Downloaded 10 times

![3
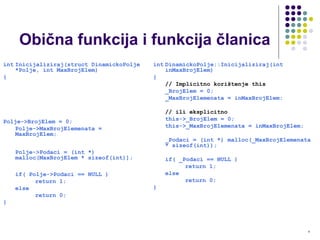
Primjer funkcije članice
int main(int argc, char* argv[])
{
StrukturaC objC;
Funkcija (&objC);
StrukturaCPP objCPP;
objCPP.Funkcija();
return 0;
}
struct StrukturaC {
int NekiPodatak;
};
void Funkcija(StrukturaC *s){};
struct StrukturaCPP {
int NekiPodatak;
void Funkcija() {}
};](https://image.slidesharecdn.com/predavanja04-160316081824/85/Predavanja-04-3-320.jpg)
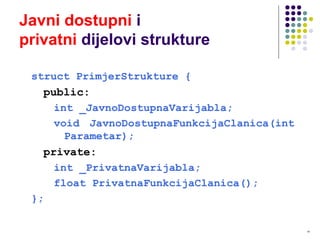

Dokument opisuje kako se u C++-u funkcije članice koriste za rad sa strukturama, objašnjavajući sintaksu i prednosti ovog pristupa. Također se raspravlja o razlici između klasa i struktura te o pristupnim pravima unutar struktura koristeći ključeve 'public' i 'private'. Na kraju se ističe važnost operatora dosega za definiranje članova klasa izvan deklaracije.














![[TVZ Računarstvo] Dinamičke web aplikacije, predavanje 7.](https://cdn.slidesharecdn.com/ss_thumbnails/7phpijavascriptoo-170514144038-thumbnail.jpg?width=640&height=640&fit=bounds)




















