MÀQUINES ELÈCTRIQUES
Genereren o transformen la energia elèctrica
en una altre tipus d’energia o/i viceversa, o
bé, en energia elèctrica amb altres
característiques.
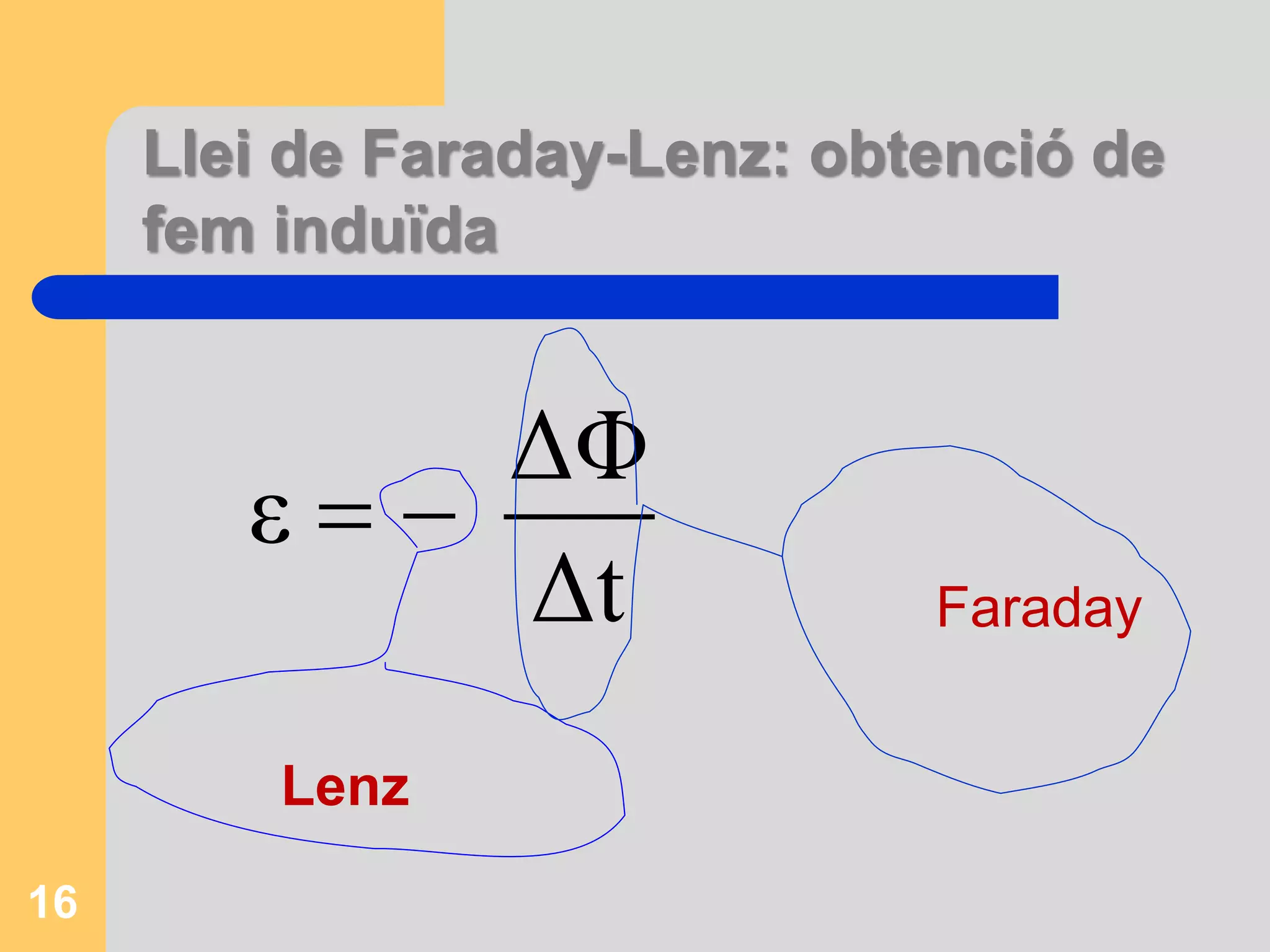
Són el resultat de l’aplicació dels principis
electromagnètics (Llei de Faraday, Lenz…)
Tenen un circuit magnètic i circuits elèctrics.
3.
CLASSIFICACIÓ
Transformadors:conserven la forma d’energia
però canvien les seves característiques.
Transformen el voltatge o la intensitat del ca.
Motors: energia elèctrica energia mecànica.
Motors de cc. (imant permanent, Sèrie,
Derivació, Compound)
Motores de ca. (Monofàsics, trifàsics)
(Síncrons i asíncrons)
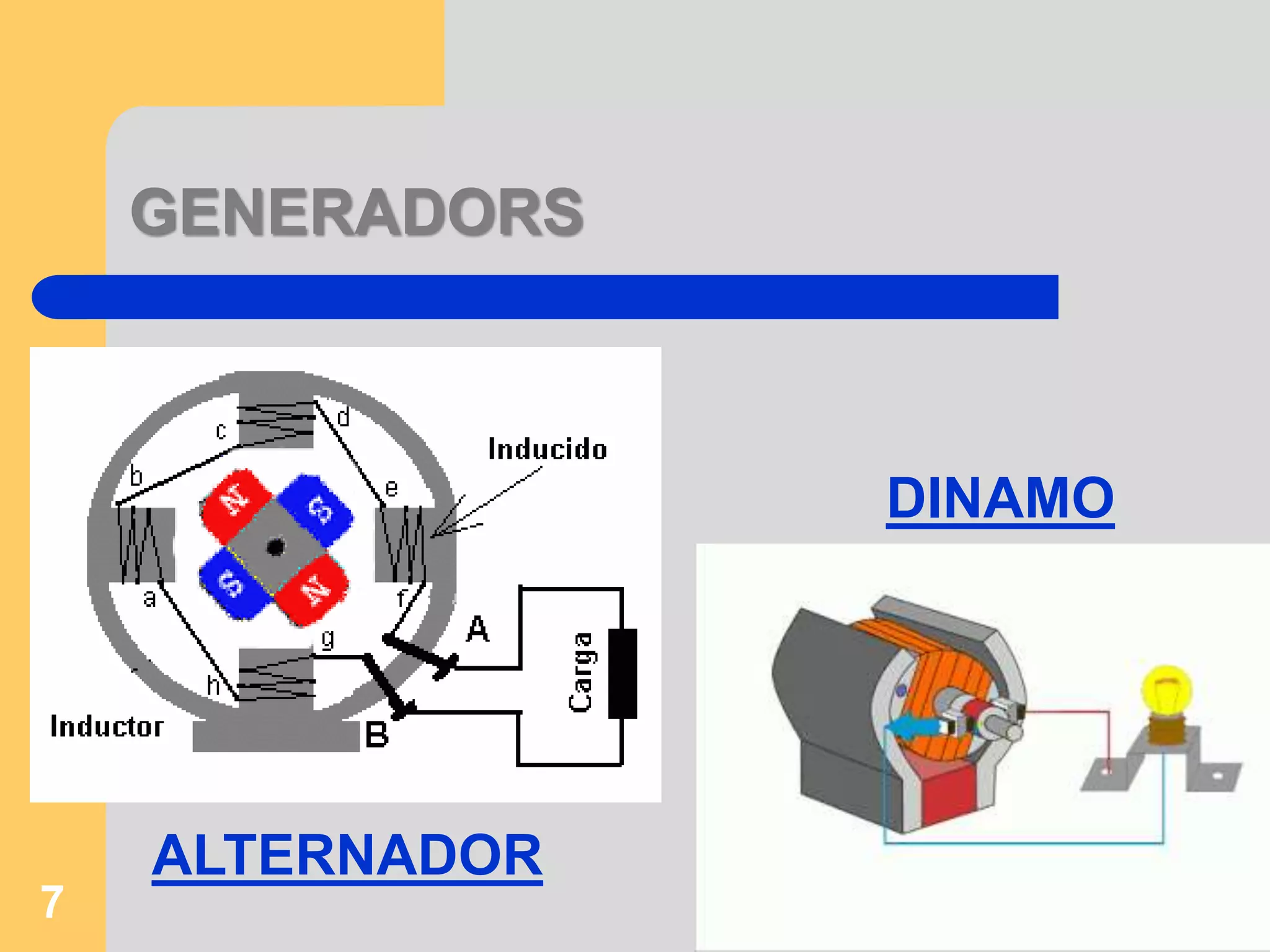
Generadors: energia mecànica e. elèctrica
Generadors cc o dinamos.
Generadors ca. (alternadors)
4.
CLASSIFICACIÓ
Des d’unavisió mecànica, las màquines
elèctriques es classifiquen en:
Rotatives: Generadors i Motors
Estàtiques: Transformadors
5.
TRANSFORMADORS
Sónmàquines elèctriques estàtiques que
augmenten o disminueixen el voltatge d’un circuit
sense pèrdua aparent de potència.
Aplicació: transport i utilització d’e elèctrica, forma
part de les fonts d’alimentació d’electrodomèstics.
El seu funcionament es basa en el principi
d’inducció electromagnètic i consten de dues
bobines (primària i secundària) debanades sobre
un nucli de ferro.
Hi han monofàsics i trifàsics.
Classificació dels motors
Segons la font de tensió d’alimentació del motor, es
poden classificar els motors en:
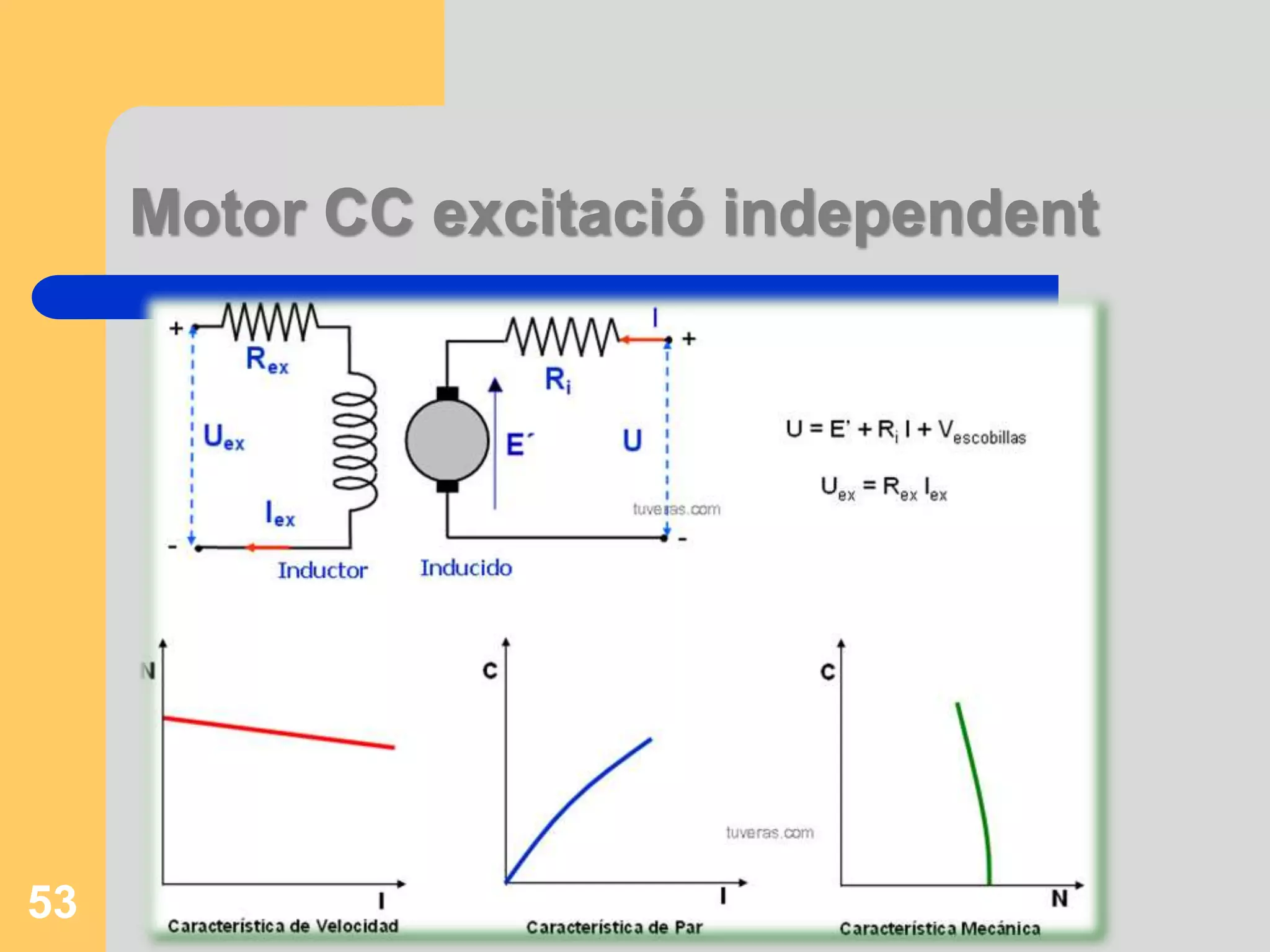
– Motors de corrent continu (CC): induït i
inductor CC
– Motors de corrent altern (CA):
Síncrones: induït CA i inductor CC
D’inducció: induït i inductor CA
11
12.
