Downloaded 72 times




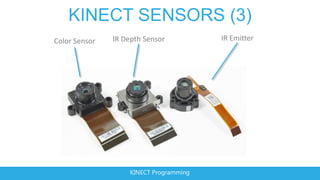
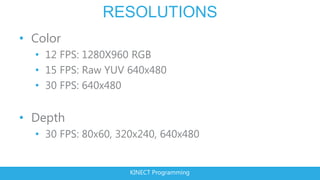
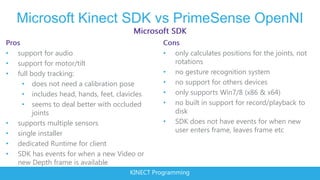
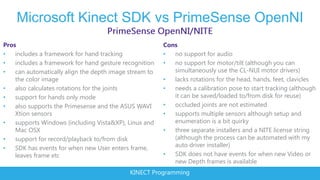




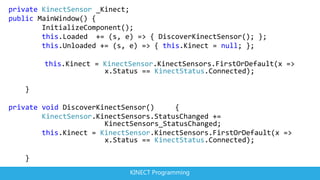
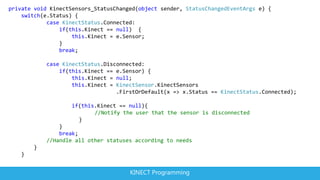
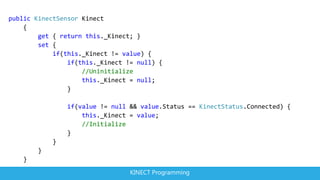
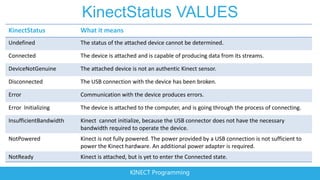
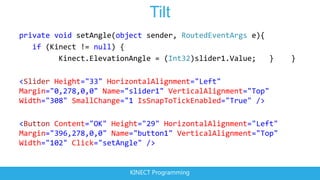

The document discusses the Microsoft Kinect sensor and its capabilities. It provides information on the Kinect's resolutions for color, depth and skeletal tracking. It compares the Microsoft Kinect SDK to the OpenNI SDK. It also provides an overview of getting started with the Kinect SDK and examples of basic Kinect API usage in C# for discovering sensors, managing the sensor state, retrieving data, and controlling the tilt motor.