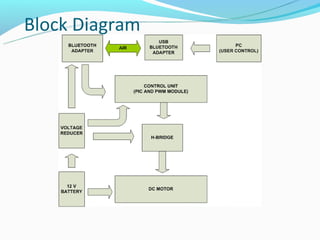
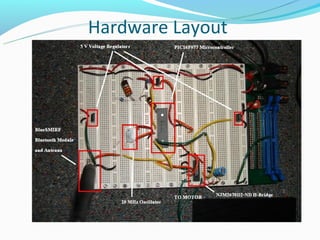
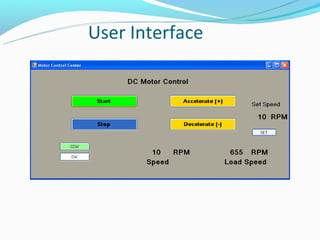
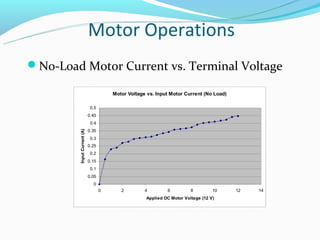
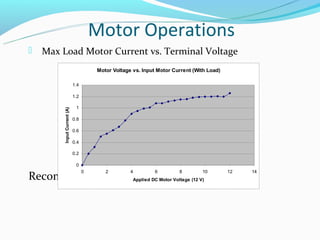
This document describes a wireless Bluetooth controller for controlling the speed of a DC motor. It uses Bluetooth wireless technology to send speed control signals from a user interface to a microcontroller, which then translates the desired speed to a duty cycle to control an H-bridge and drive the motor. The system was able to control the motor bidirectionally between 0-95 RPM and test results showed it could accurately control speed and achieve a maximum continuous load of 15W and torque of 1.33 N-m. Potential applications include robotics, remote control vehicles, and industrial and household uses.






































!["GPS" Global Positioning System [PDF]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystemgpsmainpdf-101105164539-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




