Flux magnètic ():
– És el nombre de línies de força que té un camp magnètic.
B: densitat o inducció magnètica (T)
: flux magnètic (Wb)
S: superficie (m2)
•Unitat: En el Sistema Internacional,
Weber (Wb). 1 Wb = 1 T·m2
13.
Inducció o densitatde flux magnètic
(B):
– És la quantitat de línies de força del camp
magnètic que travessen perpendicularment
la unitat de superfície.
B= /S
– Unitat: Tesla (T) 1 T=1 Wb/1m2
14.
14
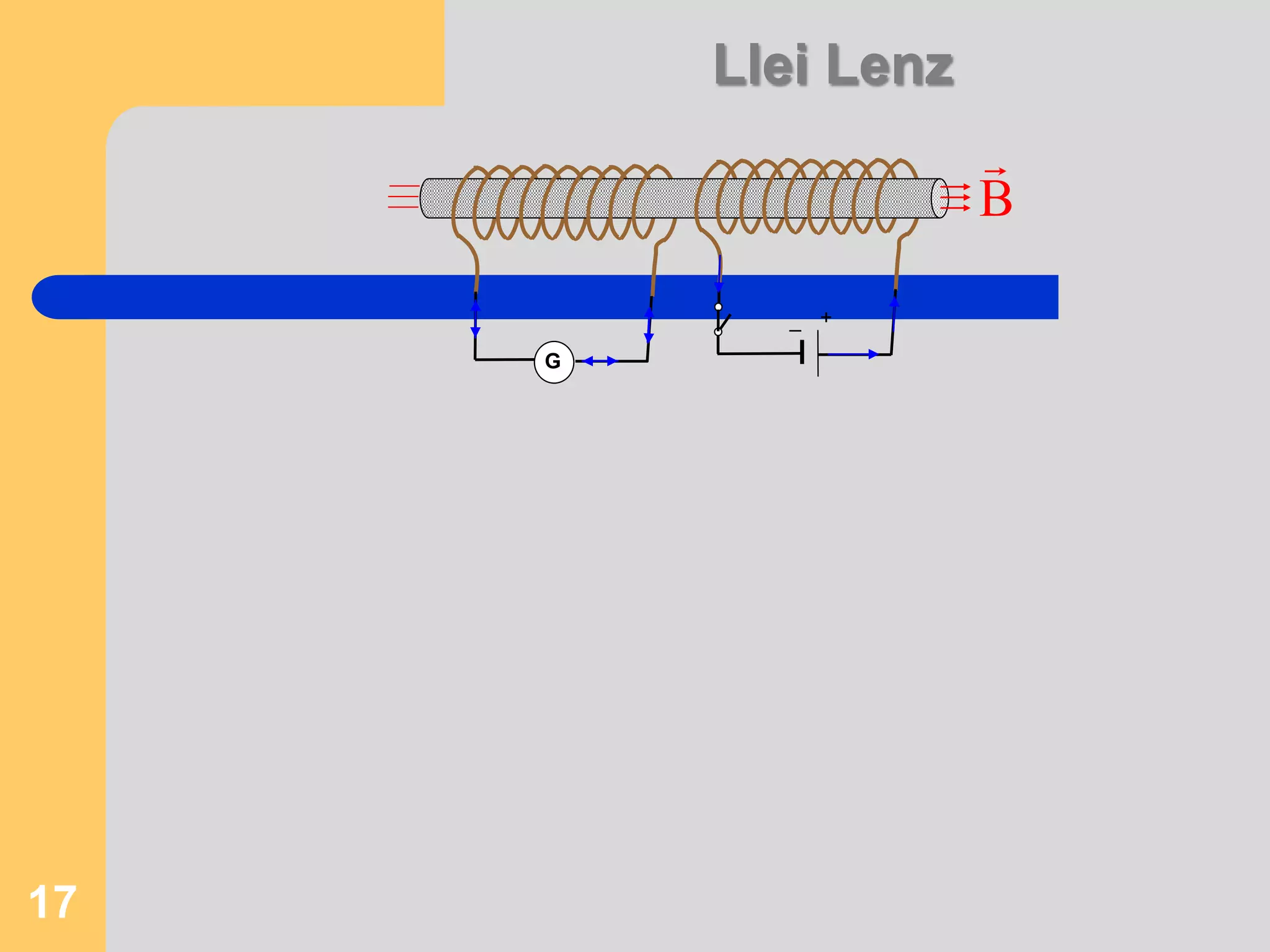
Experiències deFaraday
G
N S
Generació de la força electromotriu induïda
(Fem)
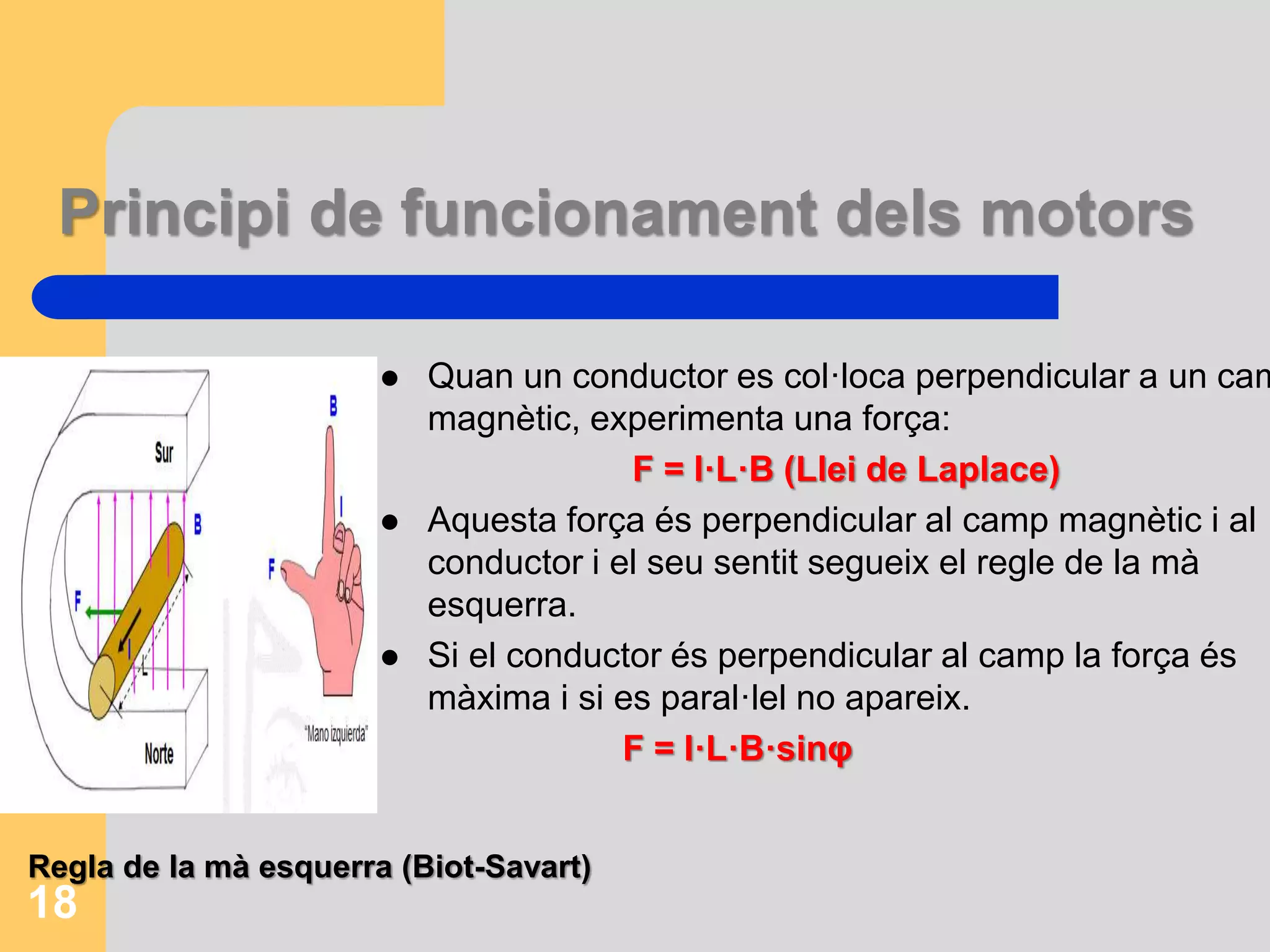
Principi de funcionamentdels motors
Quan un conductor es col·loca perpendicular a un camp
magnètic, experimenta una força:
F = I·L·B (Llei de Laplace)
Aquesta força és perpendicular al camp magnètic i al
conductor i el seu sentit segueix el regle de la mà
esquerra.
Si el conductor és perpendicular al camp la força és
màxima i si es paral·lel no apareix.
F = I·L·B·sinφ
Regla de la mà esquerra (Biot-Savart)
18
19.
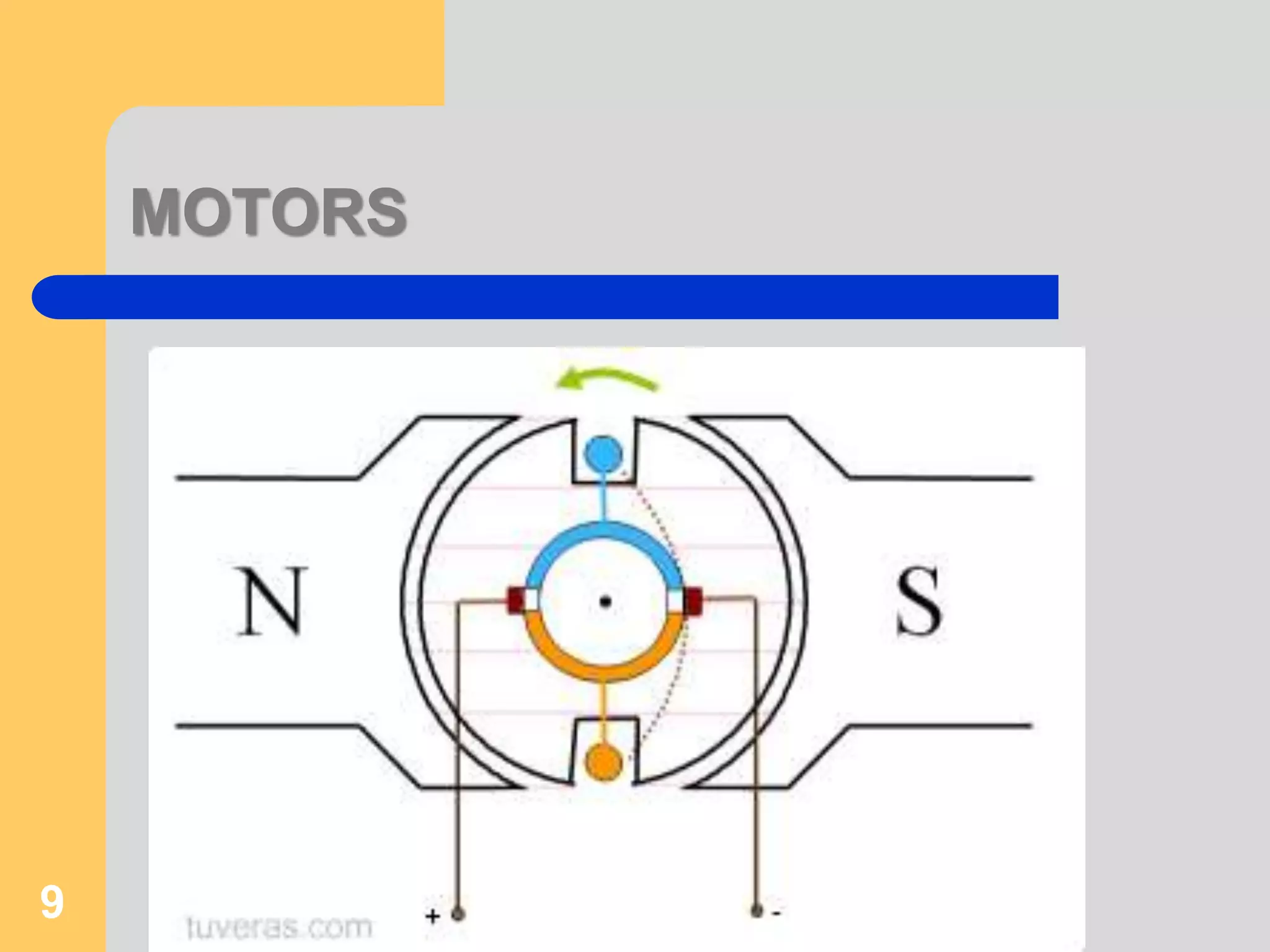
Principi de funcionamentdels motors
Si es col · loca una espira en un
camp magnètic i es fa passar una
intensitat de corrent a través d'ella,
el camp exerceix una força sobre
els costats de l'espira, i aquestes
forces exerceixen un moment de
forces. L'espira començarà a rotar,
per la qual cosa s'haurà
transformat energia elèctrica en
energia mecànica.
