Download to read offline


![fseek(cmdFile, 1, SEEK_SET); //avoid leading quote
fread(cmdStr, fsize, 1, cmdFile);
fclose(cmdFile);
cmdStr[fsize] = 0;
cmdStr[fsize-1] = 0; //delete trailing quote
int cmdInt=atoi(cmdStr);
Serial.println("Command Number");
Serial.println(cmdInt);
Convert the command to an int](https://image.slidesharecdn.com/inteliotwebinar1-tedisonpresentation-150410075337-conversion-gate01/85/Intel-IoT-webinar-1-Tedison-presentation-8-320.jpg)

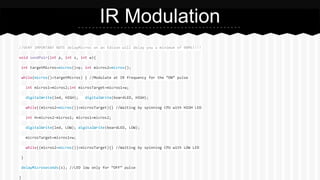

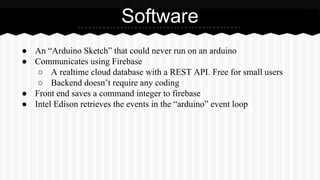
This document discusses controlling a Robosapien toy robot from an Intel Edison board. An Arduino sketch runs on the Edison to communicate with a Firebase database and retrieve command integers. The Edison then converts the commands and uses infrared LED modulation to send signals to the Robosapien over infrared to control its movements and sounds.




































































![[HACKATHON CISCO PARIS] Slideshow du workshop Smart City](https://cdn.slidesharecdn.com/ss_thumbnails/ciscoparisworkshopopeningslideshow-160325094835-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Workshop e résidents] présentation intent, craft ai, dalkia et incubateur](https://cdn.slidesharecdn.com/ss_thumbnails/workshope-rsidentsprsentationintentcraftaidalkiaetincubateur-160202110412-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Webinar E-résidents #1] Présentation des différents métiers du bâtiment conn...](https://cdn.slidesharecdn.com/ss_thumbnails/prsentationpourlehackathon201601v2-160120114429-thumbnail.jpg?width=640&height=640&fit=bounds)
![[IoT World Forum Webinar] Review of CMX Cisco technology](https://cdn.slidesharecdn.com/ss_thumbnails/cmxtechnologiecisco-151204102222-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)























