. & Kailath, T. (1993b). SLIDE: subspace-based line detection, IEEE int. conf.
ASSP, Vol. 5, pp. 89 - 92, April 27-30, 1993.
Aghajan, H. & Kailath, T. (1995). SLIDE: Subspace-based Line detection, IEEE Trans. on
PAMI, 16(11):1057-1073, Nov. 1994.
Aghajan, H.K. (1995). Subspace Techniques for Image Understanding and Computer Vision,
PhD Thesis, Stanford University, 1995
Bourennane, S. & Marot, J. (2005). Line parameters estimation by array processing methods,
IEEE ICASSP, Vol. 4, pp. 965-968, Philadelphie, Mar. 2005.
Bourennane, S. & Marot, J. (2006a). Estimation of straight line offsets by a high resolution
method, IEE proceedings - Vision, Image and Signal Processing, Vol. 153, issue 2, pp.
224-229, 6 April 2006.
Bourennane, S. & Marot, J. (2006b). Optimization and interpolation for distorted contour
estimation, IEEE-ICASSP, vol. 2, pp. 717-720, Toulouse, France, April 2006.
Bourennane, S. & Marot, J. (2006c). Contour estimation by array processing methods,
Applied signal processing, article ID 95634, 15 pages, 2006.
Bourennane, S.; Fossati, C. & Marot, J., (2008). About noneigenvector source localization
methods EURASIP Journal on Advances in Signal Processing Vol. 2008, Article ID
480835, 13 pages doi:10.1155/2008/480835
Brigger, P. ; Hoeg, J. & Unser, M. (2000). B-Spline Snakes: A Flexible Tool for Parametric
Contour Detection, IEEE Trans. on IP, vol. 9, No. 9, pp. 1484-96, 2000.
Cheng, J. & Foo, S. W. (2006). Dynamic directional gradient vector flow for snakes, IEEE
Trans. on Image Processing, vol. 15, no. 6, pp.1563-1571, June 2006.
Connell, S. D. & Jain, A. K. (2001). Template-based online character recognition, Pattern
Rec., vol. 34, no 1, pp: 1-14, 2001.
Gander, W.; Golub, G.H. & Strebel, R. (1994). Least-squares fitting of circles and ellipses ,
BIT, n. 34, pp. 558-578, 1994.
Halder, B. ; Aghajan, H. & T. Kailath (1995). Propagation diversity enhancement to the
subspace-based line detection algorithm, Proc. SPIE Nonlinear Image Processing VI
Vol. 2424, p. 320-328, pp. 320-328, March 1995.
Jones, D.R. ; Pertunen, C.D. & Stuckman, B.E. (1993). Lipschitzian optimization without the
Lipschitz constant, Journal of Optimization and Applications, vol. 79, no. 157-181, 1993.
Karoui, I.; Fablet, R.; Boucher, J.-M. & Augustin, J.-M. (2006). Region-based segmentation
using texture statistics and level-set methods, IEEE ICASSP, pp. 693-696, 2006.
Kass, M.; Witkin, A. & Terzopoulos, D. (1998). Snakes: Active Contour Model, Int. J. of
Comp. Vis., pp.321-331, 1988
Kiryati, N. & Bruckstein, A.M. (1992). What's in a set of points? [straight line fitting], IEEE
Trans. on PAMI, Vol. 14, No. 4, pp.496-500, April 1992.](https://image.slidesharecdn.com/1132368-250521160742-103f5a0c/85/Recent-Advances-In-Signal-Processing-Ashraf-A-Zaher-53-320.jpg)