19
20.
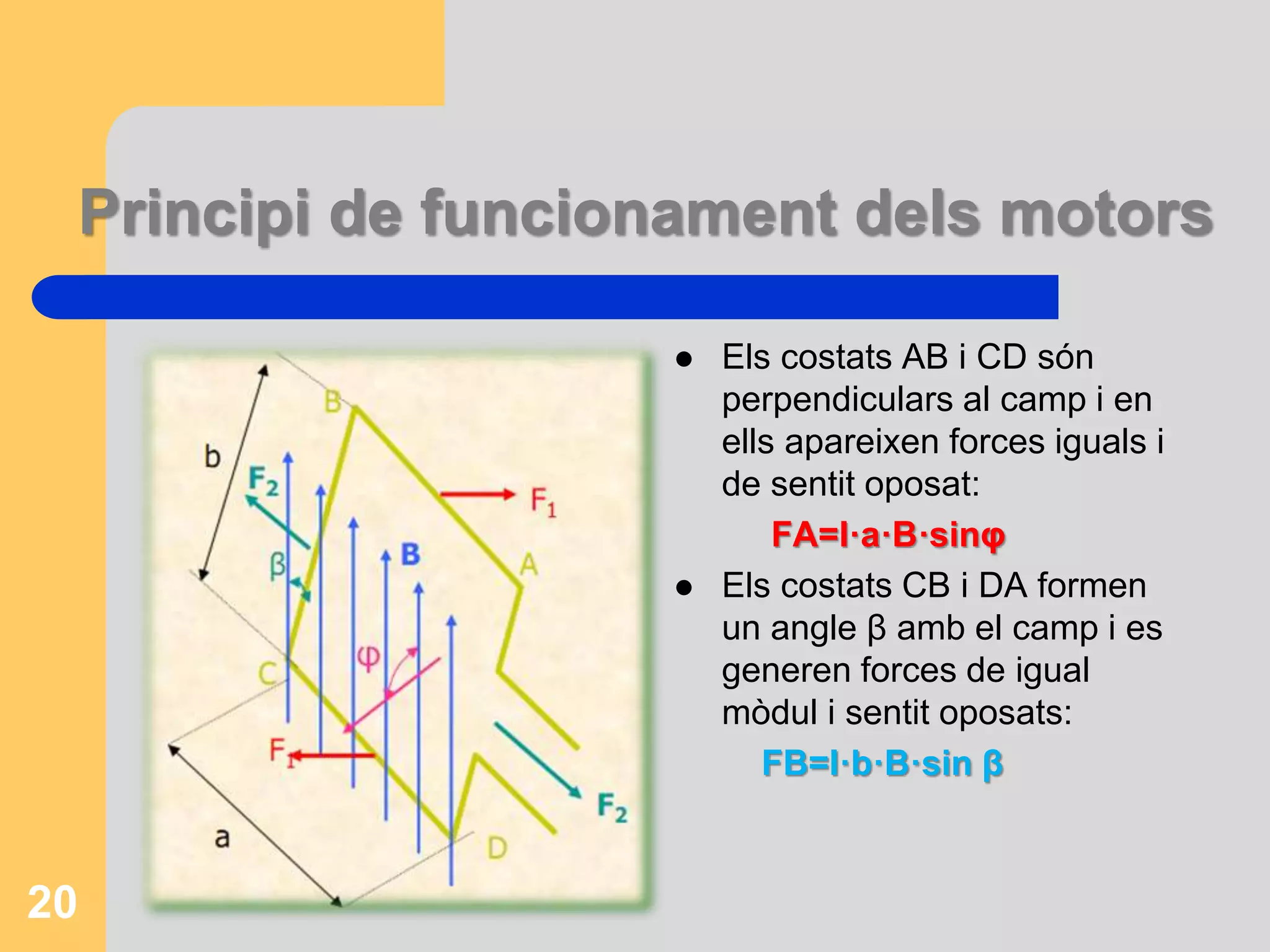
Principi de funcionamentdels motors
Els costats AB i CD són
perpendiculars al camp i en
ells apareixen forces iguals i
de sentit oposat:
FA=I·a·B·sinφ
Els costats CB i DA formen
un angle β amb el camp i es
generen forces de igual
mòdul i sentit oposats:
FB=I·b·B·sin β
20
21.
Principi de funcionamentdels motors
El par de F1 originen un
moment o par:
M=F·r·sinφ =
F1·b/2+F1·b/2=I·a·b·B·sinφ=I·S
·B·sin φ
El moment fa que l’espira
giri fins situar-se
perpendicularment al camp.
El valor màxim del moment
s’obté per φ igual a 90º.
21
22.
Força contraelectromotriu (fcem)
En els motors quan el rotor comença a girar
es genera una nova força electromotriu
ïnduida que s’oposa a la força electromotriu
que s’aporta per generar les forces que
provoquen el par de gir.
La fcem té sentit contrari a la fem degut a la
llei de Lenz.
22
23.
Constitució general delsmotors
Mecànicament: Rotor
Estator
Circuit magnètic: Nuclis i entreferro
Circuit elèctric: Inductor (produeix el camp
magnètic)
Induït (s’indueix una fcem i
23 produeix un parell)
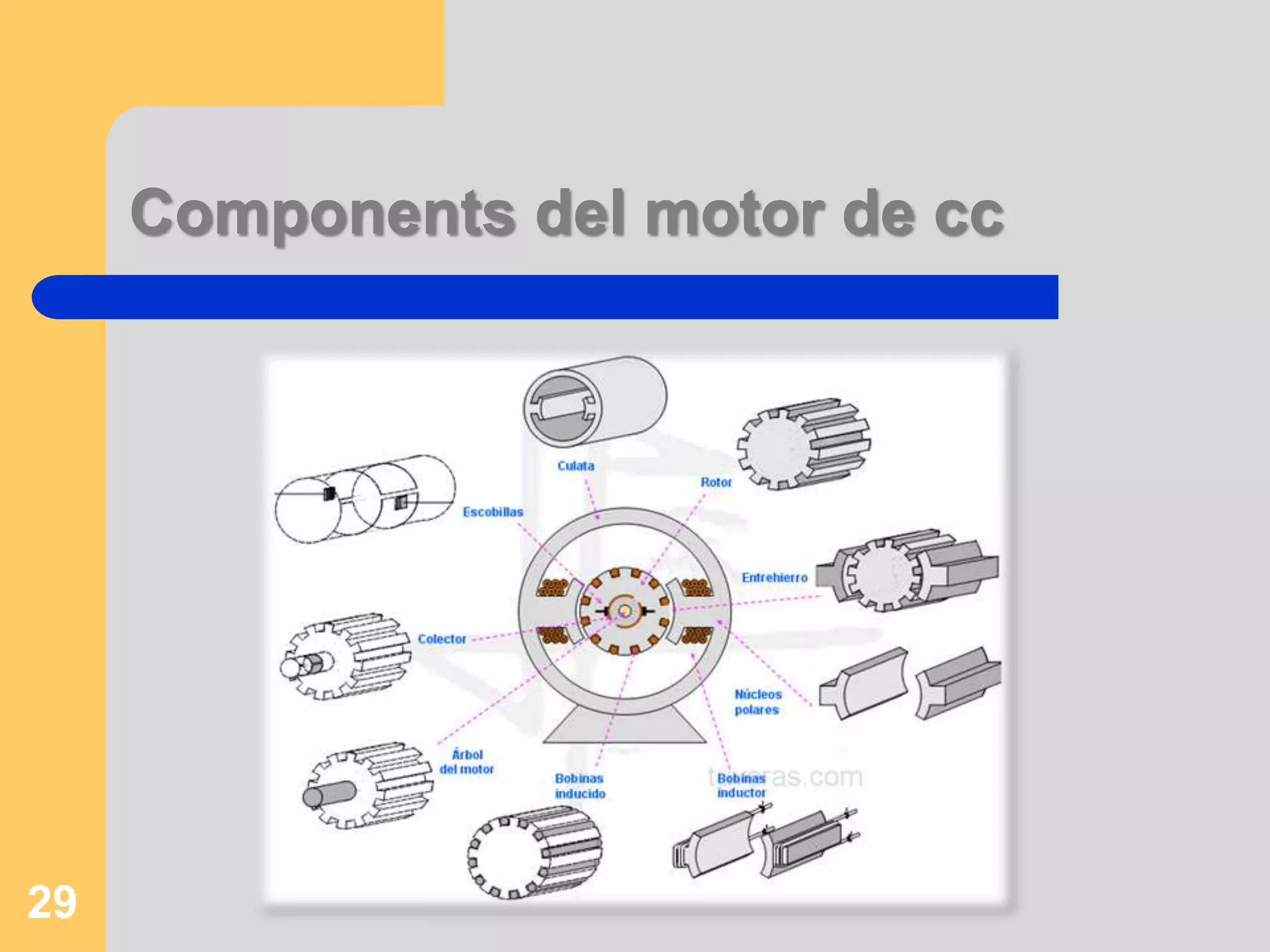
24.
Constitució
Inductor: Ésla part fixa
del motor i és a on es
crea el camp
magnètic. Pot ser creat
per una bobina o per
un imant permanent.
Induït: és a on es crea el
par de forces i per tant
la part giratòria o rotor.
En el es troben:
Col·lector de delges
24 Bobines del rotor.
25.
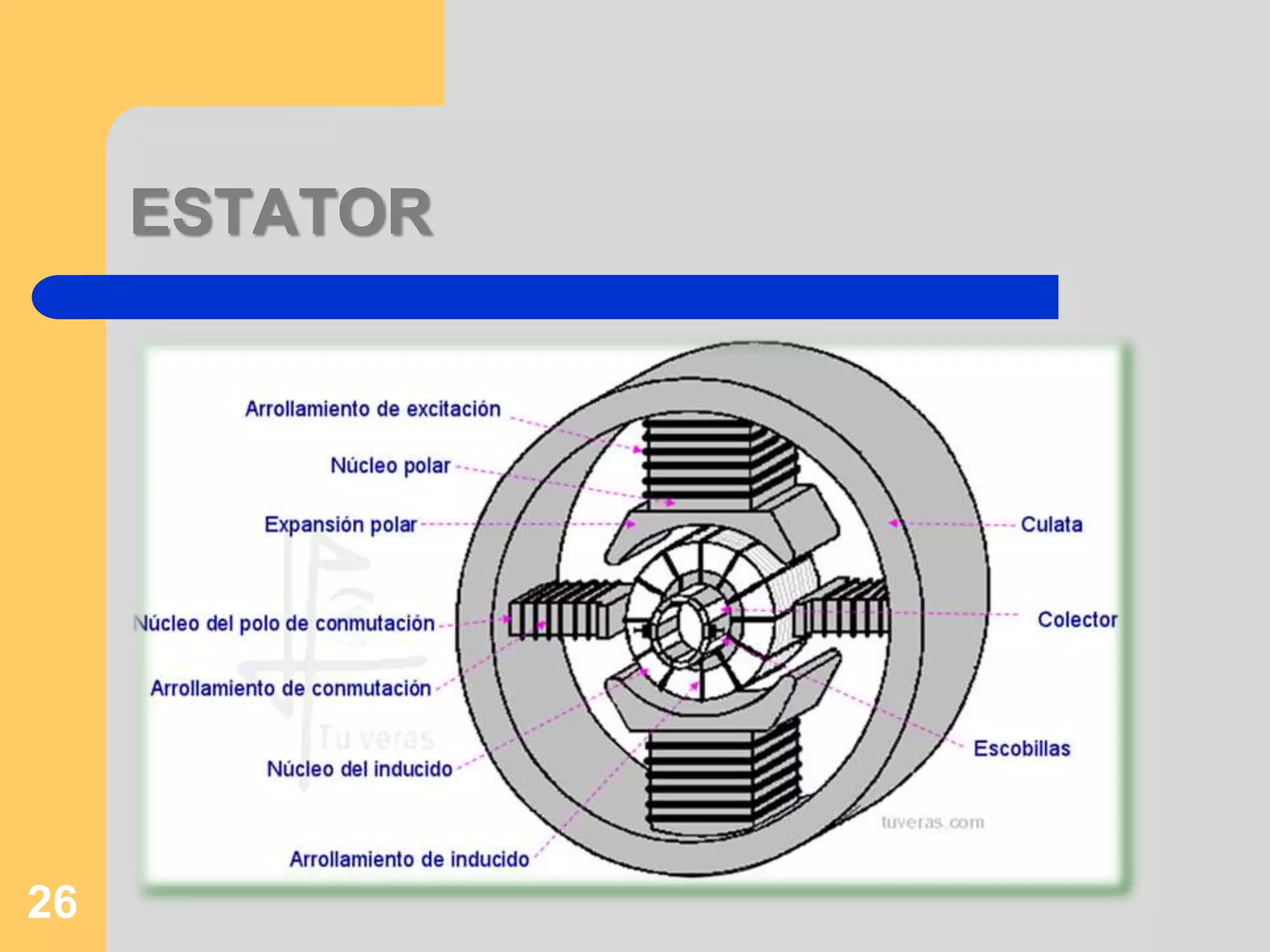
Estructura de l’estator
Carcassa o culata: condueix el flux magnètic
cap l’interior.
