Download as PDF, PPTX

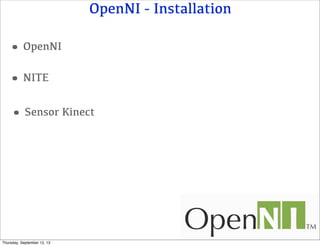
![OpenNI - Data
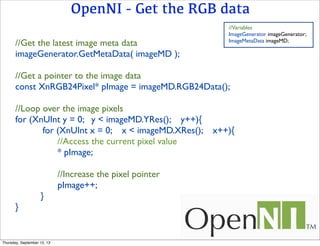
RGB Image Depth Image
Label Image
[640 480]
Depth: Unsigned short
Label: Unsigned short
RGB: Unsigned char
Thursday, September 12, 13](https://image.slidesharecdn.com/kinecttutorial-130916112651-phpapp01/85/Kinect-Tutorial-12-320.jpg)
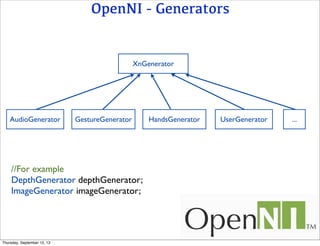
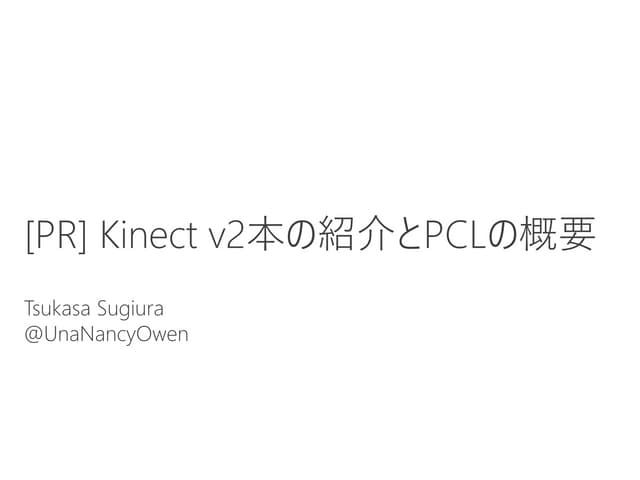
![OpenNI - Skeleton data
//Variables
UserGenerator userGenerator;
XnUserID userIDs[ numTrackedUsers ];
XnUInt16 numUsers = userGenerator->GetNumberOfUsers();
userGenerator->GetUsers(userIDs, numUsers);
for( int i=0; i < numUsers; i++ ){
if( userGenerator->GetSkeletonCap().IsTracking( userIDs[i] ) ){
XnPoint3D userCenterOfMass;
userGenerator->GetSkeletonCap().IsCalibrating( userIDs[i] );
userGenerator->GetSkeletonCap().IsCalibrated( userIDs[i] );
userGenerator->GetCoM( userIDs[i], userCenterOfMass );
XnSkeletonJointTransformation jointData;
if( userGenerator->GetSkeletonCap().IsJointAvailable( XN_SKEL_HEAD ) ){
userGenerator->GetSkeletonCap().GetSkeletonJoint(userIDs[i], XN_SKEL_HEAD, jointData );
}
}
}
Thursday, September 12, 13](https://image.slidesharecdn.com/kinecttutorial-130916112651-phpapp01/85/Kinect-Tutorial-20-320.jpg)
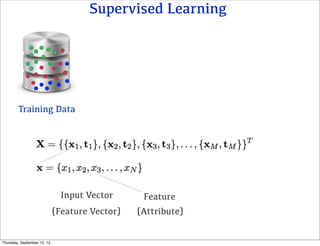
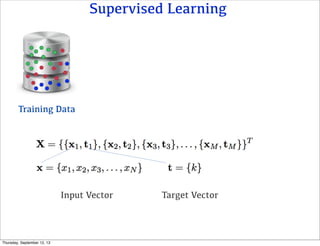
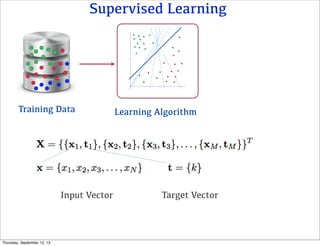
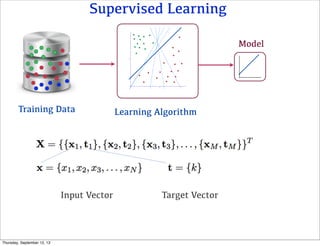
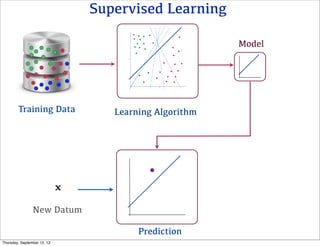
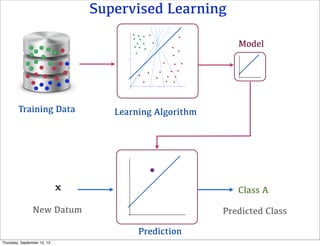
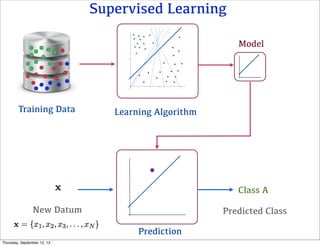
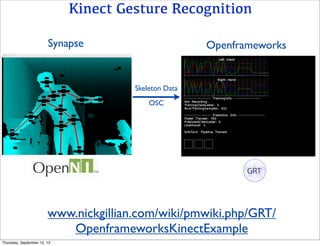
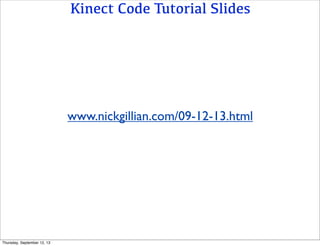

