The document provides a comprehensive overview of implicit analyses using LS-DYNA, including setup, convergence improvement strategies, and troubleshooting techniques. It covers various types of analyses, solution methods, and considerations for both nonlinear and linear models. The material also emphasizes the importance of proper model setup, contact definitions, and advanced solver technologies to ensure successful simulations.
![Frequency domain analysis
■ Frequency response function - FRF
*FREQUENCY_DOMAIN_FRF
Transfer functions for “unity” excitation
■ Steady state dynamics - SSD
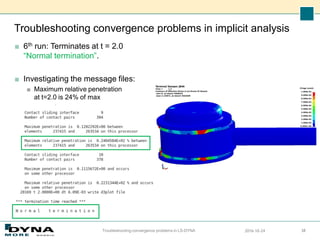
*FREQUENCY_DOMAIN_SSD[_FATIGUE][_ERP]
Extension of FRF for frequency dependent excitation and binary plot, d3ssd.
Harmonic loading.
*MAT_ADD_FATIGUE Freq = 25 Hz](https://image.slidesharecdn.com/implicitanalysesinls-dyna2-240829114754-33325191/85/Overview-how-to-set-up-implicit-analysis-and-improve-convergence-9-320.jpg)
![Frequency domain analysis
■ Random vibration
*FREQUENCY_DOMAIN_RANDOM_VIBRATION[_FATIGUE]
Uncertain loading, wind, wave, vibration …
Power Spectral Density, PSD, loading
Statistical response, 1 sigma.
Several methods for random
vibration fatigue available.
■ Response spectrum
*FREQUENCY_DOMAIN_RESPONSE_SPECTRUM
Maximum peak response analysis of structures.
Civil engineering, naval structures, etc.
Several mode combination methods, SRSS, NRL, CQC, …
Acceleration
PSD
(g^2/Hz)](https://image.slidesharecdn.com/implicitanalysesinls-dyna2-240829114754-33325191/85/Overview-how-to-set-up-implicit-analysis-and-improve-convergence-10-320.jpg)
![Frequency domain analysis
■ Acoustics
*MAT_ACOUSTIC
■ *FREQUENCY_DOMAIN_ACOUSTIC_BEM[_OPTION]
_ATV
_MATV
_HALF_SPACE
_PANEL_CONTRIBUTION
■ *FREQUENCY_DOMAIN_ACOUSTIC_FEM
■ *FREQUENCY_DOMAIN_SEA[_OPTION]
_SUBSYSTEM
_CONNECTION
_INPUT_POWER](https://image.slidesharecdn.com/implicitanalysesinls-dyna2-240829114754-33325191/85/Overview-how-to-set-up-implicit-analysis-and-improve-convergence-11-320.jpg)
![Implicit keywords
LS-DYNA Implicit, DYNAmore Nordic 13
■ *CONTROL_IMPLICIT_GENERAL (required for implicit)
■ activates implicit mode, explicit-implicit switching
■ defines implicit time step size
■ geometric stiffness activation
■ *CONTROL_IMPLICIT_SOLVER (optional)
■ parameters for and choice of linear equation solver,
which inverts stiffness matrix: [K]{x}={f}
■ controls extra output for debugging
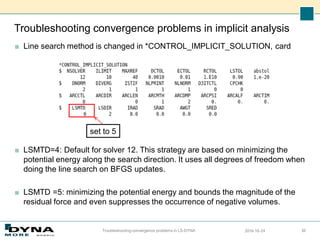
■ *CONTROL_IMPLICIT_SOLUTION (optional)
■ parameters for nonlinear equation solver (Newton-based methods)
■ controls iterative equilibrium search
■ convergence tolerances
■ “linear" solution is selected here
■ controls extra output for debugging](https://image.slidesharecdn.com/implicitanalysesinls-dyna2-240829114754-33325191/85/Overview-how-to-set-up-implicit-analysis-and-improve-convergence-13-320.jpg)