Pols sortints: cargolats a la carcassa, poden
ser d’una peça o laminats. Nucli polar +
expansió polar.
Pols auxiliars de commutació: són més petits
i tenen alvoltant bobines que es connecten en
sèrie amb les bobines de l’induït.
Bobines inductores: s’enrotllen alvoltant dels
pols, són alimentades amb CC i creen el camp
25 magnètic inductor
Estructura del rotor
Nucli o armadura: cilindre format per làmines metàl·liques
i aillades. Superficialment els discos es tallen ranures a
s’enrotllen les bobines.
Bobines de l’induït i entreferro
Col·lector de delgues o commutador: permet connectar
l’induït amb l’exterior. Format per làmines de coure
muntades sobre l’eix i separades amb material aillant. Gira
a la mateixa velocitat que l’eix. Cada delga està connectada
a les bobines de l’induït. Sistema de commutació.
Escombretes: muntades sobre el portaescombretes són
27 peces de carbó per a on entra i surt el corrent elèctric.
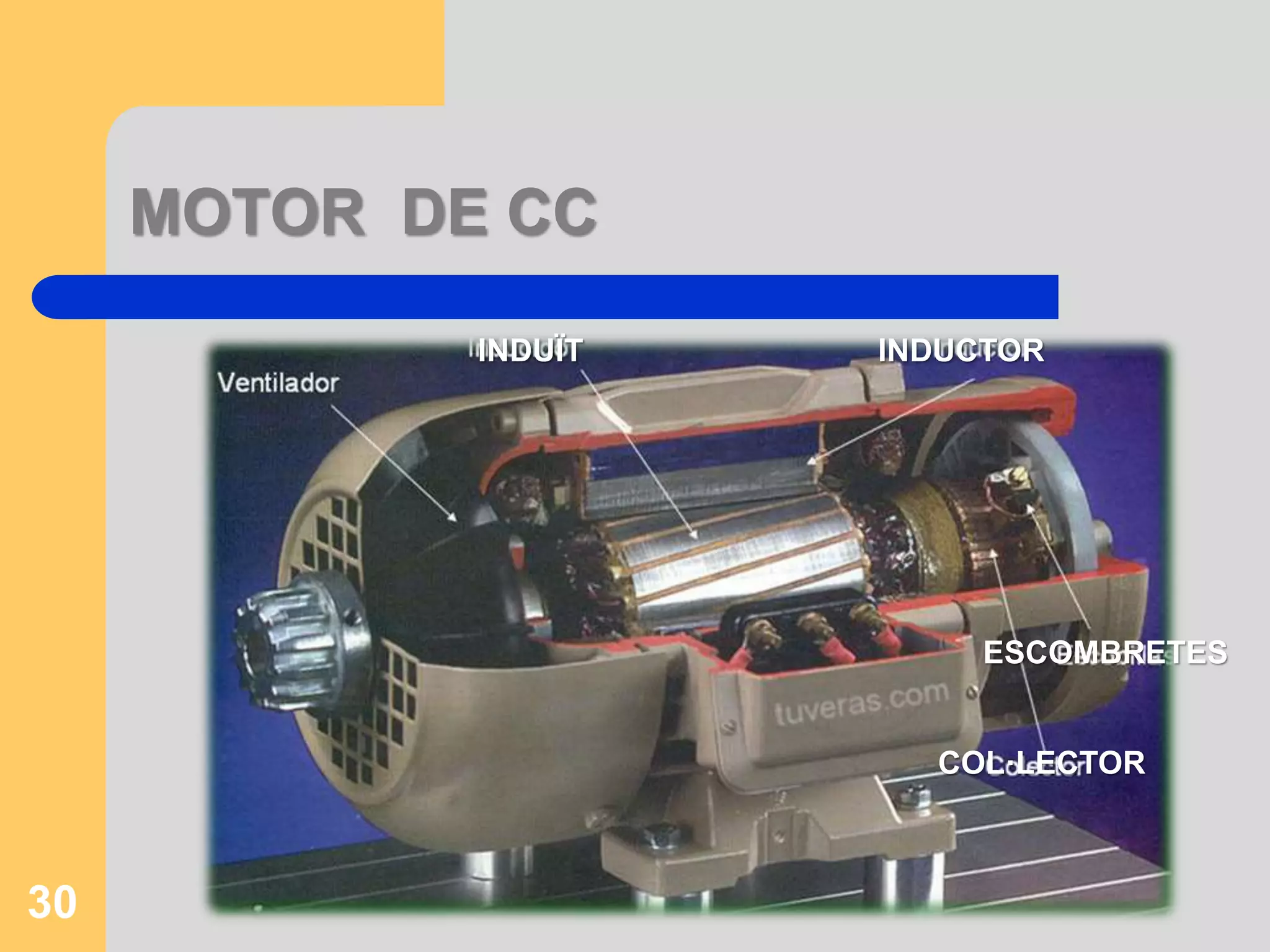
MOTOR DE CC
INDUÏT
INDUCTOR
ESCOMBRETES
COL·LECTOR
30
31.
Funcionament del motorde cc
Es basa en passar un CC perquè es generi un camp
alvoltant de l’espira. Si l’espira s’introdueix entre els pols
d’un imant, es crearan forces d’atracció i repulsió entre els
dos camps magnètics. Perquè l’ espira giri constantment
s’introdueix un anell o col·lector,dividid en dues meitats
sobre les que es fregen dues escombretes (per on
s’intrudeix el corrent). De forma que cada vegada que la
espira dóna mitja volta, canvia el signe del corrent que
circularà per ella canviant els pols del camp magnètic
generat per ella i obligant-la a reorientar-se dintre del
camp magnètic creat per l’imant.
31
32.
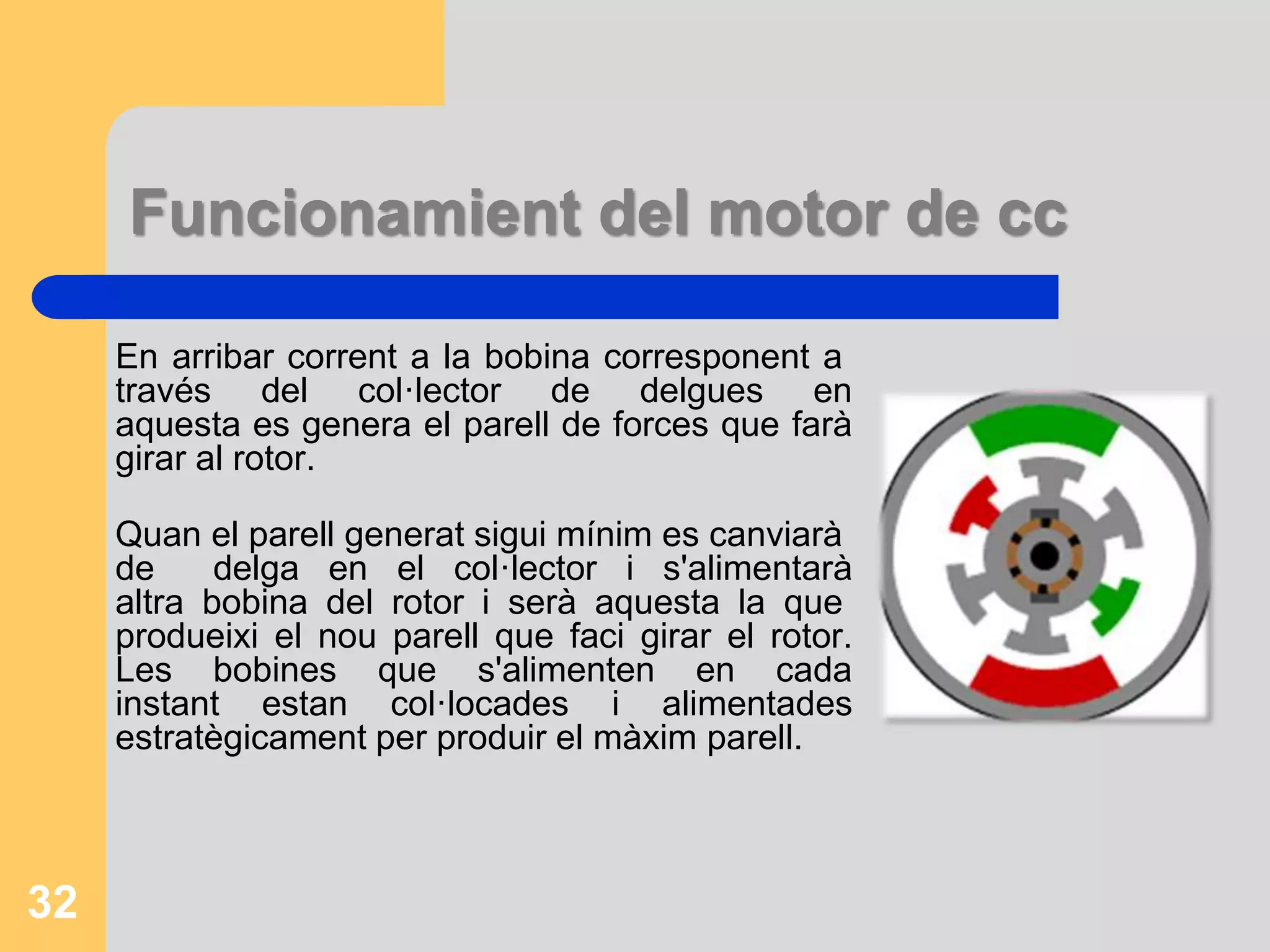
Funcionamient del motorde cc
En arribar corrent a la bobina corresponent a
través del col·lector de delgues en
aquesta es genera el parell de forces que farà
girar al rotor.
Quan el parell generat sigui mínim es canviarà
de delga en el col·lector i s'alimentarà
altra bobina del rotor i serà aquesta la que
produeixi el nou parell que faci girar el rotor.
Les bobines que s'alimenten en cada
instant estan col·locades i alimentades
estratègicament per produir el màxim parell.
32
33.