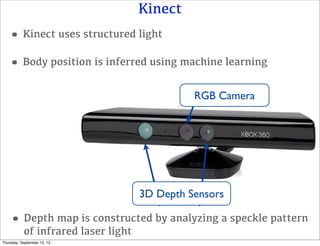
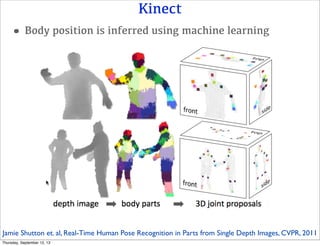
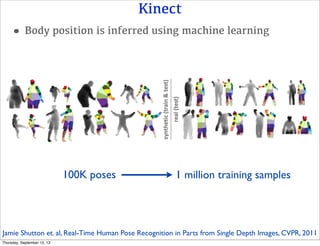
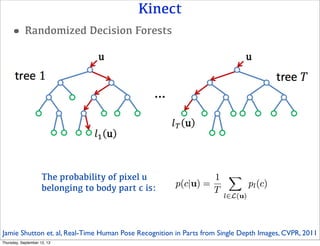
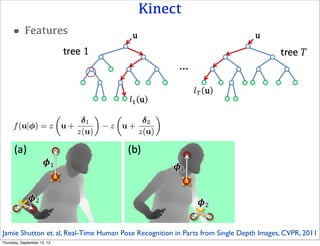
The document summarizes a tutorial presentation about the Kinect and its 3D depth sensing capabilities. It describes how the Kinect uses structured light and machine learning to construct depth maps and infer body position from depth images. It also provides an overview of the OpenNI and NITE libraries for accessing Kinect sensor data and the types of data that can be accessed like RGB images, depth maps, and skeletal joint positions.










































![[PDF] the molecular control toolkit - Controlling 3D molecular graphics via g...](https://cdn.slidesharecdn.com/ss_thumbnails/pdfthemolecularcontroltoolkit-controlling3dmoleculargraphicsviagestureandvoice-150320221855-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)





















