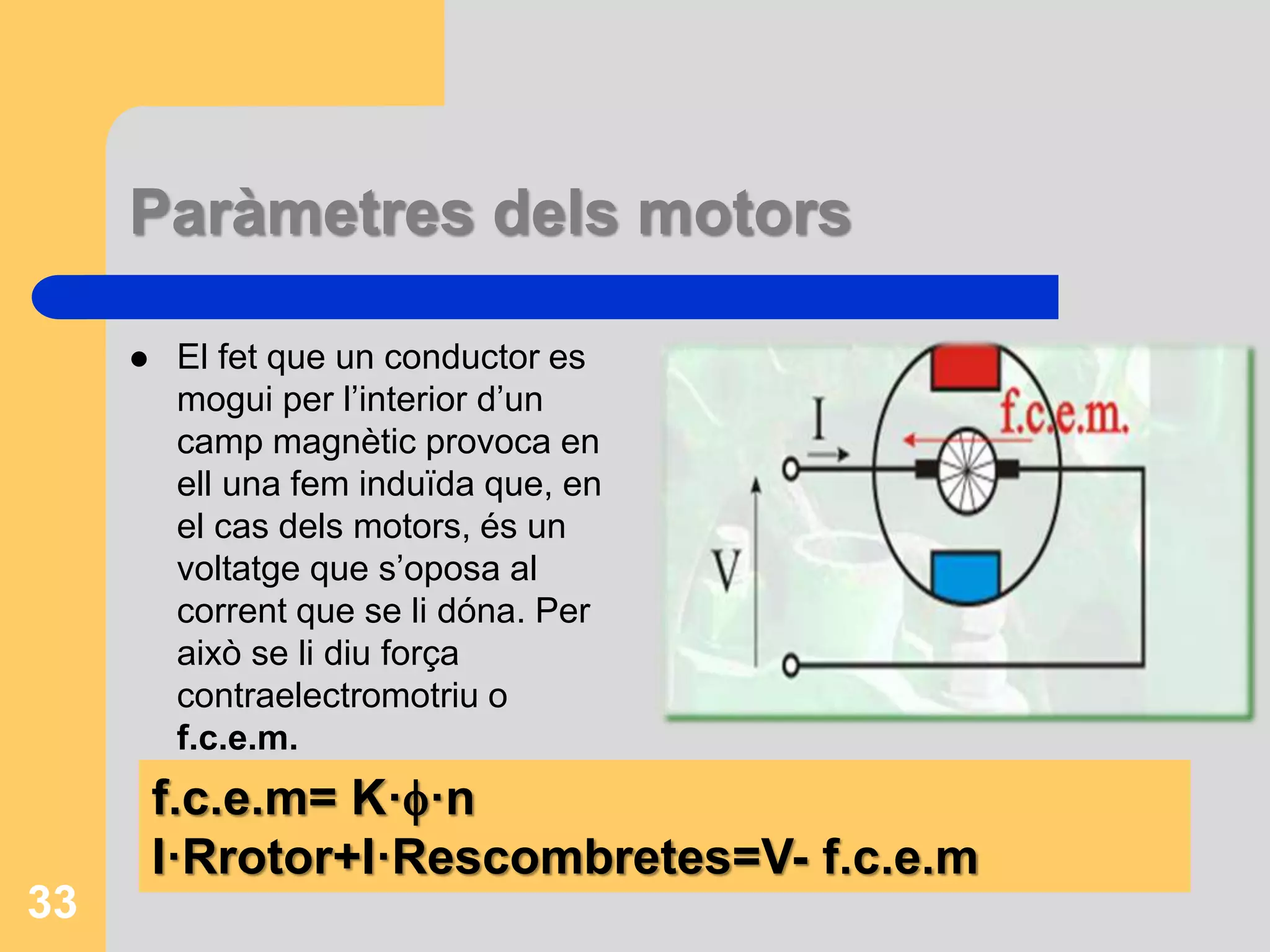
Paràmetres dels motors
El fet que un conductor es
mogui per l’interior d’un
camp magnètic provoca en
ell una fem induïda que, en
el cas dels motors, és un
voltatge que s’oposa al
corrent que se li dóna. Per
això se li diu força
contraelectromotriu o
f.c.e.m.
33
f.c.e.m= K··n
I·Rrotor+I·Rescombretes=V- f.c.e.m
34.
Magnituts fonamentals delsmotors
de cc
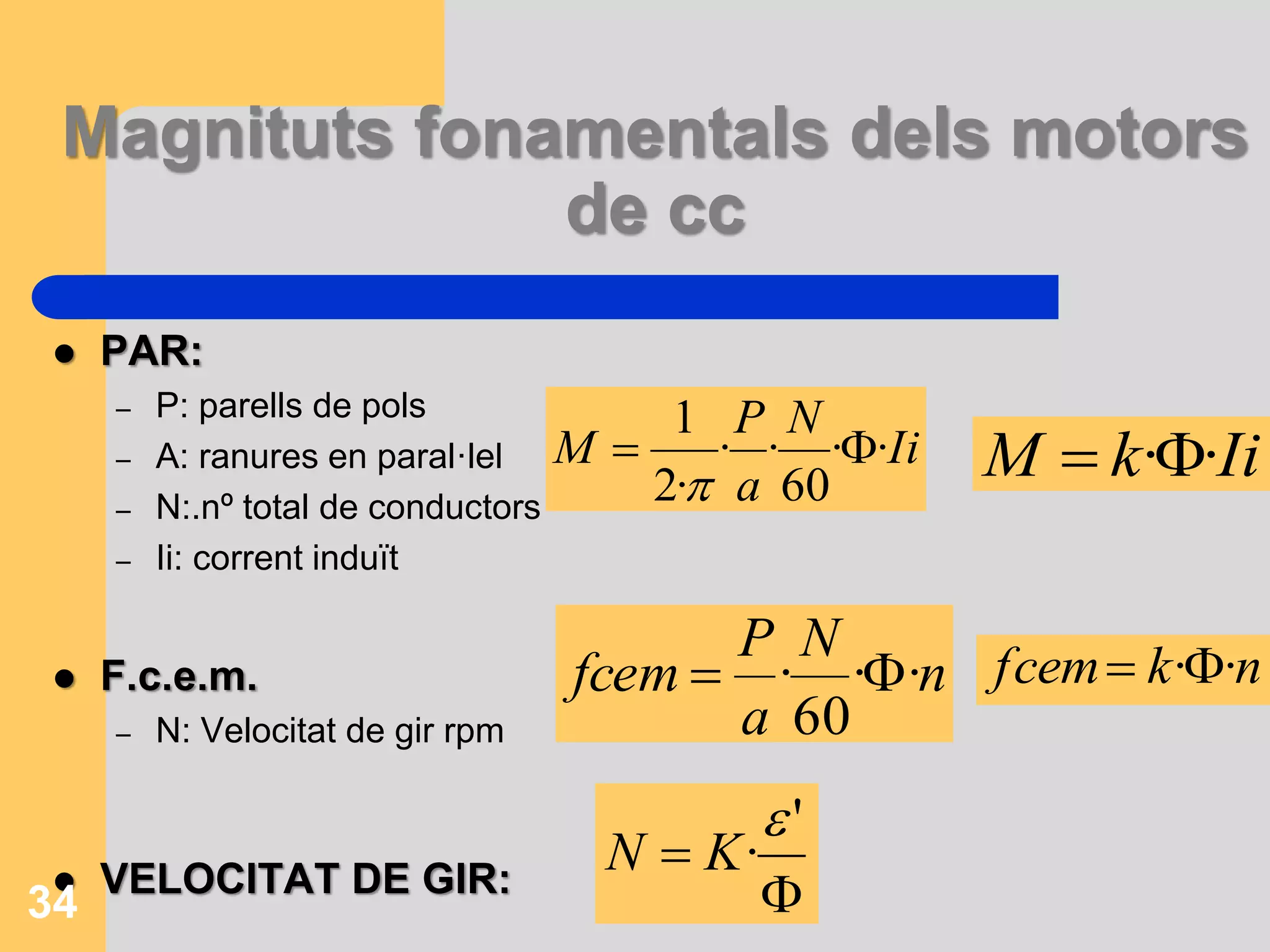
PAR:
– P: parells de pols
– A: ranures en paral·lel
– N:.nº total de conductors
– Ii: corrent induït
F.c.e.m.
– N: Velocitat de gir rpm
VELOCITAT DE GIR:
P
1
M · ·
·
·
M k··Ii
fcem · ·
n
N
P
·
a
60
'
·
N K
34
Ii
N
a
60
2·
fcem k··n
35.
Magnituts fonamentals delsmotors
de cc
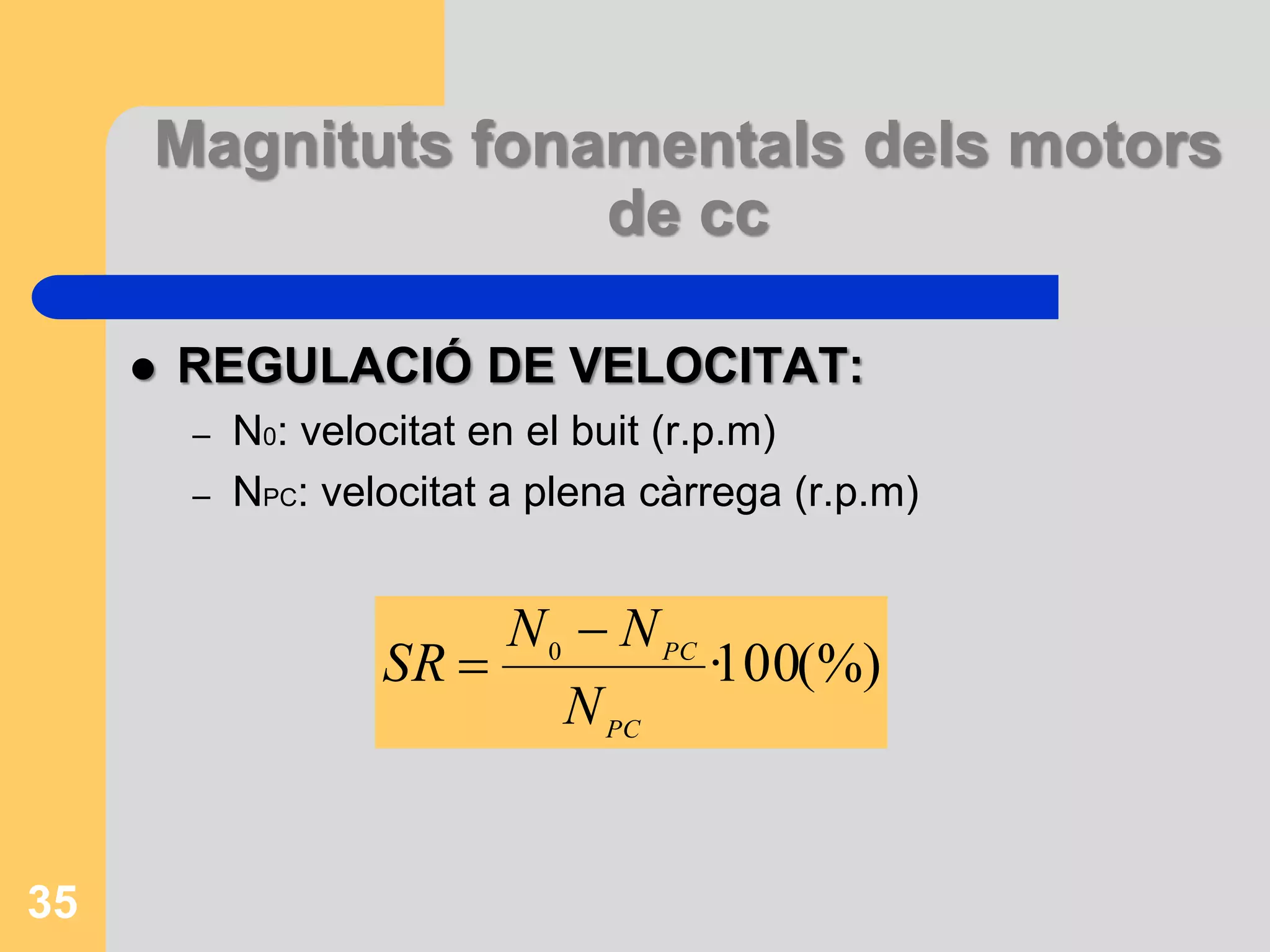
REGULACIÓ DE VELOCITAT:
– N0: velocitat en el buit (r.p.m)
– NPC: velocitat a plena càrrega (r.p.m)
N N
·100(%) 0
PC
PC
N
SR
35
36.
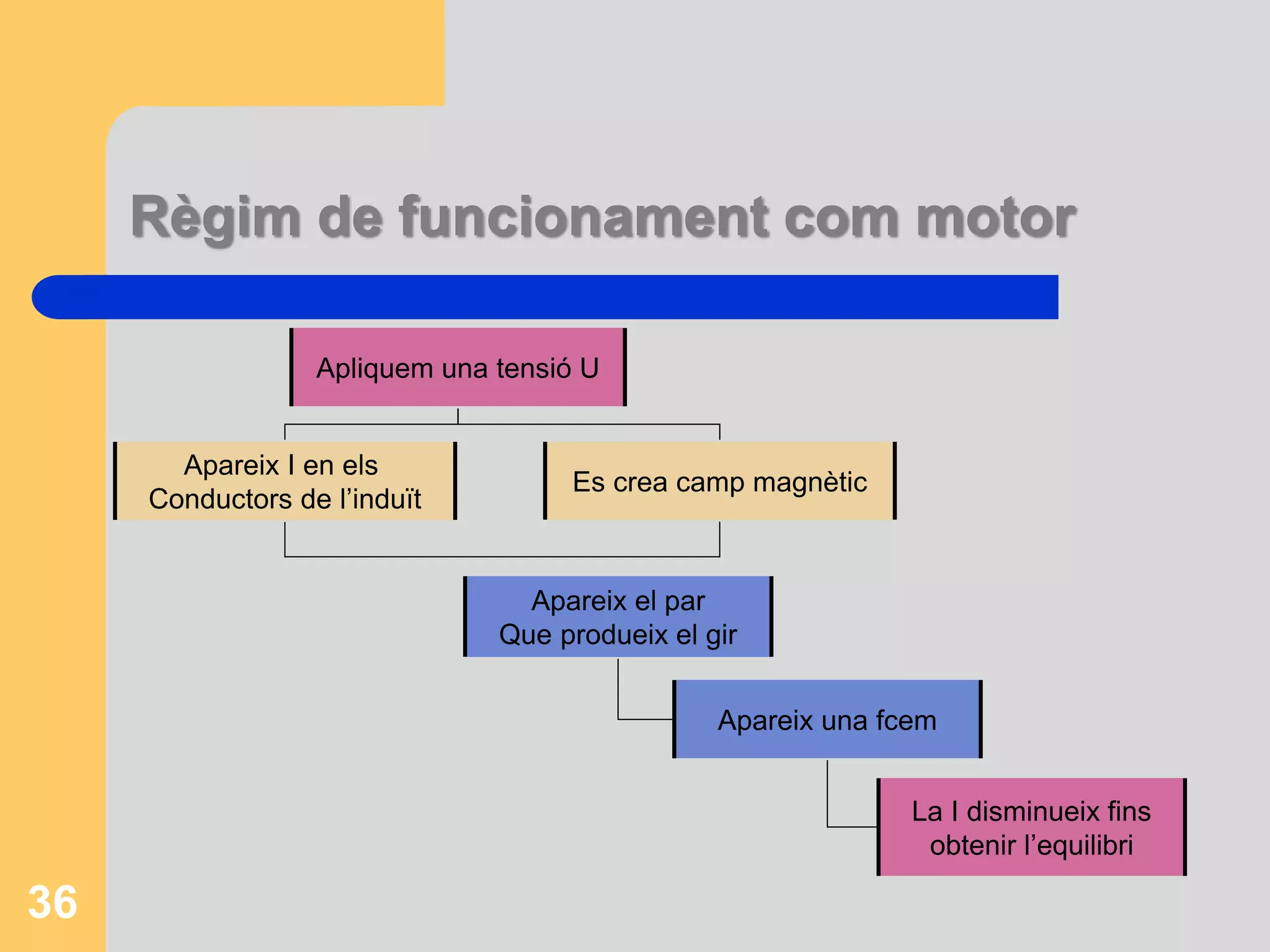
Règim de funcionamentcom motor
Apliquem una tensió U
Apareix I en els
Conductors de l’induït
Es crea camp magnètic
Apareix el par
Que produeix el gir
Apareix una fcem
La I disminueix fins
obtenir l’equilibri
36
37.
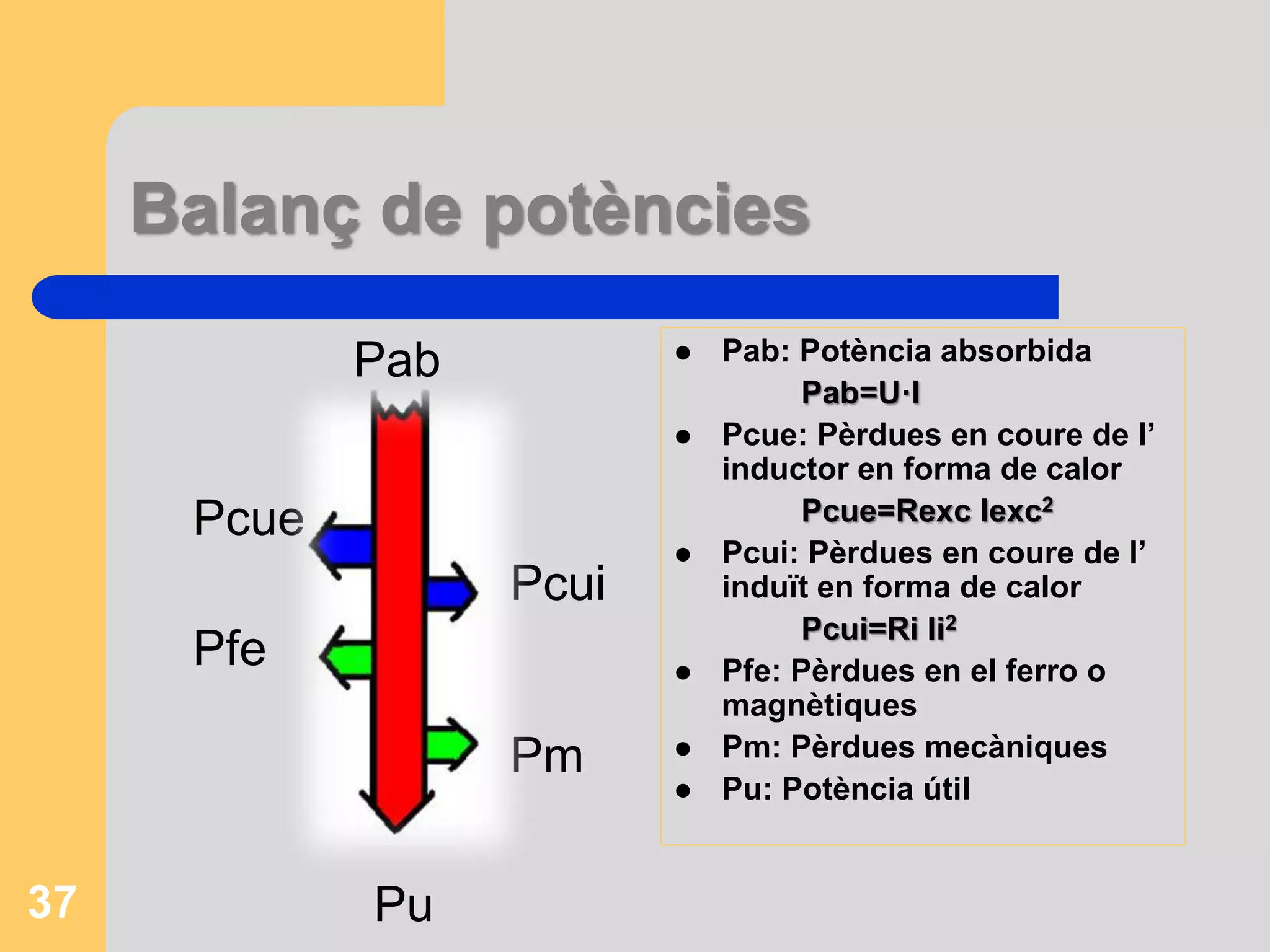
Balanç de potències
Pab
Pcue
Pcui
Pfe
Pm
Pu
Pab: Potència absorbida
Pab=U·I
Pcue: Pèrdues en coure de l’
inductor en forma de calor
Pcue=Rexc Iexc2
Pcui: Pèrdues en coure de l’
induït en forma de calor
Pcui=Ri Ii2
Pfe: Pèrdues en el ferro o
magnètiques
Pm: Pèrdues mecàniques
Pu: Potència útil
37
38.
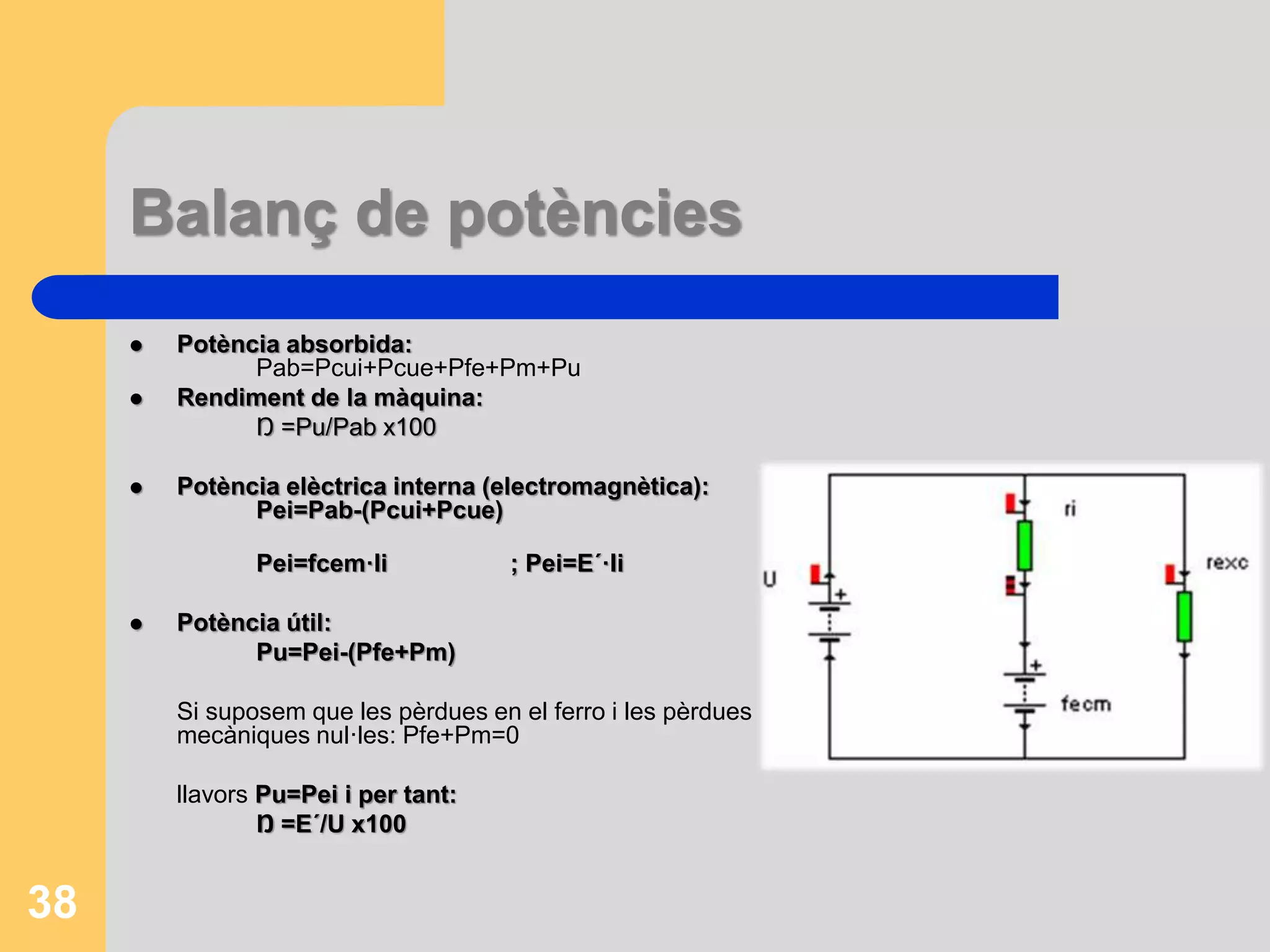
Balanç de potències
Potència absorbida:
Pab=Pcui+Pcue+Pfe+Pm+Pu
Rendiment de la màquina:
Ŋ =Pu/Pab x100
Potència elèctrica interna (electromagnètica):
Pei=Pab-(Pcui+Pcue)
Pei=fcem·Ii ; Pei=E´·Ii
Potència útil:
Pu=Pei-(Pfe+Pm)
Si suposem que les pèrdues en el ferro i les pèrdues
mecàniques nul·les: Pfe+Pm=0
llavors Pu=Pei i per tant:
Ŋ =E´/U x100
38
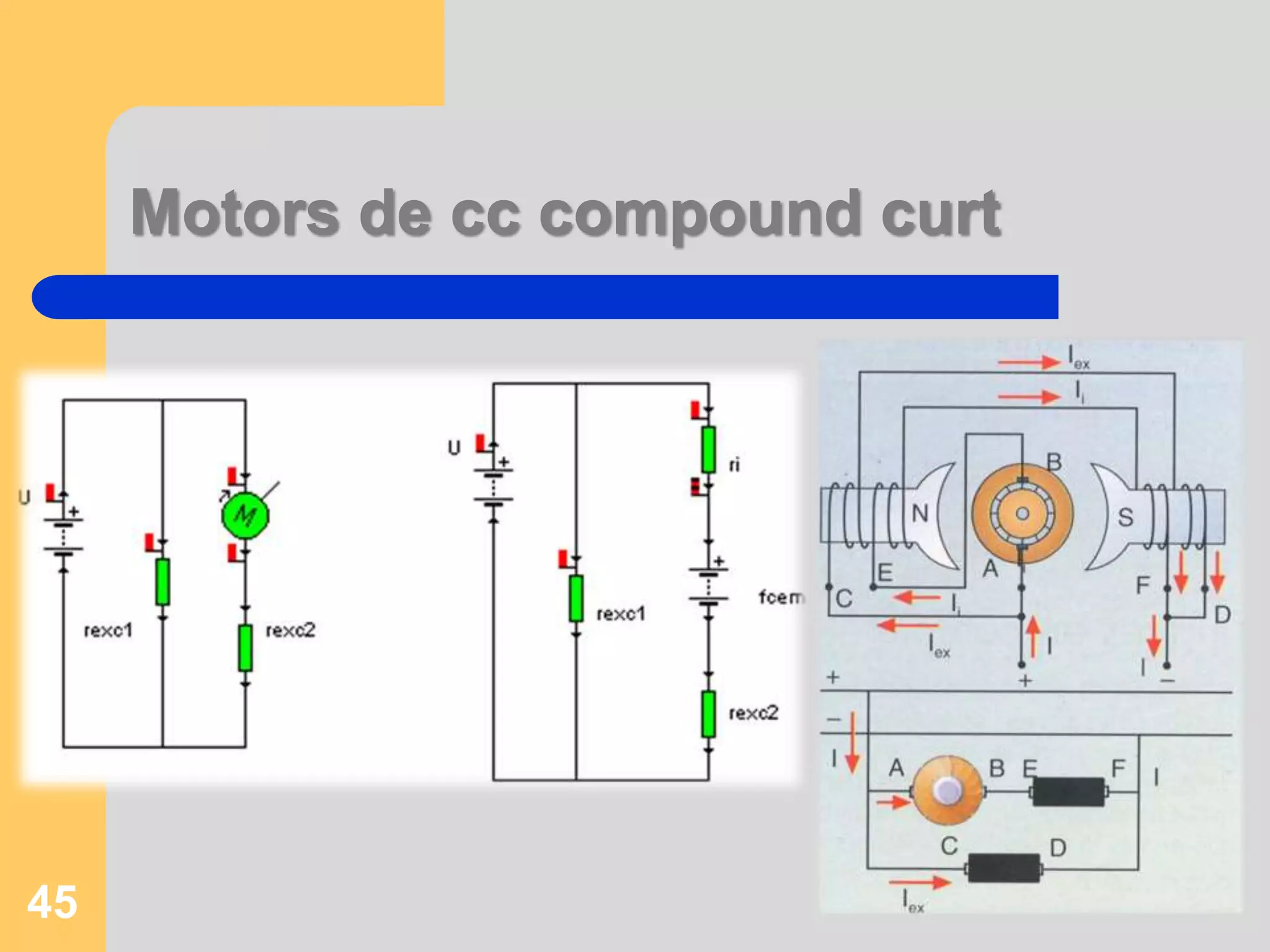
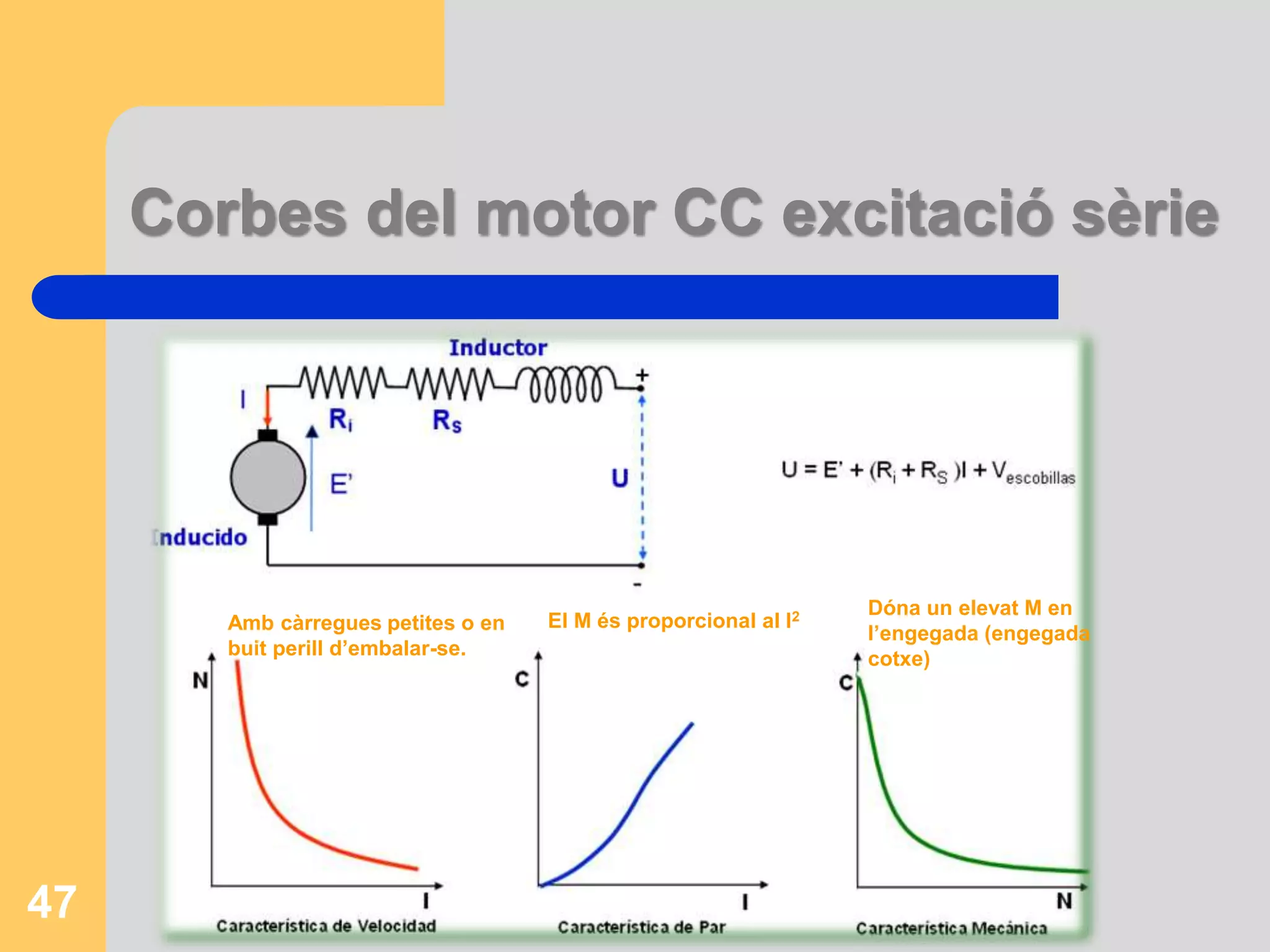
Corbes del motorCC excitació sèrie
El M és proporcional al I2 Dóna un elevat M en
l’engegada (engegada
cotxe)
Amb càrregues petites o en
buit perill d’embalar-se.
47
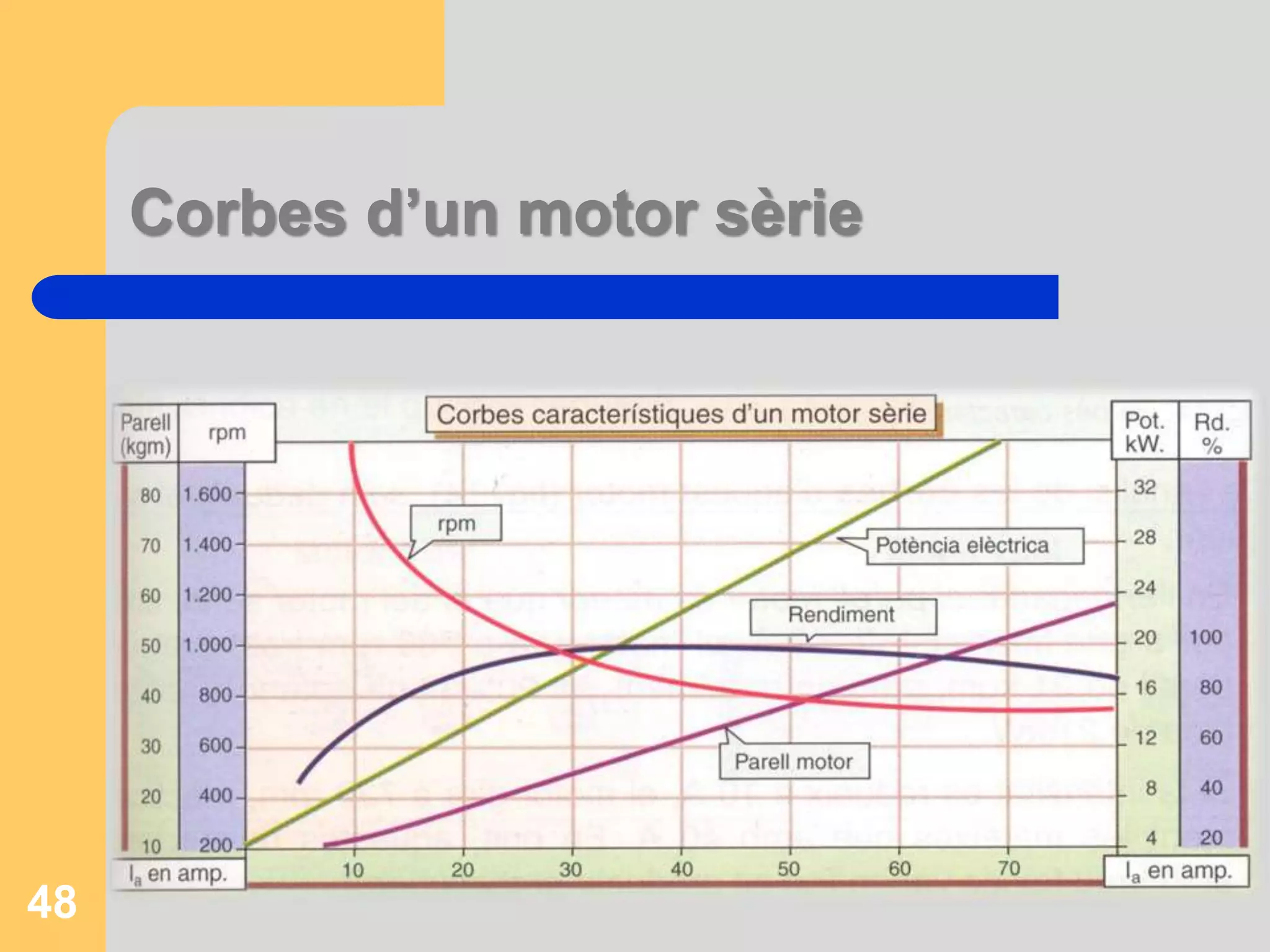
MOTOR CC ENSÈRIE
Elevat moment de rotació en l’arrencada i la seva
velocitat varia molt amb la càrrega.
La intensitat permesa en l’arrencada està entre 1,5-2,5
la IN.
El motor en sèrie no ha de funcionar en buit, perquè al
ser molt petit el seu fluxe la velocitat s’incrementaria
molt i s’embalaria.
La velocitat es regula variant la tensió d’alimentació.
Aplicació: vehicles de tracció elèctrica com
locomotores també ascensors i grues.
49
50.
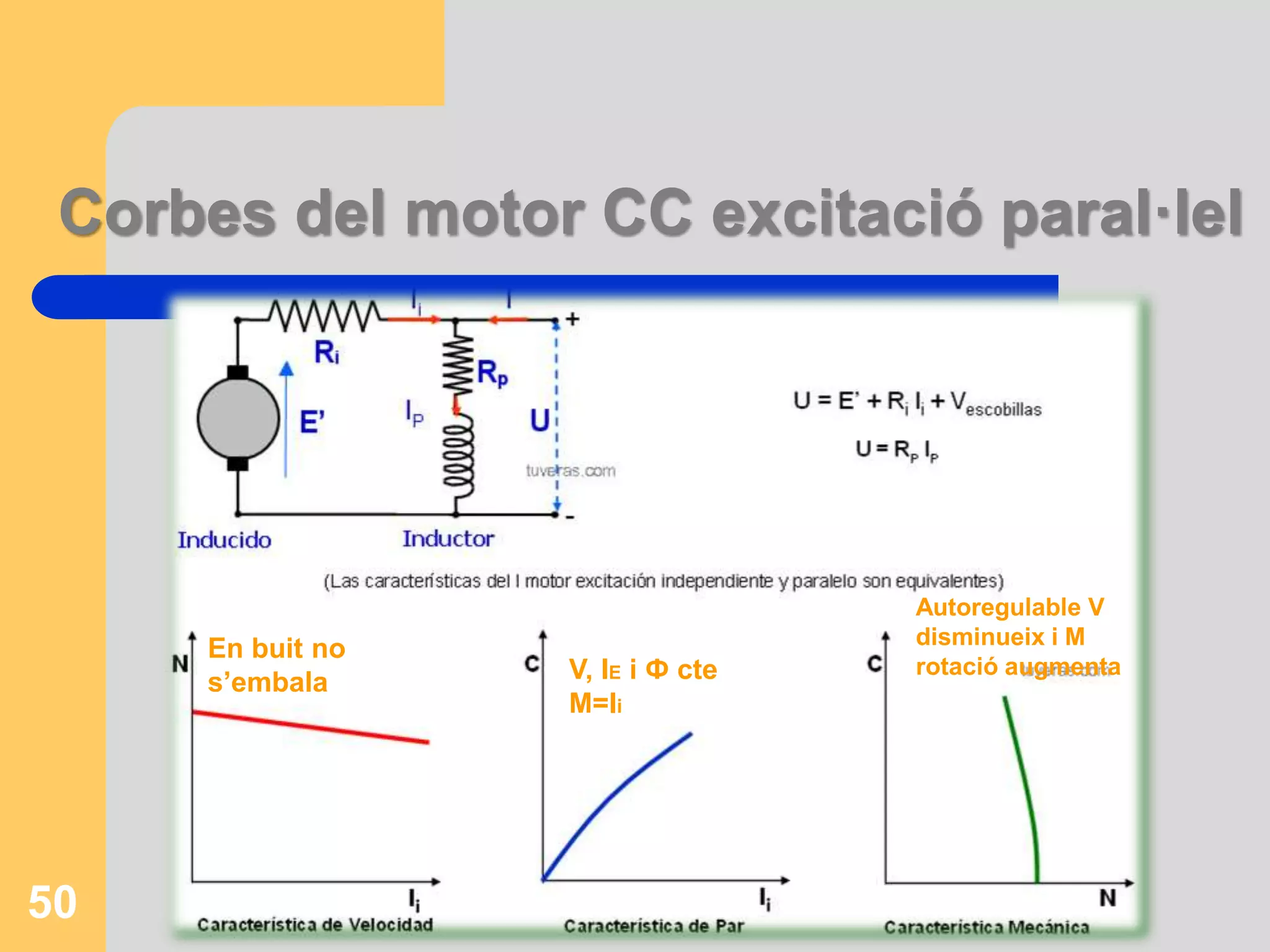
Corbes del motorCC excitació paral·lel
Autoregulable V
disminueix i M
rotació augmenta
En buit no
s’embala V, IE i Ф cte
Μ=Ii
50
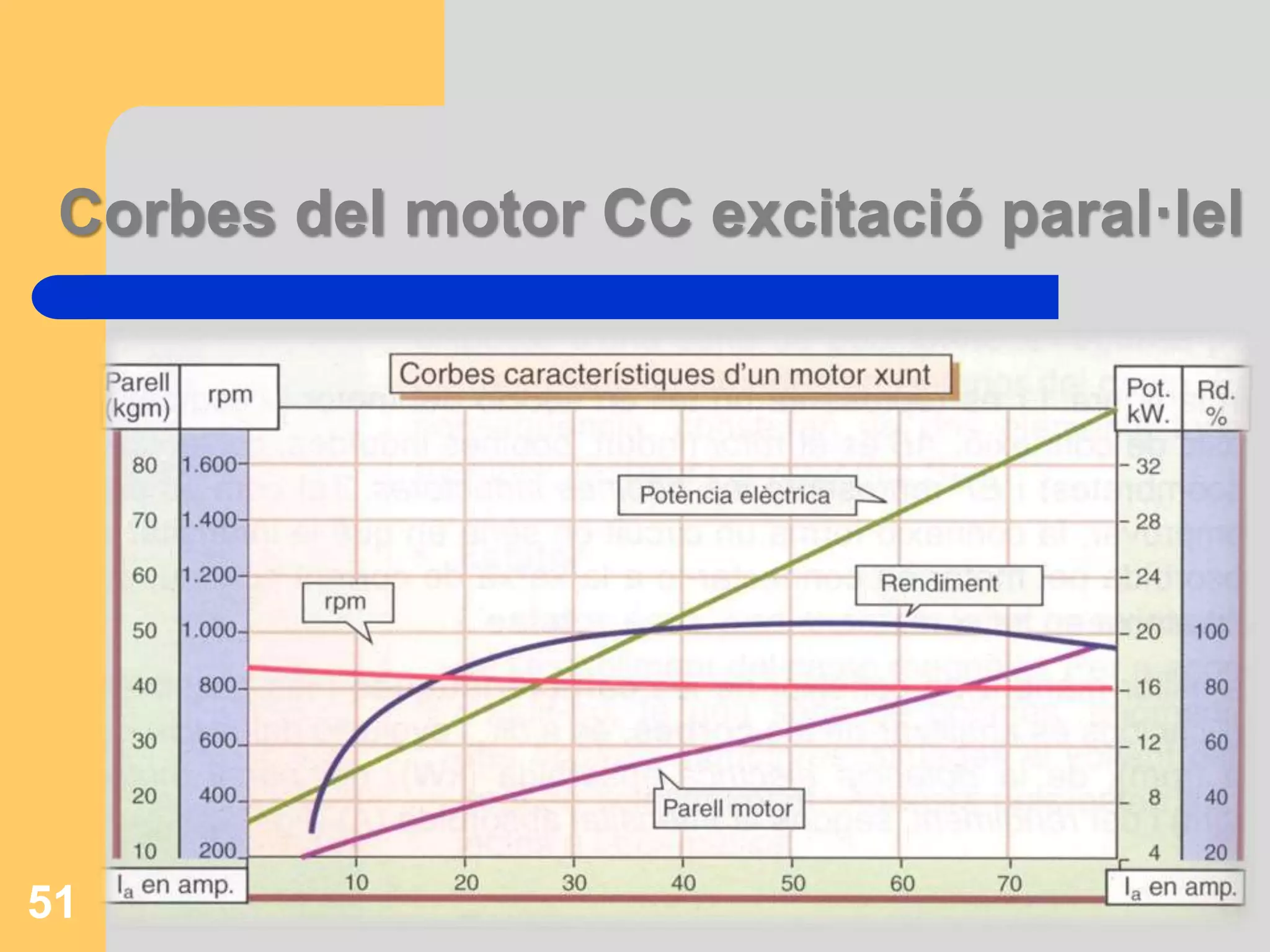
Corbes del motorCC excitació paral·lel
S’utilitzen quan no es requereix un elevat parell a
baixes velocitats i no existirà perill d’embalament en
el cas de càrrega 0.
Aplicació: Màquines eines.
En l’engegada el parell motor és menor que en el
motor sèrie, però és major que el moment nominal.
La velocitat varia molt poc amb la càrrega. És
fàcilment autoregulable.
El par d’engegada, segons la I permesa, pot arrribar
a 2 vegades el nominal.
52
Corves Motor compost
Característiques
intermitges. M
d’engegada elevat
sense perill
d’embalament en el
buit.
54
55.
Engegada dels motorsde CC
En l’engegada dels motors la velocitat és nul·la
i la f.c.e.m també és zero i per tant el valor de
la intensitat serà molt alt, aquest raonament
s’obté d’observar la fòrmula:
v
fcem
arr r
r
e i
I
El REBT estableix el nombre de vegades que
la intensitat d’engegada dels motors pot
superar a la intensitat nominal.
55
56.
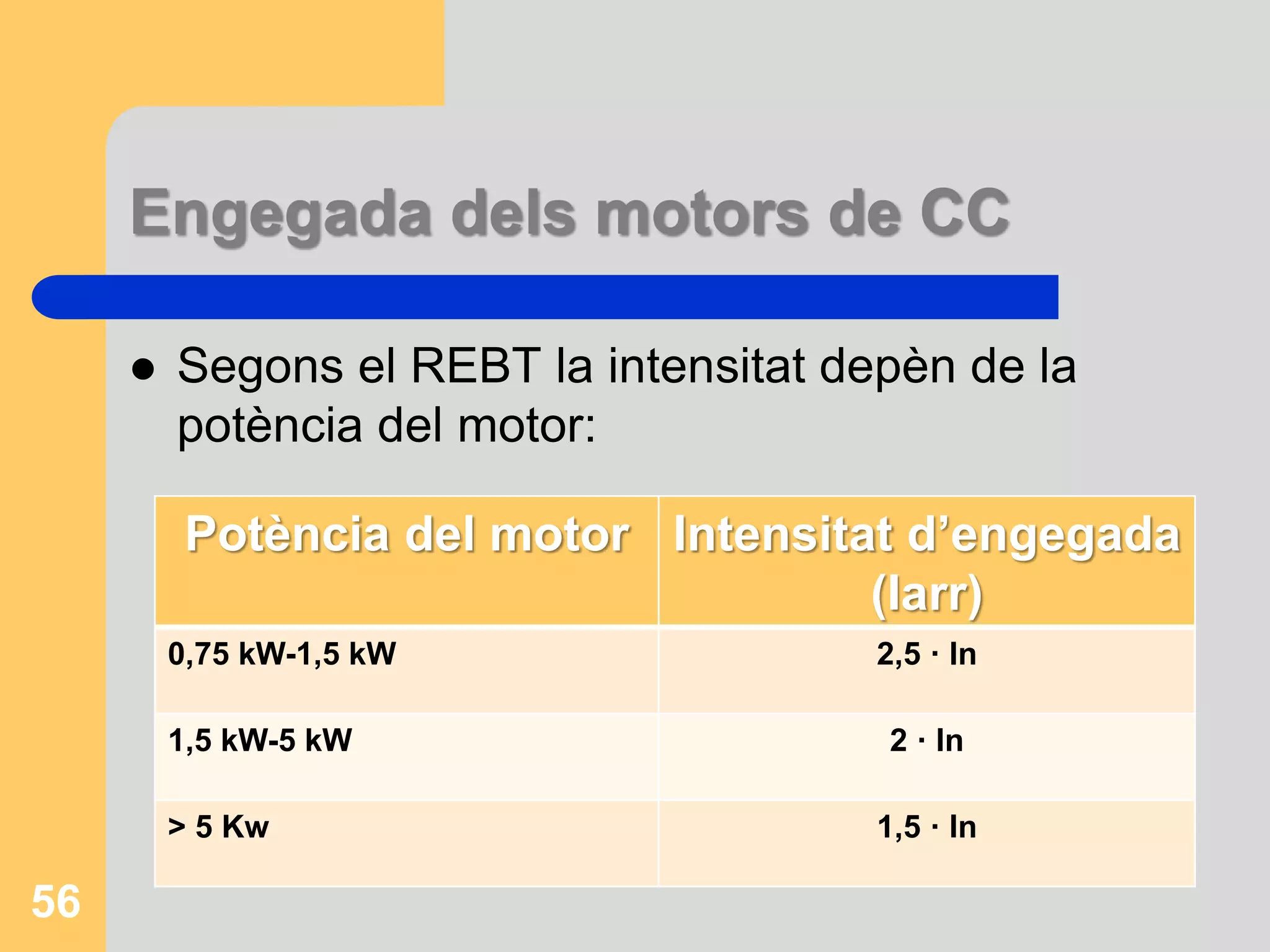
Engegada dels motorsde CC
Segons el REBT la intensitat depèn de la
potència del motor:
Potència del motor Intensitat d’engegada
(Iarr)
0,75 kW-1,5 kW 2,5 · In
1,5 kW-5 kW 2 · In
> 5 Kw 1,5 · In
56
57.
Engegada dels motorsde CC
Per reduir la I d’engegada (Iarr) es col·loca
una resistència variable en sèrie (reostat)
amb l’induït (Rarr):
v
fcem
arr r r
r
e i arr
I
A mesura que la fcem va augmentant es va
curtcircuitant la rarr. Quan la I assoleix el valor
nominal, el reostat s’haurà curtcircuitat per
complert.
57
58.
Placa de bornsd’un motor
És una placa de material aïllant en què hi ha
diversos espàrrecs roscats, anomenats,
borns, als quals es connecten els extrems del
començament i del final de les bobines del
motor.
La designació dels borns mitjançant lletres
està normalitzada.
58
Placa de característiquesmotor
Placa metàl·lica
situada a la carcassa
del motor.
Conté marcats els
principals valors
nominals del motor:
potència útil, règim
de gir, intensitat
absorbida…
60
61.
El factor deservei d’un motor
Especifica la capacitat del motor de funcionar en
condicions prolongades de sobrecàrrega. És un
factor pel que es multiplica la potència nominal per
conèixer la capacitat de sobrecàrrega que el motor
pot suportar sense excedir els límits d’elevació de T
establerts. Quan és 1.0 les condicions de
sobrecàrrega prolongades pot fer malbé l’aïllament i
que el motor funcioni incorrectament.
Si el factor de servei és de 1.15 el motor pot treballar
amb un 15% de sobrecàrrega.
61
62.
Classes de serveid’un motor
S1: motors amb funcionament continu i amb
càrrega constant. Exemple: motor d’una
depuradora.
S2: motors que funcionen només durant un
petit instant a la seva potència nominal i
després s’atura per refredar-se. Exemple:
motor de porta d’un garatge.
S3, S4, S5, S6 i S8: el motor funciona de
forma intermitent. El temps d’aturada no és
62 suficient perquè es refredi a T ambient.
63.
Canvi de sentitde gir
El canvi es du a terme invertint el sentit del
corrent en les bobines induïdes, però no en les
inductores, perquè si també s’inverteix, el motor
no modifica el seu sentit de gir.
El motor té dos borns que es connecten a la font
d’alimentació i segons la seva connexió girà en un
sentit o en un altre:
63
64.
Control de lavelocitat de gir
La velocitat es controla en el punt d’equilibri de
funcionament es a dir quan el parell motor és
igual al parell resistent mitjançant reòstats:
– Reòstat en sèrie amb les bobines de l’induït
– Reòstat en sèrie o paral·lel amb les bobines de
l’inductor.
– Reòstat d’engegada que variarà el voltatge
d’alimentació. El més utilitzat perquè té menys pèrdues
de rendiment.
64